基于GNSS载波相位仿射约束姿态确定算法*
2015-05-03陈西北刘海颖陈志明
陈西北,刘海颖,陈志明,刘 聪
(1南京航空航天大学自动化学院 南京 210016 2南京航空航天大学航天学院 南京 210016)
引言
基于GNSS的姿态确定是导航制导控制系统的重要组成部分,其应用前景广阔。如文献[1~3]给出了基于GNSS的姿态确定在编队飞行星载平台姿态确定方面的应用,文献[4~6]给出了基于GNSS的姿态确定在联合精密着陆、低成本无人机姿态确定和精密引导船舶入港等方面的应用。
基于GNSS的姿态确定,主要通过在平台上安装多个天线来估计机体坐标相对于选定的当地垂直坐标系的三个方位角。要想实现高精度的姿态确定,需要使用载波相位观测值。在整周模糊度正确固定的情况下,载波相位观测伪距精度能够达到厘米级。
文献[7]给出了基于GNSS载波相位的严格姿态确定算法,该算法中包含的未知量有整周模糊度和正交转换矩阵,并利用了平台上天线的机体坐标先验信息。文献中给出的姿态算法能够实现较高的模糊度解算精度和姿态输出精度,但是由于正交限制,其内部搜索算法非常复杂,工程上难以实现。
文献[8]在文献[7]的基础上提出一种新的姿态确定算法-仿射约束姿态确定模型AC-AM(Affine Constrained Attitude Model)。该算法去掉了转换矩阵的正交限制,对基线坐标进行仿射变换。相比于正交约束姿态确定算法,AC-AM算法约束少,同等条件下精度低。但是AC-AM算法利用基线仿射约束对模糊度进行估计,提高了模糊度估计精度。在增加有效基线的情况下,AC-AM算法能够较好地提高模糊度估计精度,进而提高姿态输出精度。
文献[9,10]提出了基于GNSS的姿态直接计算法和载波平滑伪距法,与AC-AM姿态确定算法相比,直接计算法和载波平滑伪距法比较简单,计算速度快,易于实现。
本文使用MATLAB构建仿射约束姿态确定算法仿真模型,处理由GNSS接收机接收的动态和静态导航数据,输出姿态信息。本文还利用直接姿态确定算法和载波平滑伪距姿态确定算法对相同的导航数据进行姿态输出,比较姿态输出精度。
评价姿态确定算法性能,还有一个重要的指标就是所需的时间,它体现了算法的实时性。由于本文是对导航数据进行后处理,因此着重分析算法的姿态输出精度,而且三种算法仿真分开进行,难以作精确时间对比。本文仿真在个人计算机(4GB内存)上运行,使用MATLAB2012b完成仿真分析。
1 多天线配置和坐标转换
假设使用n个天线(接收机)进行姿态确定,通常需要选择其中的一个天线作为主天线。一般而言,主天线是所有天线中质量和稳定性最好的。在安装天线时,要使各天线在平台上均匀分布,如图1所示,避免主天线到各从天线的矢量在一条直线上。如果使用C/A码来确定基线向量,则误差在分米级范围内,若使用载波数据,则可使误差达到厘米级[8]。

图1 平台多天线分布示意图Fig.1 The distribution of multiantenna on the platform
在进行差分定位之前,首先对主天线进行单点定位。对于没有地面基站辅助的移动平台,其单点定位精度比较低,产生的三维误差能够达到数米甚至数十米。然而这么大的单点定位误差,对于从天线当地地理坐标系坐标解算精度只有厘米级的影响[6]。换言之,单点定位的高误差不会导致姿态确定精度大幅下降。通过单点定位确定主天线的位置后,再通过差分定位得到主天线到各从天线的基线。
在进行姿态确定时,需要用到两个坐标系,分别是当地垂直坐标系LLF(Local Level coordinate Frame)和机体坐标系ABF(Antenna Body Frame)。当地垂直坐标系原点位于载体质心,其中一坐标轴沿当地地理垂直的方向,另外两个轴在当地水平面内分别沿当地经线和纬线的切线方向。根据坐标轴方向的不同,LLF坐标系可以是东北天、北东地、北西天等右手直角坐标系。本文选用东北天ENU(East North Up)坐标系。ABF坐标系的原点亦位于载体质心,通过至少三个接收天线就可以确定ABF坐标系的三轴方向。ABF坐标系在天线安装好后就确定不变了,而LLF坐标系是随着每个历元测量值的不同不断变化的。
被测载体的姿态,其实就是ENU坐标系和ABF坐标系之间的转换角。其关系如下:

