基于五帧差分法的动态目标检测新算法
2015-04-22郭春凤
郭 春 凤
(福建师范大学福清分校电子与信息工程学院, 福建 福清 350300)
基于五帧差分法的动态目标检测新算法
郭 春 凤
(福建师范大学福清分校电子与信息工程学院, 福建 福清 350300)
针对传统帧差分法检测准确率低且对光照变化敏感的问题,提出了改进的五帧差分的目标检测方法。首先将连续的五帧彩色图像转为灰度图,并进行高斯滤波和中值滤波除噪;然后将当前帧分别与前2帧、后2帧进行差分二值化运算;再将4个帧差分结果进行先“或”再“与”运算;通过形态学后处理检测出目标;最后引进一个新的综合指标H评估检测算法的优劣。实验结果表明,该算法能快速地检测出目标,能适应光照变化等复杂场景下的目标检测,具有较强的鲁棒性和较高的准确率。
五帧差分法; 复杂场景; 目标检测
目标检测一直是计算机视觉领域的研究热点,在自动监控、军队战斗、模拟现实和动态分析中都有广泛的应用前景[1]。目前常用的目标检测方法主要有:光流法、背景差分法、帧差分法[2]。光流法体现了三维场景及其平面投影丰富的动态信息,但其算法计算量大,需要特殊的硬件支持,对噪声比较敏感[3];背景差分法算法开销小、速度快,但此方法需依托稳健的背景模型,对于背景的扰动、光照的突变等极其敏感[4];帧差分法能适应静态和动态背景,无需提取和更新背景,时间复杂度低,但容易出现空洞和双影现象[5]。基于传统帧差分的改进,许多专家学者纷纷提出三帧差分、双向差分相乘、对称差分、区域差分、累积差分等。这些方法虽一定程度上改进了传统帧差分的一些不足,但仍受限于某些特定的场景,准确率低,鲁棒性不强。为此,文献[6]、[7]提出了五帧差分法,一定程度上减少了漏捡情况,然而,其目标仍存在部分空洞现象和边缘不够连续的问题。因此,本次研究提出了一种改进的五帧差分的目标检测新算法。改进的算法能快速地检测出目标,具有较高的准确率和较强的鲁棒性,能适应光照变化、背景扰动等复杂场景下的目标检测。
1 传统帧差分法
传统的帧差分法是通过计算相邻帧图像之间的变化量来获取动态目标的方法,其中尤以三帧差分法为经典。三帧差分法是在视频序列图像中,选取任意相邻的三帧图像Ht+1(x,y),Ht(x,y),Ht-1(x,y)
分别对前2帧和后2帧做帧差,然后阈值化如下:
(1)

(2)
对上述2个帧差图像阈值化的结果进行“与”运算,从而提取出目标图像:
Bt(x,y)=gt(x,y)⊗ht(x,y)
(3)
2 改进的五帧差分法
五帧差分法是基于传统三帧差分法而被提出的。三帧差分法虽然具有容易实现、时间复杂度低等优点,但是其目标轮廓往往表现为不连续,易出现很多的空洞[6],且对于光照变化或背景扰动等场景时,无法提取出完整的目标信息[7]。为解决以上问题,文献[6]、[7]均对三帧差分法加以改进,提出了五帧差分法:文献[6]的五帧差分法是取五帧连续图像中的中间帧分别与前2帧、后2帧进行差分,将4个帧差结果进行先“与”再“或”运算,一定程度上减少了漏捡情况,然而其目标边缘不连续;文献[7]的五帧差分法是通过先对五帧图像进行中值滤波,再将4个差分结果分2组分别进行取“与”和“异或”操作,再进行取“或”操作,最后取“与”运算。虽然克服了目标轮廓不连续的问题,但仍存在较多空洞现象,检测准确率不高。为此,本次研究提出一种改进的五帧差分新方法,其具体步骤主要有3步。
