基于故障树的工程作业船与海上平台碰撞风险评价模型
2015-04-30钟汉明薛杰
钟汉明 薛杰


【摘 要】 针对工程作业船舶与海上平台存在的碰撞风险,评价和总结国内外研究现状,介绍水上交通领域风险评价基本流程,提出基于故障树的作业船舶与海洋油气生产平台碰撞风险评价模型,通过计算最小割集的发生概率,预测碰撞概率。该模型对碰撞风险评价提供一种新的解决思路,具有潜在的应用前景。
【关键词】 海上平台;海洋工程;工程作业船舶;碰撞风险;故障树
0 引 言
随着石油、天然气、渔业、风能等海洋资源开发活动的不断开展,各种海上离岸建筑也在不断地建设并投入使用,其中最为典型的是海洋油气生产平台和钻井平台。
挪威船级社发布的《全球海上事故数据库》统计资料显示,1970―2002年,全球共发生船舶与平台碰撞事故465起,其中,工程作业船舶在平台作业、演习、生产和维修过程中发生的事故189起,占事故总数的40.65%。此外,为了进一步寻找碰撞原因,根据英国能源局关于船舶与平台碰撞数据库中的相关统计数据,1975―2001年10月31日期间共发生了557起事故,其中549起是由平台与工作船舶之间发生碰撞造成的。从上述统计数据可以看出,工程作业船舶是船舶与海上平台发生碰撞的主要肇事船型。
海上油气开发平台在建设、运营和维护的过程中,离不开各类工程作业船舶,而工程作业船舶在驶近海上平台,以及在海上平台附近作业的过程中,受到自然环境、人员操作、管理等因素的影响,存在与工程结构碰撞的风险。如何对此类风险进行科学的评估,并提出有针对性的风险控制方案,将风险控制在可接受范围内,成为海洋工程领域面临的关键问题之一。
针对这一问题,本文引入故障树的基本原理,构建作业船舶与海上平台碰撞概率预测故障树模型,将该问题分解为驶近过程中和作业过程中发生碰撞概率预测两个子问题,并逐步分解为若干基本事件的组合,将复杂问题逐步简化成多个简单问题,从而对碰撞概率进行预测。
1 国内外研究现状
目前该领域的研究大多集中在从工程作业船舶和海上平台的结构安全方面,利用船舶动力学原理[1]、海洋结构的有限元建模与仿真等方法[2],研究结构的安全性,为海上平台的设计提供理论依据,有关工程作业船舶与海上平台碰撞概率估算的研究较少。风险的大小是通过不利事件发生的可能性与事故后果的严重程度之乘积来衡量的,因此,估算碰撞的概率同样十分重要。
关于碰撞概率评估问题,最为常用的是船舶交通流理论[3]:根据离岸建筑物周围交通流的长期统计特征,获取船舶处于碰撞航向的概率,进而研究在不同海况下避碰失效的概率,将二者综合即可求得碰撞概率。该理论的一个重要前提是船舶交通流具有明显的统计特征,然而对于工程作业船舶来说,无论是船舶数量和工作频率,都不具备该特征,因此,需要一种全新的解决思路。例如,DAI等[4]提出一种服务船舶与海上风机碰撞风险评价基本框架,综合运用故障树(Fault Tree)、事件树(Event Tree)、贝叶斯网络(Bayesian Networks)等研究船舶与风机的碰撞概率,然而该研究成果是否适用于其他类型的海洋平台需要进一步论证。针对以上问题,本文在分析工程作业船舶航行和作业的基本特征的基础上,提出一种通用的、并且能够适用于工程作业船舶与海上平台的碰撞风险评估基本模型。
2 水上交通风险评价基本流程
不同领域的风险评价通常都会遵循某种固定的步骤,而在水上交通领域,最为常用的是国际海事组织(IMO)提出的综合安全评估(Formal Safety Assessment,FSA)。FSA已被公认为是目前水上安全评估的标准化程序,其基本步骤见图1。本文风险评估框架主要解决步骤1和2中的相关问题。
3 工程作业船舶与海上平台碰撞风险评估模型
3.1 故障树
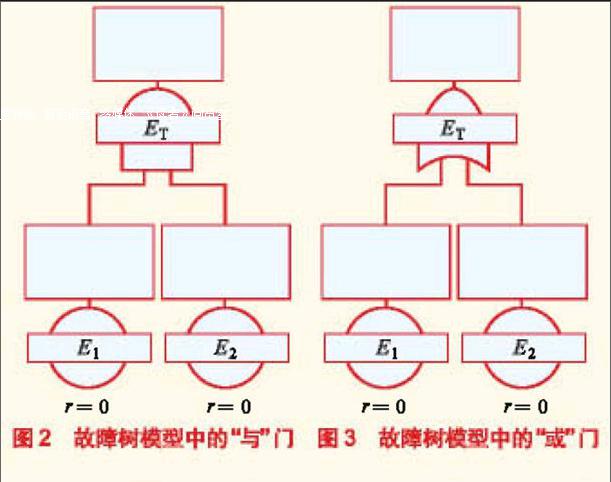
故障树分析法(Fault Tree Analysis,FTA)将某个不利事件的发生看作是由一系列简单事件发生共同作用造成的。将事故看作一个较为复杂的顶层复合事件,利用“与”“或”来描述简单事件之间的逻辑关系,再进一步根据预测简单事件发生的概率计算顶层事件发生的概率。“与”门和“或”门的基本原理见图2和图3,其中:ET(TOP EVENT)为顶层复合事件;E1(EVENT 1)和E2(EVENT 2)为基本事件,其发生概率可以根据历史数据或者相关领域专家的主观判断获得。