其中,运算符c和s分别表示cos(·)和sin(·),y、r和p分别表示航向角、横滚角和俯仰角。bi表示天线i在机体坐标系下的坐标,li表示天线i在东北天坐标系下的坐标。Rc表示两个坐标系的转换矩阵。
2 直接姿态确定算法
直接姿态确定算法计算效率高,计算过程简单,不需要依赖机体坐标系的先验坐标信息。主天线1在机体坐标系中一般位于原点位置,从天线2和从天线3的位置表示为b2=[0b120]T和b3=[x3,by3,b0]T,b12表示的是主天线1到从天线2的基线距离。将天线2和天线3的ABF坐标值代入式(1)可得

式中,l2表示天线2在ENU坐标系下的坐标,b12和l2均在差分定位时计算得到。由式(2)我们可以计算得到航向角y和俯仰角p


天线3的ENU坐标值用来确定横滚角。



由式(4)计算俯仰角时,没有用到b12基线值,由式(7)计算横滚角时也没有用到天线3的ABF坐标值,可见直接姿态确定算法不需要天线机体坐标先验信息。
直接姿态确定算法简单,解算速度快。但是由于它没有充分利用一些先验信息,比如在天线安装时可以精确确定的天线基线距离和ABF坐标值,且只用到了三个天线,未充分利用冗余天线信息,姿态输出精度不高。
3 载波平滑伪距算法
对式(1)作线性化处理,我们假设最初的姿态角分别为y0、r0和p0,可以构建以下姿态估计模型
将转换矩阵Rc表示为列向量:Rc=[r1r2r3]T,Ai可表示为
式(8)中,R0是在航向角、横滚角和俯仰角分别为y0、r0和p0时的转换矩阵,Δbi和Δli分别是天线i在ABF坐标系下的坐标误差和在ENU坐标系下的坐标误差,I表示单位矩阵,O为零矩阵。根据最小二乘法则,三个姿态角的修正值可以表示为

式(10)中,Cli和Cbi分别是li和bi的协方差矩阵,Wi=R0bi-li。通过式(10)解算出姿态角修正值,然后反复迭代至要求的精度。
载波平滑伪距法比直接姿态确定算法多了一个平滑伪距的过程,即通过最小二乘处理得到姿态修正值,通过反复迭代提高姿态确定的精度。由于载波平滑伪距算法能够较好地利用冗余配置天线信息,因此姿态输出精度有所提高。然而,该方法仍未充分利用天线安装时已精确确定的基线信息,姿态输出精度仍有提升空间。
4 仿射约束姿态确定算法
仿射约束姿态确定算法在充分利用冗余天线配置信息的同时,还能有效利用天线间已精确确定的基线信息,姿态输出精度较高,其计算过程如下:
假设r+1个天线同时跟踪载波频率为f、数量相同的GNSS导航卫星,将双差载波和伪码观测方程线性化后代入多元高斯·马尔科夫模型,可以得到GNSS姿态确定模型



上式中,E和D分别代表期望和方差,Y是双差伪码和载波观测值,A为2m×m双差模糊度系数矩阵,Z=[z1,...,zr]为m×r矩阵,zi为未知双差模糊度向量,G为2m×3几何矩阵,其中包含在协议地球坐标系中接收天线到导航卫星的方向余弦信息。R是未知3×q正交矩阵(RTR=Iq),该矩阵包含姿态信息。为3×r矩阵,为未知基线向量。B0为已知q×r矩阵,其值由固定在平台上的天线的几何位置决定,q值由基线维度决定。m为系统的维数,与GNSS所跟踪的卫星数有关。⊗表示Kronecker乘法,P和Qyy分别为r×r和2m×2m已知矩阵,矩阵P与r个基线向量的相关性有关,而Qyy与载波和伪距数据精度有关。vec(·)是将矩阵转换成矢量的矢量算子。符号表示整数矩阵集,符号表示正交矩阵集。
式(11)中,矩阵B的值可以通过GNSS数据双差估算得到。平台上天线安装好后,矩阵B0可以精确确定。于是通过最小二乘法可以估算出矩阵




