五冗余捷联惯组最优配置设计①
2015-04-25武唯强
武唯强,陈 康,闫 杰
(西北工业大学 航天学院,西安 710072)
五冗余捷联惯组最优配置设计①
武唯强,陈 康,闫 杰
(西北工业大学 航天学院,西安 710072)
导航制导系统的高可靠性直接决定了固体运载火箭飞行任务完成的质量,而惯组冗余技术是目前提高系统可靠性的主要方式之一。文章以固体运载火箭导航系统中一种三正交两斜置的五冗余捷联惯组配置方式为对象,以导航性能指标最优为目标函数,构造了最优配置下的非线性矛盾方程组,采用最小二乘法求解得到最佳逼近解,得到五冗余捷联惯组的最优配置,并通过仿真进行了验证。结果表明,三正交两斜置的五冗余捷联惯组最优配置共有24组解,其全部解的导航性能指标均为1.424 3;当某个正交轴出现故障时,能够从斜置轴信息中重构出正交轴信息,以保证导航信息的准确性和精度,且导航误差在5倍陀螺器件自身误差当量之内。
冗余系统;捷联惯组;优化;配置
0 引言
惯性导航系统是利用陀螺仪和加速度计等惯性敏感元件在飞行器等载体内部测量载体相对惯性空间的位置、速度和姿态的自主式导航系统,在固体火箭及其他飞行器中有着广泛的应用。导航系统的高可靠性直接决定了飞行器飞行任务完成的质量,而冗余技术就是提高导航系统可靠性的最有效办法之一[1]。冗余技术按照工作方式可分为系统冗余与单元级冗余,由于单表冗余局部冗余可靠性提高明显,目前在惯导系统中的应用也最为广泛[2]。典型的冗余安装结构包括:(1)三三结构,由3个相同的非冗余正交配置的 IMU 子系统并行构成的冗余配置结构[3];(2)二自由度陀螺斜置配置,陀螺的自转轴分别垂直其4个侧面,相应的2个测量轴分布在侧面里,并沿侧面角平分线轴对称,这种结构保证了在相同数目二自由度陀螺构成的元件冗余系统中能达到最大的可靠度[3];(3)圆锥体结构,当传感器的数目大于或等于4个时(通常是5个或6个),将传感器按其测量轴沿圆锥母线均匀安装在一个固定圆锥角的圆锥面上[4];(4)六传感器正十二面体结构,将6个传感器的测量轴与正十二面体的平行面互相垂直[4]。对于不同的冗余配置结构,主要需要研究捷联惯导系统合理的冗余配置方法,分析不同配置情况下对系统导航性能精度的影响,保证系统在无故障和故障情况下都可稳定可靠的工作[5]。
本文主要针对一种应用在固体火箭系统中的三正交两斜置的冗余惯组系统进行研究,通过分析该类冗余系统在无故障模式和故障模式下的导航性能指标,推导出导航精度最高的最优配置方案,并通过仿真进行了验证。
1 五冗余捷联惯组配置方案
捷联惯性测量组合(捷联惯组)是固体运载火箭控制系统的重要箭上设备之一。通过合理的对惯性器件进行配置,箭载计算机采集惯组陀螺仪和加速度计输出,经过惯组冗余提供箭体坐标系的角速度和角加速度信息,进行姿态角、导航、制导计算。本文所研究的五冗余捷联惯组配置形式采用三正交轴及两斜置轴(各轴均配置1个陀螺仪和加速度计)的配置结构,具体安装方案如图1所示。

