三维空管自动化系统投影技术研究
2015-04-16苏志刚吴仁彪
苏志刚,聂 莹,吴仁彪
SU Zhigang1,2,NIE Ying2,WU Renbiao2
1.中国民航大学 中欧航空工程师学院,天津300300
2.中国民航大学 智能信号与图像处理天津市重点实验室,天津300300
1.Sino-European Institute of Aviation Engineering,Civil Aviation University of China,Tianjin 300300,China
2.Tianjin Key Laboratory for Advanced Signal Processing,Civil Aviation University of China,Tianjin 300300,China
1 引言
民用航空运输作为一种快捷安全的交通方式,得到世界各国的高度关注,世界各主要经济体的民用航空发展速度均高于其经济发展速度。为确保民航航空的安全性,地面管制人员需要全面掌握所关注空域内全部航班的动态信息及相应的管制信息,特别是在航班密集空域。为精细准确地确定飞行器在空间的位置,飞行器四维航迹(即用加入时间约束的三维空间坐标表示的飞行器航迹)的研究成为当前空中交通管理领域研究的热点问题,这也是实现新一代空中交通管理系统(NextGen,SESAR)的关键技术[1]。国内外围绕四维航迹的预测、规划、显示等技术展开了深入的研究[2-4]。2012 年2 月AirBus 公司完成从图卢兹到哥本哈根的全球首次基于四维航迹技术的试验飞行任务。
传统空管自动化系统采用二维平面综合显示地图辅助管制员了解空域内飞行器的动态信息,飞行器的高度信息由相应的标牌指示。然而,新一代空中交通管理系统中,为提高机场容量,采用持续下降进近或持续上升离场,传统的二维平面综合显示地图已经无法满足管理员对空域中飞行器高度变化的掌控[5]。基于三维地理信息的二维投影技术成为四维航迹的推荐显示方式。飞行器四维航迹的动态显示需利用三维地理信息搭建可投影到二维显示屏上的三维场景,其支撑技术为透视投影。20世纪初,透视基础理论的两个重大成果,Kruppa定理和Beskin 定理,揭示了透视投影问题的基本规律[6]。文献[7]给出Kruppa 定理的解析形式,随后,在此基础上从[7]射影几何角度完善了透视投影理论[8-10]。随着计算机图形学的发展,透视投影衍衍生出以物体坐标系、视点坐标系以及画面坐标系为基础的透视投影技术[11-13]。
以物体坐标系、视点坐标系以及画面坐标系为基础的透视投影技术,需要建立三个坐标系并且实现相互之间的转换,难以适用于空管自动化系统的显示要求。因此本文在透视投影的规律下,利用计算机图形基础建立三维地理坐标系与投影坐标系,利用坐标的旋转与几何关系,分别得到方位角、倾角以及视点、投影平面与地图基准面的相对位置对投影的影响因子,从而得到透视投影算法。并将所提出的透视投影算法应用于三维地图软件搭建的三维背景中,实现三维空间中飞行器标牌定位。