(1)选取相邻的5帧图像fk-2(x,y),fk-1(x,y),fk(x,y),fk+1(x,y),fk+2(x,y),分别将其转为相应的灰度图像,依次进行高斯滤波和中值滤波,去除高斯噪声和椒盐噪声,得到相应的5帧图像Ik-2(x,y),Ik-1(x,y),Ik(x,y),Ik+1(x,y),Ik+2(x,y)。
(2)以第K帧图像作为当前帧,分别与前2帧和后2帧进行帧差运算:
d1(x,y)=|Ik(x,y)-Ik-2(x,y)|
(4)
d2(x,y)=|Ik(x,y)-Ik-1(x,y)|
(5)
d3(x,y)=|Ik(x,y)-Ik+1(x,y)|
(6)
d4(x,y)=|Ik(x,y)-Ik+2(x,y)|
(7)
得到差分结果di(x,y)(i=1,2,3,4),分别进行二值化:
(8)
式中T为二值化阈值,取T=0.1。
为避免空洞现象,对上述二值化结果hi(x,y)分别进行“或”运算:
g14(x,y)=h1(x,y)⊕h4(x,y)
(9)
g23(x,y)=h2(x,y)⊕h3(x,y)
(10)
为克制“或”运算导致的目标重叠现象,对g14(x,y)、g23(x,y)进行“与”运算,得到第k帧图像的目标轮廓:
Bk(x,y)=g14(x,y)⊗g23(x,y)
(11)
(3)对得到的目标进行膨胀、腐蚀、填充等形态学后处理,以剔除噪声,减少空洞现象,使边缘轮廓更连续,目标区域更加显著。
3 实验结果对比
3.1 实验结果直观图
为验证改进的五帧差分法的有效性,选取不同场景的视频序列进行仿真测试。场景1为缓慢运动的行人视频SampleVideo.avi,场景2为快速运动的车辆视频car.avi,2个场景中均伴随有光照变化、背景扰动等复杂场景。实验硬件平台为Intel Core 2 Duo T6400 2.0 GHz 处理器,2 G内存,软件平台为Matlab 2010 b。
分别用三帧差分法、五帧差分法和改进的五帧差分法对同一场景的视频序列进行Matlab实验仿真,仿真对比结果如图1所示。
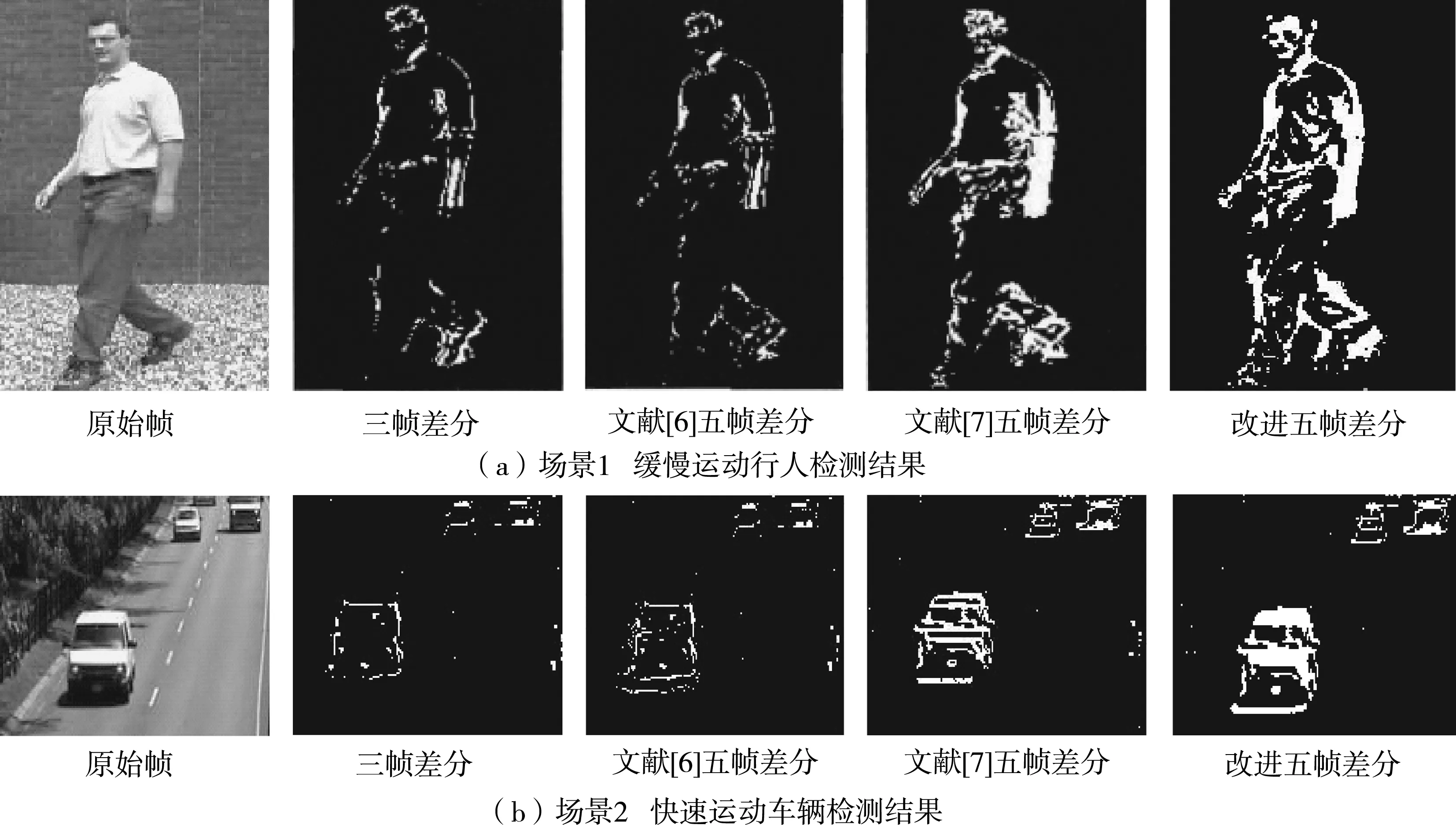
图1 不同算法对同一视频序列检测结果对比图
本次研究提出的改进的五帧差分法能适用于光照变化、背景扰动等复杂场景的目标检测。与三帧差分法、五帧差分法相比,该方法所获取的目标边缘更连续,目标轮廓更完整,空洞现象较少,目标信息更丰富,能为后续识别跟踪提供更好的数据。
3.2 实验结果量化分析
为更好地评价改进的五帧差分法的性能,对检测结果进行客观量化评估。在目前的许多文献中往往采用识别率η和误检率ξ2个指标来度量检测算法的准确率[7]。η和ξ定义如下:
(12)
(13)
式中:TP— 正确检测为前景的像素点数;
FN— 未被正确检测为前景的像素点数;
FP— 错误检测为前景的像素点数。