图1 三正交两斜置的配置方案Fig.1 Configuration model of the two orthogonaloblique solids
图1中g1、g2、g3、g4、g5为各轴安装的陀螺仪,a1、a2、a3、a4、a5为加速度计。其中,g1、g2、g3以及a1、a2、a3分别沿X、Y、Z三正交轴正向放置,g4、g5以及a4、a5沿任意方向的2个斜置轴放置。惯组坐标指向为X向前,Y向上,Z与X、Y遵从右手定则。图1中,各参数的定义如下:L、K分别为任意斜置放置的测量组件在XOZ平面上的投影线;α1、α2分别为从Y轴顺时针旋转至第四、五测量组件所在斜置轴的角度;β1、β2分别为从Z轴逆时针旋转至L、K的角度。
此时的配置矩阵为
(1)
2 最优配置结构设计
在冗余配置的捷联惯性导航系统中,惯组系统的输出方程为[6]
Z=Hω+ε
(2)
式中Z∈R3为待测量的导航信息;ω∈Rn为n个惯性器件的测量值(n≥3);H为惯导系统的测量矩阵;ε为零均值的高斯白噪声。
对于本文所研究的三正交两斜置五冗余捷联惯组系统,对其进行最优配置的目标是保证惯组系统在正常或故障情况下,均能保证导航精度最优。
2.1 无故障情况下导航性能指标分析
在对冗余配置进行优化设计时,可从3种导航性能指标进行分析。
假设量测噪声ε=(e1,e2,…,em)T,噪声中各分量是相互独立的随机常数,该种情况下,其导航性能指标为
(3)
其中
M=(HTH)-1HT
为测量噪声对3个坐标轴方向的影响程度。在此基础上,推广到含有加权因子的性能指标:
(4)
假设V是均值为零、方差为σ2的随机矢量,则性能指标为
(5)
式中ai为加权因子;G-1=HTH;G(i,i)是G的第i个对角线元素。
在惯性器件的测量精度一定的情况下,测量误差对正交轴的影响直接取决于(HTH)-1的大小。常用的是假设V是均值为零的高斯随机向量,可定义如下的性能指标:
(6)
当不考虑加权因子时,以上3种性能指标的优化条件是一致的[7]。如果冗余惯组的安装矩阵H能够使Fp的值最小,则由噪声所产生的导航误差最小,即惯组系统可获得最佳的导航性能。
2.2 故障情况下导航性能指标分析
由2.1节分析可知,配置方案的3种性能优化指标具有一致性,为统一标准,在本节中全部采用性能指标Fp1进行分析。
对于本文所研究的五冗余捷联惯组测量组件,在各轴器件均正常工作的情况下,性能指标函数为
当系统中的1组测量组件出现故障时,该指标函数不适用,需要进行改进。故当1组测量组件出现故障时,性能指标为
(7)
其中
最优配置结构不但要保证测量组件全部正常工作时的测量噪声对正交轴的误差影响最小,而且在出现故障的情况下,相应的性能指标也能达到最小。根据性能指标Fp1,只要指标函数式(7)达到最小,则此时的配置结构即为最优。
2.3 导航性能最优充要条件
由式(2)可知,H的每行分别是m个测量轴的方向余弦,则
tr(G-1)=tr(HTH)=m
(8)
记λ1、λ2、λ3分别是矩阵G-1的特征值,由于G-1是对称阵,因此存在正交矩阵P,使得:
PG-1PT=diag(λ1,λ2,λ3)
(9)
tr(G-1)=λ1+λ2+λ3=m
(10)
由式(9)可知:
(11)
因此,在优化条件(10)下,可得到Fp1最优时,对特征值的要求为
λi=m/3,i=1,2,3
(12)
此时,导航性能指标Fp1的值最小:
(13)
由上式可知,导航性能指标最优的充要条件为安装矩阵H满足:
G-1=(m/3)I
(14)
即H各列的模都是m/3,各列之间相互正交。

当λ1=λ2=λ3=n/3时,该不等式的等号成立,此时的导航性能指标J取极小值。因此,此时的安装矩阵H是导航性能指标最优的测量矩阵。
必要性证明:如果安装矩阵H的配置使导航性能最优,这意味着导航性能指标J最小。
已知:

且
trace(HHT)=λ1+λ2+λ3
则可得
λ1=λ2=λ3=n/3
(15)

(16)
可得:
(17)
2.4 最优配置解算
由以上对导航性能最优条件下最优配置的充分必要条件可知,对于本文所研究的三正交两斜置五表冗余系统,要达到最优配置,配置矩阵需满足以下关系:
(18)
此时得方程组:
(19)
该方程组为一矛盾方程组,将方程组(9)线性化为
A=sin2α1sin2β1
B=sin2α2sin2β2
C=cos2α1
D=cos2α2
E=sinα1cosα1sinβ1
F=sinα2cosα2sinβ2
G=sin2α1sinβ1cosβ1
H=sin2α2sinβ2cosβ2
M=sinα1cosα1cosβ1
N=sinα2cosα2cosβ2
则原方程组可化简为矩阵的形式:
aX=b
(20)
其中
分块矩阵:
a12=O3×4,a21=O2×6