2 问题描述
空管自动化系统中飞行器的四维航迹显示平台利用三维地理信息数据,通过对三维空间的抽象描述,使系统平面位置综合显示器上的二维图像呈现出景深、透视度等三维显示特征[14-15]。通过三维空间观测方位、倾角的变化形成对关注空域不同方位、不同倾角的二维多视角显示[16]。空管自动化系统所采用的三维空间显示通常是基于两点透视投影形成的,即假设三维空间为一个长方体,投影平面与长方体的所有面相交,且至少与长方体的某一条边平行[17]。
以空管自动化系统中心O点的水平面ABCD作为地图基准面,并以此点为原点构建三维坐标系OXYZ,其中平面XOY与水平面ABCD重合。将基准面ABCD分别沿Z轴和X轴旋转角度α和φ,形成如图1 所示的三维投影结构。在图1 中平面X′O′Y′为投影平面,其与平面XOY平行,点P(0,0,zp) 为视点,三维空间中点V(xV,yV,zV)是点随基准面ABCD旋转后的 位 置。点Vp(x′V,y′V) 是 点V(xV,yV,zV) 在 投 影 平 面X′O′Y′ 上的投影点,且(x′V,y′V) 是该点在投影平面的坐标。
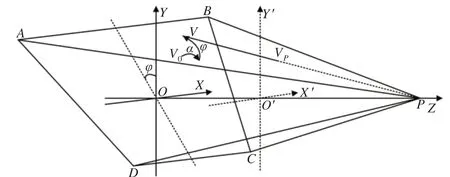
图1 三维地图投影示意图
基于上述假设,空管自动化系统中两点透视投影问题可以描述为点经过旋转后的点V(xV,yV,zV)在投影平面上的投影点Vp(x′V,y′V)的坐标获取问题。
3 旋转变换
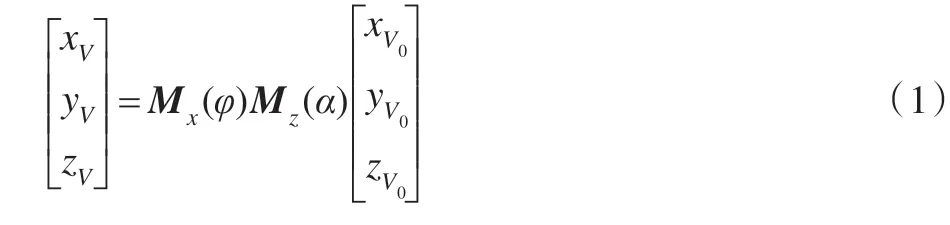
其中,Mz(α)为3×3 的方位旋转矩阵:

用于反映基准面ABCD绕Z轴旋转角度α的情况,Mx(φ)为3×3 的倾斜旋转矩阵:

用于反映基准面ABCD绕X轴旋转角度φ的情况。
4 投影变换
投影点Vp(x′V,y′V)与点V(xV,yV,zV)之间的关系如图2 所示。
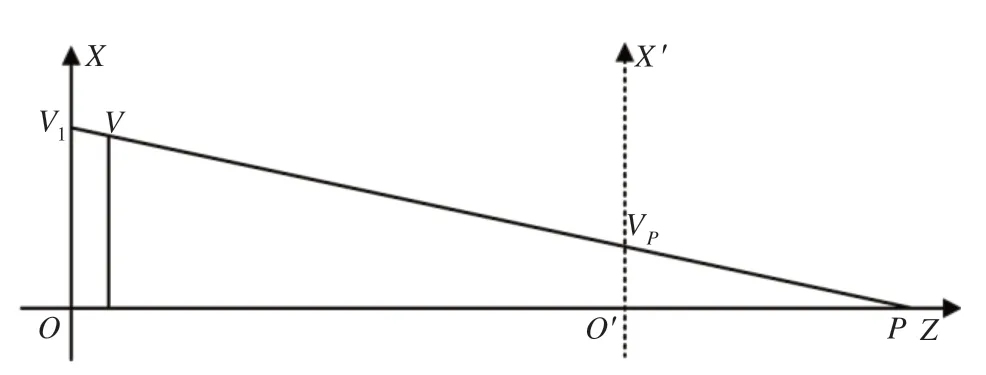
图2 XOZ 平面投影点与像点位置关系图
视点P(0,0,zp)经点V(xV,yV,zV)在平面XOY上的投影点,根据几何关系可得:
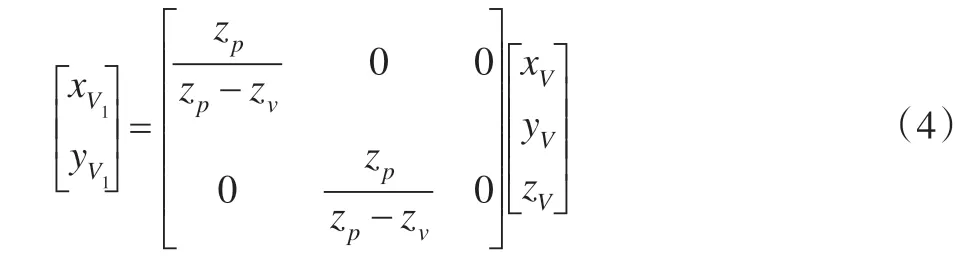
因为zp>>zv,式(4)可简化为:
由于空间信息在平面X′O′Y′上的投影是在平面XOY上投影的等比例缩放,所以假设缩放因子为k,则
定义

为投影矩阵,其反映了相应的三维空间向二维平面的投影关系。
5 透视投影
如前所述,空管自动化系统的三维空间通过旋转变换和投影变换形成二维图像显示,所获得的二维图像具有景深、透视度等三维特征。因此,当对空间进行旋转或缩放操作时,原空间坐标变换为投影面上投影点Vp(x′V,y′V)的过程由式(1)与式(6)所确定,即
根据参数α、φ及k可以控制三维空间点的投影点位置。