RENU-WGS84矩阵是将WGS84坐标系转换到ENU坐标系的转换矩阵。由矩阵可得卫星平台的航向角y、俯仰角p和横滚角r



本文使用姿态精度因子ADOP(Attitude DOP)来衡量仿射约束对姿态确定精度的影响,姿态精度因子计算过程如下[11]

其中矩阵R是姿态输出矩阵。下文简称仿射约束姿态确定算法为AC-LAMBDA(Affine Constrained LAMBDA)。
5 仿真实验与分析
5.1 静态数据分析
静态数据使用的是文献[10]中的处于静止状态的GPS接收机数据,一个参考站位置精确确定,另三个接收机处于静止状态。其中,参考站和三个接收机各产生一个观测文件,共有四个观测文件,另有一个导航文件。
观测文件观测时间窗口内可见星保持9颗不变,采样频率为1Hz,一共有649个历元。在仿真时使用TEQC软件截取前400个历元进行分析。天线坐标和姿态信息已经提前精确确定。航向角为51.6656°,俯仰角为26.1822°,横滚角为-39.0734°,四个天线的地心地固坐标系ECEF坐标如表1所示。
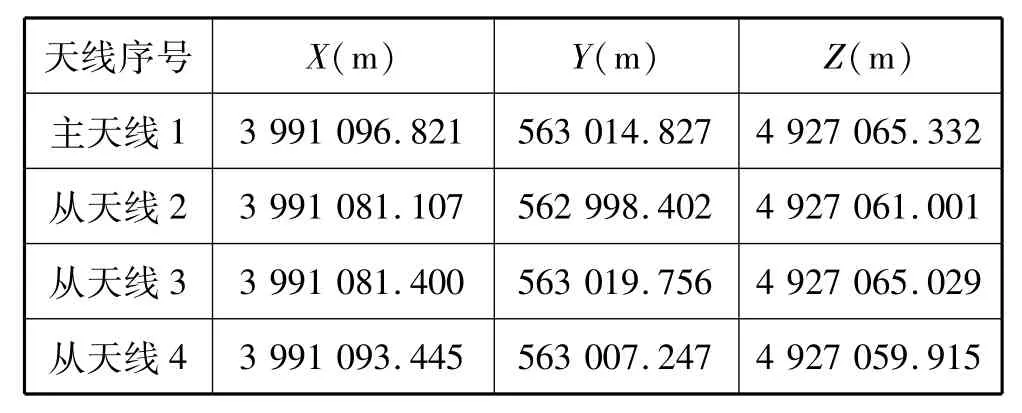
表1 静态数据天线坐标位置Table1 Antenna coordinates of static data
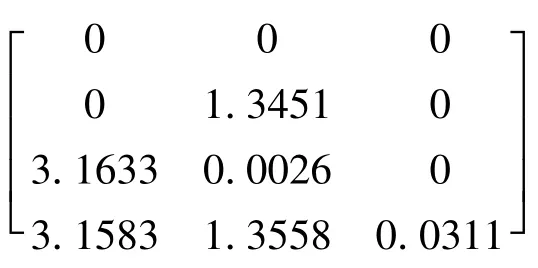
四天线在ABF坐标系下的坐标(单位为m)定义为
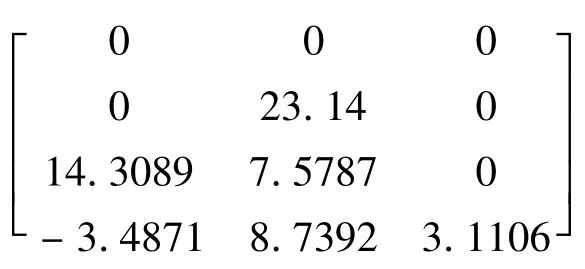
四个天线在ABF坐标系中的分布如图2所示,一般主天线位于原点位置,从天线2和从天线3位于相对垂直(或近似垂直)的两个方向,从天线4为冗余配置天线。