这里,因为rank(a)=5,因此线性方程组aX=b是不相容的,传统的最小二乘法不能使用,这里采用改进方法求取不相容线性方程组的最佳逼近解[6]。
设V是欧氏空间,又x,y∈V,则x-y的长度|x-y|称为向量x与y的距离。
定义:设线性方程组AX=b(A=(aij)m×n,m>n,b=(b1,…,bm)T,x=(x1,x2,…,xn)T,xi∈R是不相容的,则满足AT(AX-b)=0…*的X称为AX=b的一个近似解[6]。
定理1[7]:凡满足(*)式的X必是不相容线性方程组AX=b的一个最佳逼近解。
定理2[7]:不相容方程AX=b必有唯一LNLS解,X=A+b(A+是A的M-P广义逆)。
求解线性方程组(10)可为
(21)
由于α1∈[0,π],α2∈[0,π],β1∈[-π,π],β2∈[-π,π],故方程组(21)的解为
α1=54.734 7°或α1=125.264 4°
α2=54.734 7°或α2=125.264 4°
β1=±45°或β1=±135°
β2=±45°或β2=±135°
将以上计算结果再次代入到方程组(19)中,那么会有24组配置结构,各配置结构下的导航性能指标如表1所示。
3 仿真验证
在得到五冗余捷联惯组的最优配置后,可通过故障模式下对各冗余轴进行导航信息重构的方式考核最优配置的正确性。
假定五冗余捷联惯组的正交轴X陀螺器件发生输出故障,故障类型为常值输出,故障从第20 s开始,通过最小二乘估计的方法从斜置轴测量值进行导航信息重构,重构方法为
(22)
式中Zi为其他4个惯组器件的输出信息。
此时,信息重构的估计均方误差为
(23)
仿真中使用的陀螺误差模型参数如表2所示。

表1 最优配置及性能指标Table 1 Optimal Configuration and performance index

表2 陀螺误差模型参数Table 2 Error parameter of the gyro
未发生故障和已经发生故障陀螺脉冲输出时间序列如图 2所示,经过信息重构正交轴X陀螺脉冲输出如图3所示。
由故障模式下重构的导航系统输出可看到,在最优配置模式下,当五冗余捷联惯组某个正交轴出现故障时,通过信息重构可由其他斜置轴的信息准确估计出故障轴的导航信息,且重构误差不大于5倍陀螺器件自身误差当量,从而保证导航系统的精度能满足固体火箭的制导控制要求。