6 实验结果
本文利用三维地图软件Google Earth 构建三维空管自动化系统的显示平台,以天津空域飞机的位置信息作为投影映射的实验数据,验证本文提出的投影映射方法的有效性。
某一时刻天津空域内飞行器的分布情况如图3所示,所呈现的是传统空管自动化系统二维显示模式。飞行器标识旁显示内容为该飞行器对应的标牌,飞行器后的曲线为10 s内飞行器的历史位置轨迹。图中场景信息与飞行器位置信息由Google Earth 形成,而标牌位置由外挂系统根据飞行器三维位置信息变换的投影坐标决定。由图可见,标牌与相应飞行器的位置对应关系一致。

图3 传统显示模式下飞行器分布图
图4(a)与(b)为同一空域内,不同方位角及倾角下的飞行器显示情况。与图3 相比,图4(a)与(b)明显地呈现出透视度和景深等三维显示特征。由图4(a)与(b)可见,在非传统显示模式下利用本文算法所求得的标牌位置仍能与相应飞行器位置相匹配,说明本文方法可以有效解决三维场景的透视投影问题。
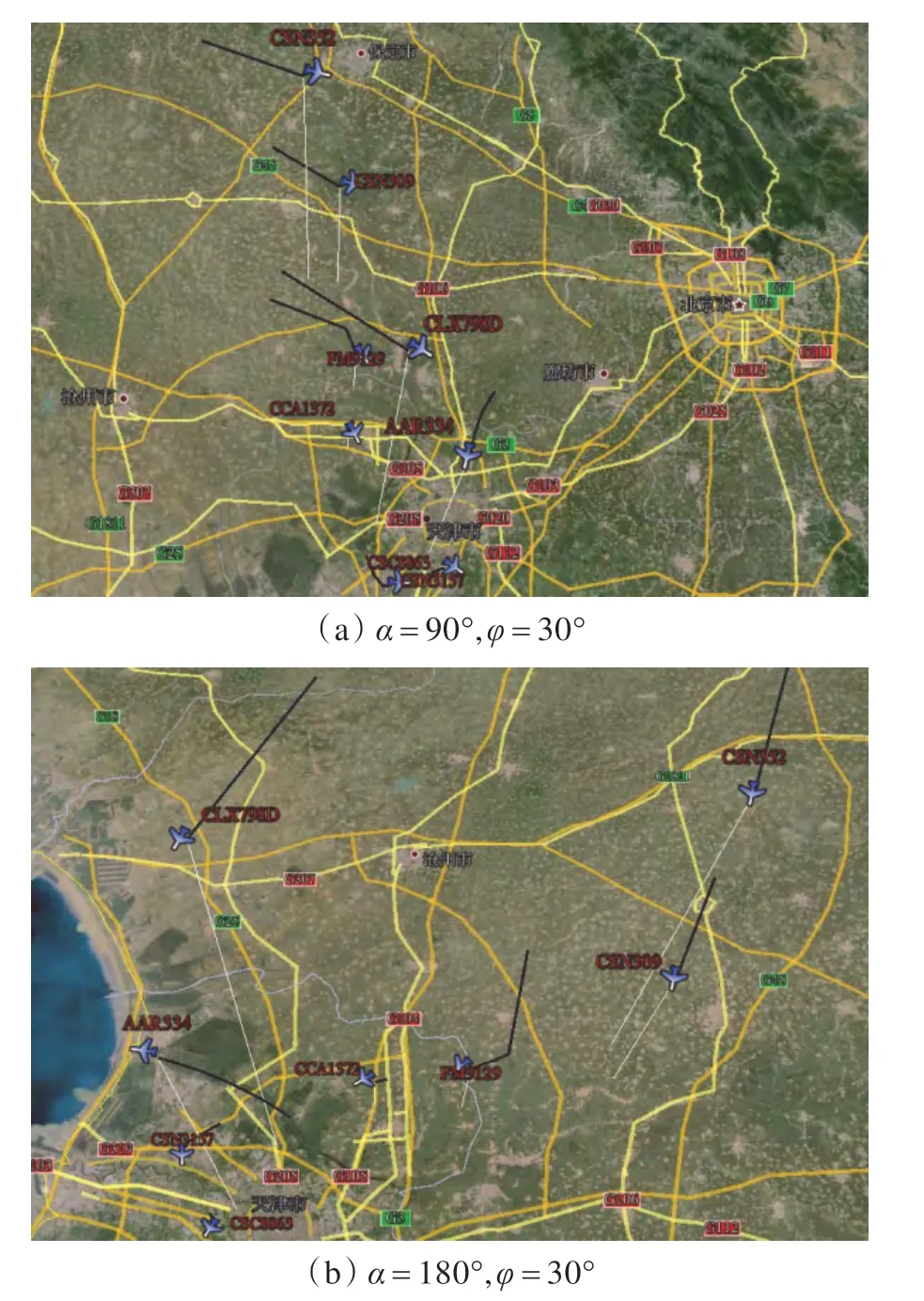
图4 不同视角下飞行器分布图
7 结论
依据空管自动化系统四维航迹有效显示的需求,针对三维空间向二维平面透视投影问题,给出适用于空管自动化系统三维显示特点的方位旋转矩阵、倾斜矩阵及投影矩阵。在基于三维地图软件Google Earth 构建的三维显示平台中,随着场景旋转与缩放,标牌与空域飞行器显示位置变化一致,表明本文所提出的透视投影算法可以有效地与第三方地图系统结合,实现三维透射投影的操控显示。
[1] van Marwijk B J A,Borst C,Mulder M,et al.Supporting 4D trajectory revisions on the flight deck:design of a human-machine interface[J].The International Journal of Aviation Psychology,2011,21(1):35-61.
[2] 张险峰,周其忠,王长青.基于航迹片段树的快速四维航迹规划方法[J].北京航空航天大学学报,2013,39(3):310-314.
[3] Porretta M,Dupuy M D,Schuster W,et al.Performance evaluation of a novel 4D trajectory prediction model for civil aircraft[J].The Journal of Navigation,2008,33(3):393-420.
[4] 曲玉玲,韩松臣.四维航迹同一进场航线碰撞风险模型[J].南京航空航天大学学报,2010,42(5):601-606.
[5] 吕小平.基于GNSS 的终端区精密进近系统应用分析[J].中国民用航空,2010,118:70-74.