ET是否发生由事件E1和E2共同决定。对于“与”门来说,只有E1和E2同时发生,ET才会发生。因此,ET发生的概率为
=(1)
式中:表示顶层事件ET发生的概率;表示基本事件Ei发生的概率。
对于“或”门来说,两个底层事件只要有一个发生,ET就一定发生;因此,其发生概率为
=1- (2)
当顶层事件较为复杂时,可以将其分解为多个层级,且一个“与”和“或”门中可以存在多个子事件。假设故障树中有n个底事件 ,C为某些底事件的集合,当其中全部底事件都发生时,顶事件必然发生,则C为故障树的1个割集。若C是1个割集,且任意去掉其中1个底事件后就不再是割集,则C为最小割集。只要计算出所有最小割集中事件的发生概率,就可以求取顶层事件的发生概率。
3.2 工程作业船舶与海上平台碰撞故障树模型
利用故障树的基本模型,对工程作业船舶与海上平台碰撞风险进行建模研究。在建模前,应先对碰撞风险进行危险源识别,即找出导致碰撞的各个环节中的主要因素。工程作业船舶与海上平台的碰撞事故可能发生在船舶驶近平台过程中,也可能发生于船舶在平台附近作业的过程中,这两种碰撞类型的发生机理存在较大差异,其影响因素也有所区别。按照以上思路,构建工程作业船舶与海上平台碰撞发生概率的故障树模型(见图4),各个节点表示的意义和类型见表1,其中所有节点都存在是(Y)和否(N)两种状态。
由图4可知碰撞事故可能发生的路径,顶层事件是否发生由航行中是否发生碰撞和作业中是否发生碰撞决定。航行过程中的碰撞事故进一步取决于船舶是否处于碰撞航向以及监控设备是否检测到这一危险态势,后者为基本事件,而前者则进一步由瞭望失误和避碰失误两个基本事件共同决定。作业过程中的碰撞事故由船舶是否失控和是否遭遇大风浪两个因素决定,而船舶失控则由推进器故障和舵机故障两个基本事件决定。
根据故障树中的最小割集的概念,以及工程作业船舶与海上平台碰撞故障树模型中的基本逻辑关系,可以得到最小割集{x6,x5},{x7,x5},{x10},{x11},{x9}。
通过求取在每个最小割集中基本事件同时发生的概率,则所有割集发生的概率之和记为顶层复合事件的发生概率,即
Px1=Px6 €?Px5 + Px7 €?Px5 + Px10 + Px11 + Px9
(3)
从以上的模型可以看出,故障树模型的最大优势是可以将一个复杂事件发生概率的预测问题进行逐步分解,转化成若干个基本事件的组合,通过计算基本事件组合发生的概率获取复杂事件的发生概率。需要说明的是,式(3)中基本事件的发生概率因受到具体的海洋工程特征、作业船舶性能、操作人员技能和素质等因素的影响,需要具体问题具体分析。
4 结 语
本文在水上交通FSA的基本框架内,利用故障树的基本原理,研究了作业船舶与离岸建筑物的碰撞概率计算模型,利用故障树的“与”和“或”两个基本逻辑关系,将碰撞事件逐步分解为若干个能够根据历史数据或者相关领域专家的主观知识获取发生概率的基本事件,最后根据故障树结构获取的最小割集,集合计算碰撞发生的概率。该模型不同于传统的基于交通流的碰撞概率预测模型,其为碰撞风险评价提供一种全新的思路。
参考文献:
[1] 李润培,陈伟刚,顾永宁.船舶与海洋平台碰撞的动力响应分析[J]. 上海交通大学学报,1996,30(3):40-47.
[2] 欧进萍,段忠东,肖仪清.海洋平台结构安全评定[M].北京:科学出版社,2003.
[3]PEDERSEN P T.Collision and grounding mechanics[J].Proceedings of WEMT,1995(95):125-157.
[4] DAI L,EHLERS S,RAUSAND M,et al.Risk of collision between service vessels and offshore wind turbines[J].Reliability Engineering & System Safety,2013(109):18-31.