(a)正常工作
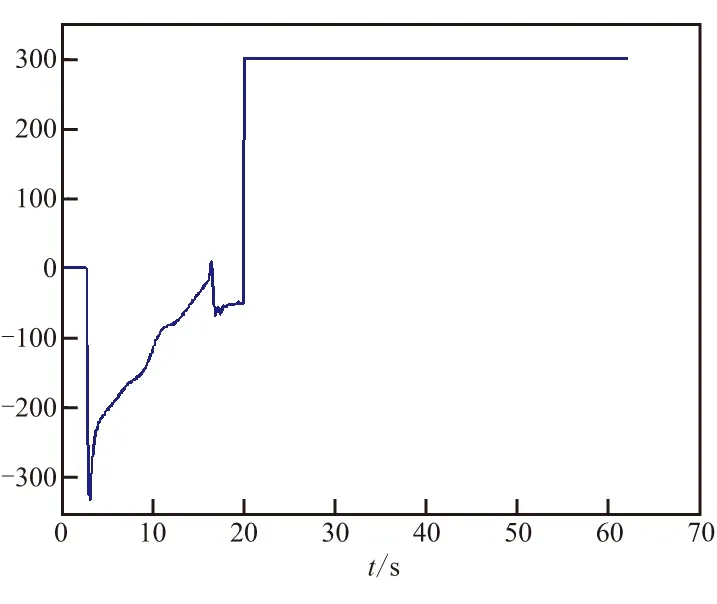
(b)故障模式

(a)输出结果
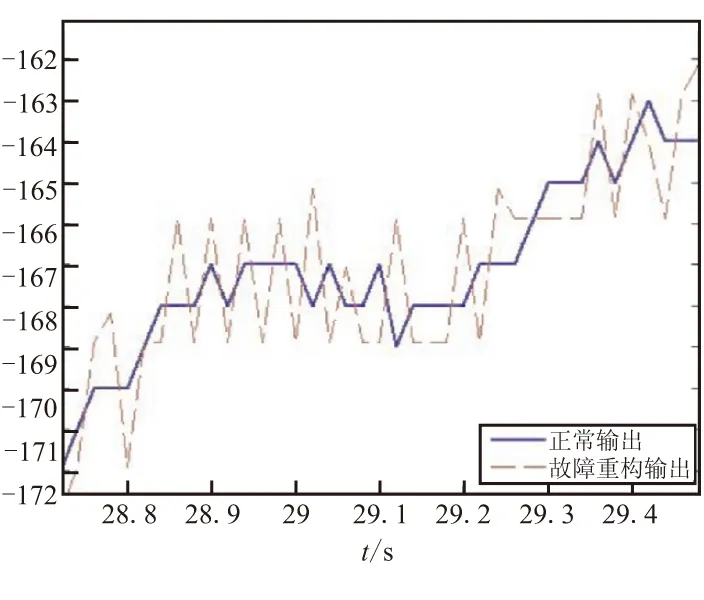
(b)局部放大
4 结论
(1)三正交两斜置冗余惯组系统存在最优逼近解,其最优配置形式有24种,均可保证在无故障和故障模式下的导航性能最优。
(2)当三正交两斜置冗余惯组正交轴出现故障时,可通过斜置轴重构出故障轴的导航信息,在最优配置模式下,导航精度小于5倍陀螺器件自身误差当量。
[1] 李雪莲,孙尧,莫宏伟.一种基于MIMU的九陀螺冗余配置[J].哈尔滨工业大学学报,2009,41(5):90-94.
[2] Daly K C,Gai E and Harrison J V Generalized likelihood test for FDI in rendundant sensor configurations[J].Journal of Guidance and Control,1979,2(2):9-17.
[3] Hirokimi S.Study on strapdown inertial navigation redundant sensor system[J].NALTR-660.1981-03.
[4] Harrison J V,Gai E G.Evaluating sensor orientantions for navigation performance and failureDetection[J].IEEE Transaction on Aerospace and Electronic System,1977,AES_13(6):631-643.
[5] 潘鸿飞,袁立群,任尚云,捷联惯导陀螺仪冗余配置研究[J].飞航导弹,2003(2):52-56.
[6] 李宏年,孙云刚,刘菁.不相容线性方程组的最小二乘解[J],青海大学学报(自然科学版),2002,20(1):49-50.
[7] Yuksel Y. Design and analysis of inertial navigation systems with skew redundant inertial sensors[D].Canada:University of Calgary,2011.
(编辑:吕耀辉)
Optimal configuration design of redundant strapdown inertial system with five axes
WU Wei-qiang,CHEN Kang,YAN Jie
(College of Astronautics,Northwestern Polytechnical University,Xi'an 710072,China)
High reliability of navigation and guidance system directly determines the quality for solid launch vehicles to accomplish flight missions,while redundant inertial measurement technology is one of the main ways to increasing the system reliability.In this paper,taking a redundant configuration of strapdown inertial system with five axes(three on the spindles and two on the oblique axis)applied in solid launch vehicles as the research object and optimization of navigation performance index as objective function,nonlinear contradiction equations under optimal configuration were derived and the optimal imminent solutions were calculated by least square method,then finally the optimal configuration for redundant strapdown inertial system was obtained,which was also verified by simulation.The results demonstrate that there are 24 solutions for the optimal configuration for redundant strapdown inertial system with five axes(three on the spindles and two on the oblique axis),all of which have a navigation performance index of 1.424 3 and when the fault happens in spindles,the configuration can reconstruct their information to ensure the accuracy and precision of navigation information with the navigation error within 5 times the error equivalence of gyro units.
redundancy system;strapdown inertial measurement unit;optimization;configuration
2014-05-21;
:2014-08-07。
中国航天科技集团公司航天支撑基金(2013-HT-XGD-15)。
武唯强(1971—),男,博士,研究方向为飞行器总体设计。E-mail:wangyinan@nwpu.edu.cn
V448
A
1006-2793(2015)01-0018-05
10.7673/j.issn.1006-2793.2015.01.004