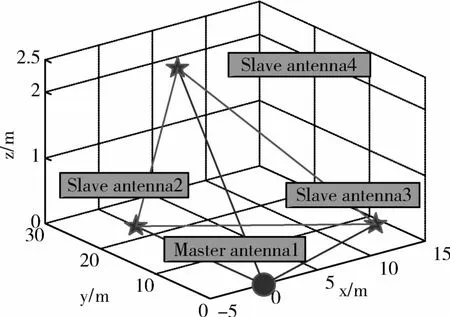
图2 静态数据天线分布图Fig.2 The distribution of antennas for static data
图3是静态数据航向角、俯仰角和横滚角输出。
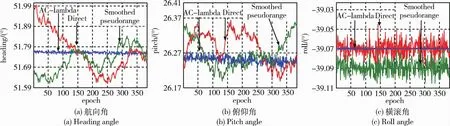
图3 静态数据姿态角输出Fig.3 Output attitude angles of static data
由三个姿态角输出结果可以看出,AC-LAMBDA姿态确定算法的精度要比直接法和载波平滑伪距法高。直接法和载波平滑伪距法之间的区别在图3中体现得不明显。表2中列出了三种方法的均值和标准差比较。从标准差中可以看出,载波平滑伪距法要比直接法精度高,但是相差不大,AC-LAMBDA法较前两种方法明显提升了姿态输出精度。
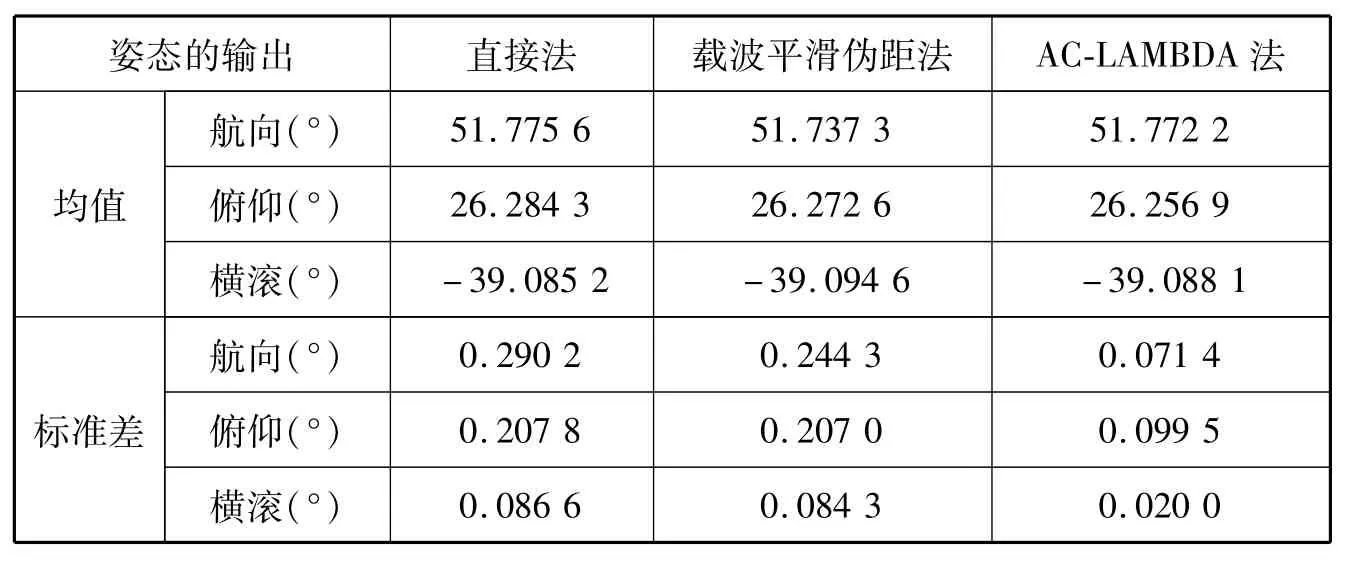
表2 静态数据姿态角输出均值和标准差Table2 Mean values and standard deviations of output attitude angles of static data
5.2 动态数据分析
动态数据为车载数据,将四个GPS接收机安装在车上的适当位置,接收机在运动状态下接收数据。此时,输出的三维姿态角会随着时间变化。车载天线构型如图4所示。
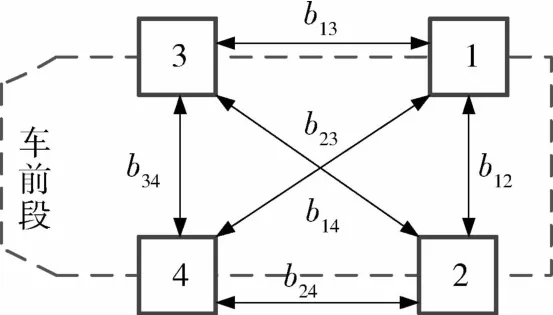
图4 动态数据天线构型Fig.4 Antenna configuration for dynamic data
b12表示天线1到天线2的基线距离,其他基线符号意义以此类推,天线1定义为主天线。各基线值如表3所示。