为保证较高的准确率,算法应同时达到较高的识别率和较低的误检率,然而识别率和误检率是相互关联的[8],鉴于目前没有一个综合指标来直观评估检测算法的准确率[9],因此通过引进一个新的综合指标H来评估目标检测算法的性能。当识别率η越高和误检率ξ越低时,H值越大。如果H值越大,则表明其检测准确率越高,H值定义如下:
(14)
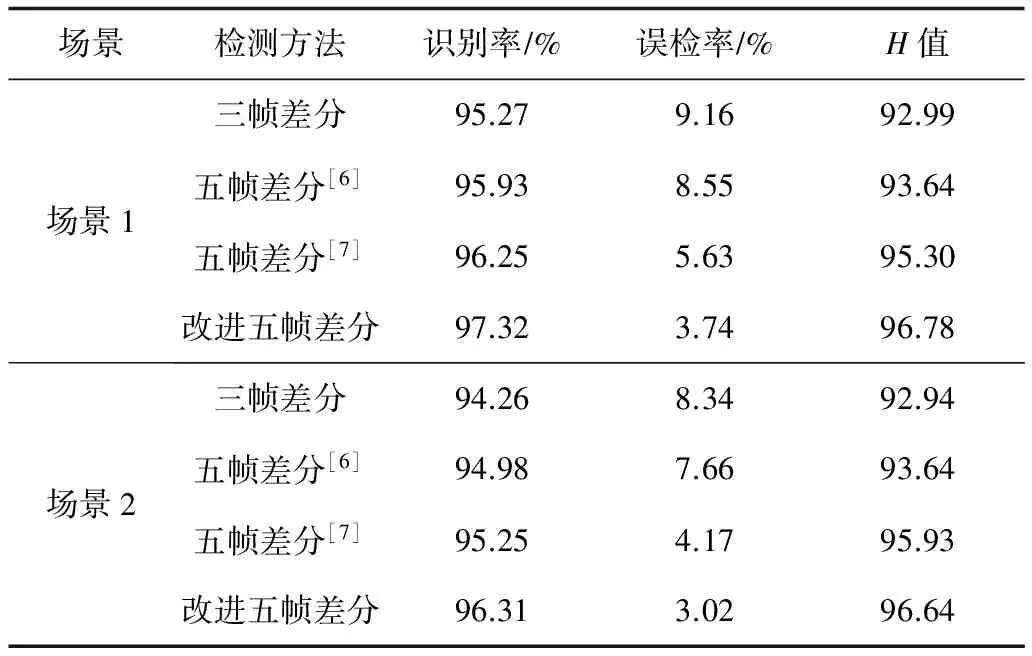
表1 传统帧差分方法与改进方法检测率对比结果
改进五帧差分算法的H值要高于传统三帧差分法和五帧差分法[6-7],准确率较高。这是因为采用了连续五帧的图像信息,比三帧差分具有更多的参考信息,具有较高的准确率。本次研究将当前帧分别与前2帧、后2帧得到的4个帧差分结果进行“或”运算,即先粗略提取差分中共同动态目标,避免了很多空洞现象,再“与”运算,则删除掉相邻图像的重叠部分,从而能提取出较为完整的目标轮廓,边缘更连续,目标信息更丰富,且处理速度能达20帧s,能满足实时性的需要。
4 结 语
为提高检测的准确率,利用连续的5帧图像进行运算,先将彩色图转为灰度图,并进行高斯滤波和中值滤波,然后将当前帧分别与前2帧、后2帧进行差分二值化运算,再将4个帧差分结果进行先“或”再“与”运算,最后进行形态学后运算,从而检测出目标。通过引进一个新的综合指标H对算法的好坏进行评估,综合考虑了算法识别率和误检率。结果表明,新算法具有较高的准确率和较强的鲁棒性,能快速地检测出目标,并能实时适应光照变化等复杂场景下的目标检测,对后续的识别分类、异常分析等具有一定的参考价值。
[1] 刘威.基于码书模型的动态背景建模及前景目标检测[D].天津:天津大学,2013:30-32.
[2] 王雯,陈丽,李晨,等.YUV空间下基于码本模型的视频运动目标检测方法[J].武汉大学学报(工学版),2015,48(3):412-416.
[3] 刘晓悦,孟妍.运动目标检测与跟踪算法的研究[J].河北联合大学学报(自然科学版),2015,37(1):65-69.
[4] 刘万军,李琳.基于熵理论改进混合高斯模型的运动目标检测算法[J].计算机应用研究,2015,32(7):1-6.
[5] 池利阳,李民政,吴新强.一种运动目标检测实时性和鲁棒性的方法[J].计算机应用与软件,2015,32(2):132-134.
[6] 舒欣,李东新,薛东伟.五帧差分和边缘检测的运动目标检测[J].计算机系统应用,2014,23(1):124-127.
[7] 陈志勇,彭力,张纪宽.动态环境下改进五帧差分的运动目标检测新算法[J].江南大学学报(自然科学版),2015,14(1):34-37.
[8]ShimadaA,NagaharaH,TaniguchiR.BackgroundModelingBasedonBidirectionalAnalysis[C]IEEE.ComputerVisionandPatternRecognition(CVPR), 2013IEEEConferenceon.[s.l.]:IEEE, 2013: 1979-1986.
[9]GolchinM,KhalidF,AbdullahLN,etal.ShadowDetectionUsingColorandEdgeInformation[J].JournalofComputerScience, 2013,9(11):52-62.
An Improved Algorithm Based on the Five Frame Difference Method for Dynamic Target Detection
GUOChunfeng
(College of Electronics and Information Engineering, Fuqing Branch of Fujian Normal University,Fuqing Fujian 350300, China)
In view of the problem of low detection accuracy and high sensitivity to illumination changes in the traditional method of adjacent frame difference, this paper proposes an improved method of five frame difference for target detection. Firstly, we could convert five consecutive RGB images to grayscale images, and utilize Gaussian filter and Median filter to filter the noise. Secondly, we can make the current frame minus the previous two frames and the next two frames separately, and do their binary operation. Thirdly, we could apply morphology to post-process the image. Finally, this paper introduces a new comprehensive index H to evaluate the algorithm of detection. Experimental results show that the proposed algorithm can quickly detect the moving target and adapt to the changing illumination in the complex scenario. Therefor, the improved algorithm has stronger robustness and higher accuracy.
five frame difference; complex scenario; target detection
2015-06-02
福建省自然科学基金项目“基于启发式算法的脑磁源定位”(2015J05146)
郭春凤(1988 — ),女,福建省永春人,硕士,助教,研究方向为图像处理、计算机视觉。
TP391.43
A
1673-1980(2015)05-0087-03