[6] 陈谷新.论别斯金定理[J].北京农业工程大学学报,1990,10(3):89-95.
[7] Odaka S.Fundamental equation of perspective projeetion and its application[C]//Proceedings International Conference on Descriptive Geometry,1978:95-97.
[8] 赵正魁.三维到二维的射影变换与透视投影[J].工程图学学报,1991(2):8-14.
[9] 陈自强.透视投影研究[J].华东理工大学学报,2000,26(2):201-205.
[10] Guo Yang.A note on the number of solutions of the coplanar P4P problem[C]//Proceedings of the 12th International Conference on Control,Automation,Robotics& Vision,Guangzhou,China,5-7 December,2012.
[11] 吴迪,黄文骞,王莹.3维地形景观模拟中的透视投影变换[J].测绘通报,2003,49(6):27-28.
[12] 王渊,龙华,邵玉斌,等.一种图形透视投影矩阵的推导及编程实现[J].甘肃科学学报,2011,23(4):127-129.
[13] Hearn D,Baker M P,Carithers W R.Computer graphics with OpenGL[M].4th ed.Beijing:Publishing House of Electronics Industry,2005:303-382.
[14] Singh S P,Jain P K,Mandla Dr V R.Design and calibration of multi camera setup for virtual 3D city modeling[J].International Journal of Engineering Research & Technology,2013,2(5):1373-1376.
[15] Qulasvirta A,Estlander S,Nurminen A.Embodied Interaction with a 3D versus 2D mobile map[J].Personal and Ubiquitous Computing,2009,13(4):303-320.
[16] 任鹏,向南平,胡金星.多视角三维仿真城市地图的实现方法[J].地理与地理信息科学,2011,27(3):34-37.
[17] 杨燕燕,苟秉宸,于隋怀,等.基于透视反求的基本体素三维重构关键技术研究[J].计算机应用研究,2006,12(11):21-24.