表3 天线之间基线的值Table3 The baseline between antennas
与静态数据类似,动态数据也由一个导航文件和四个观测文件组成。观测文件数据采集时间窗口为2013年11月14日12:51:00~2013年11月14日12:51:30,在该时段可见星保持9颗不变,一共有600个历元。平台上四个接收机的机体坐标值(单位为m)定义为
四个天线在ABF坐标系中的分布如图5所示。
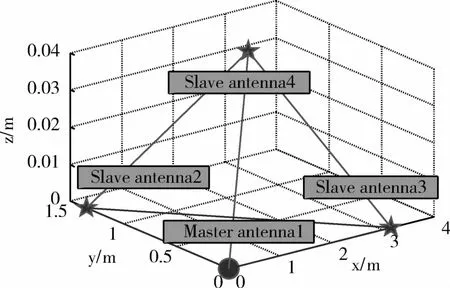
图5 动态数据天线分布图Fig.5 The distribution of antennas for dynamic data
图6是动态数据航向角、俯仰角和横滚角的输出。由于平台是运动的,其姿态角也会随着平台的运动而变化,图6中的航向角、俯仰角和横滚角在600个历元范围内是有变化的,表现为图6中三维姿态角曲线有一定的倾斜。从曲线变化程度上看,AC-LAMBDA法的精度要比另两种方法高。
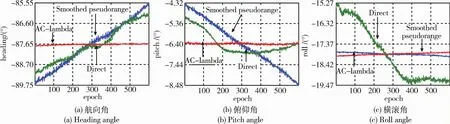
图6 动态数据姿态角输出Fig.6 Output attitude angles of dynamic data
由于平台是运动的,所以不能再用均值和标准差来评估三种方法姿态输出精度优劣。但是通过计算ADOP姿态精度因子可以从侧面评估载波平滑伪距法和AC-LAMBDA法姿态输出的精度。两种方法得到的ADOP值如图7所示。AC-LAMBDA法姿态精度因子较小,说明AC-LAMBDA法姿态精度更高。
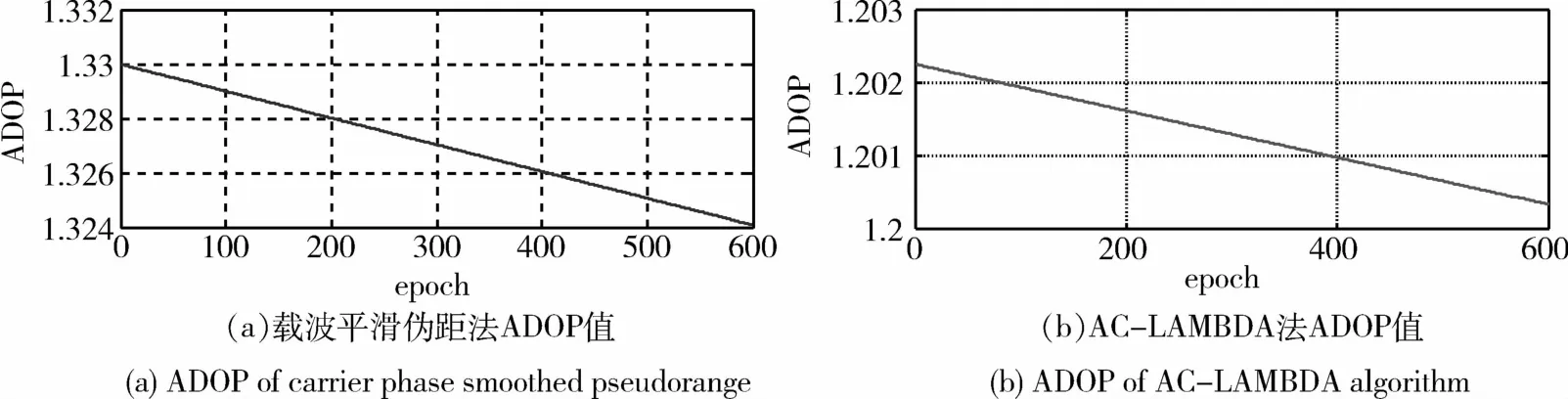
图7 两种姿态确定方法的姿态精度因子Fig.7 ADOP of two attitude determination algorithms
6 结束语
直接姿态确定算法计算简单,由于它没有利用冗余配置天线载波信息和天线安装基线信息,其精度较低。载波平滑伪距姿态确定算法能够利用冗余配置天线载波信息,通过最小二乘处理得到姿态修正信息,较直接姿态确定算法精度有所提高。AC-LAMBDA姿态确定算法不但可以充分利用冗余配置天线载波信息,还有效利用了安装天线时可以精确确定的基线信息,其精度较前两种方法都要高。
本文通过MATLAB软件仿真,对静态多天线接收机数据和动态多天线接收机数据采用三种姿态算法作姿态输出。通过对比姿态、标准差、均值和姿态精度因子等参数,得到AC-LAMBDA姿态确定算法姿态输出精度高于直接姿态确定算法和载波平滑伪距姿态确定算法的结论,验证了理论分析的正确性。仿射约束姿态确定算法软件仿真的实现,也为我国基于GNSS载波的高精度姿态确定在工程上的实现积累了技术基础。
[1]Buist P J,Teunissen P J G,Giorgi G,et al.Multivariate Bootstrapped Relative Positioning of Spacecraft Using GPS L1/Galileo E1 Signals[J].Advances in Space Research,2011,47(5):770 ~785.
[2]李建国,崔祜涛,田 阳.基于乘性四元数和约束滤波的飞行器姿态估计算法[J].系统工程与电子技术,2013,35(5):1031~1036.Li Jianguo,Cui Hutao,Tian Yang.Spacecraft Attitude Estimation Algorithm Based on Multiplicative Quaternion and Constrained Filter[J].Systems Engineering and Electronics,2013,35(5):1031 ~1036.
[3]徐定杰,党 超,沈 锋.一种解算整周模糊度几何算法实现 GPS快速测姿[J].宇航学报,2011,32(12):2518~2525.Xu Dingjie,Dang Chao,Shen Feng.A Geometric Method for Integer Ambiguity Solution in GPS Attitude Determination[J].Journal of Astronautics,2011,32(12):2518 ~2525.
[4]Hide C,Pinchin J,Park D.Development of a Low Cost Multiple GPS Antenna Attitude System[C]//Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation(IONGNSS 2007),2001:88~95.
[5]Giorgi G,Teunissen P JG,Verhagen S,et al.Testing a New Multivariate GNSSCarrier Phase Attitude Determination Method for Remote Sensing Platforms[J].Advances in Space Research,2010,46(2):118 ~129.
[6]盛汉霖,张天宏,刘冬冬.基于扩展卡尔曼滤波器的低成本航姿系统设计[J].系统工程与电子技术,2013,35(10):2158-2164.Sheng Hanlin,Zhang Tianhong,Liu Dongdong.Low-cost AHRSDesign Based on Extending Kalman Filter[J].Systems Engineering and Electronics,2013,35(10):2158~2164).
[7]Teunissen P.A General Multivariate Formulation of the Multi-Antenna GNSS Attitude Determination Problem[J].Artificial Satellites,2007,42(2):97~111.
[8]Teunissen P J G.The Affine Constrained GNSSAttitude Model and Its Multivariate Integer Least-Squares Solution[J].Journal of Geodesy,2012,86(7):547~563.
[9]Lu G.Development of a GPS Multi-Antenna System for Attitude Determination[M].University of Calgary,1995.
[10]Dai Z,Knedlik S,Loffeld O.A MATLAB Toolbox for Attitude Determination with GPS Multi-Antenna Systems[J].GPS Solutions,2009,13(3):241~248.
[11]Park K J,Wilkins M P,Bruccoleri C.Uniform ly Distributed Flower Constellation Design Study for Global Navigation System[J].Paper AAS,2004:04 ~297.
