主动雷达导引头波形选择抗角反射器干扰方法研究
2015-04-11张荣文李彦鹏教亚飞
张荣文, 李彦鹏, 教亚飞
(国防科学技术大学电子科学与工程学院,长沙 410073)
0 引言
近年来,反辐射导弹导引头朝着加装主动雷达制导的方向发展,例如,美国“哈姆”系列的AGM-88E 和海军先进反辐射制导导弹(AARGM)上都加装主动毫米波雷达导引头,俄罗斯“平衡”中程反雷达导弹Kh-58 的改进型Kh-58A 也加装了毫米波主动雷达制导。角反射器干扰是雷达无源干扰的主要形式之一,在雷达站与反辐射导弹的电子对抗中,雷达站为了避免反辐射导弹主动制导带来的威胁,通常会在附近布置角反射器或者角反射器阵列。
鉴于此背景,为了反辐射主动式制导导弹能够精确打击目标,研究对抗角反射器干扰的技术已经十分必要。据现有资料,国外针对抗角反射器方法的系统化研究少之又少,而国内关于角反射器的特性研究以及战术应用已经比较完善,但是在抗角反射器干扰方面文献仍较少。文献[1]提出了将Krogager 极化分解算法用于舰船和角反射器阵列的鉴别,但为了获取目标的极化信息需要增加雷达系统的复杂度;文献[2]提出基于极化分解的舰船和角反射器鉴别方法,并分析了舰船和角反射器在极化回波上的特性差异;文献[3 -4]提出了一种基于微多普勒特征的海面角反射器干扰鉴别方法,并分析了它们的微动特性。
上述抗角反射器干扰方法有一定抗干扰效果,但是,雷达导引头提取目标或干扰的极化信息比较难,导致通过极化处理方式抗干扰的实用性受到影响。由于地面/海面强杂波在回波信号频谱会产生杂波谱,基于微多普勒特征的抗干扰方法效果也受到影响。因此,如何更加有效地抗角反射器干扰成为了公认的难题。本文着眼于自适应波形选择技术研究抗干扰方法,对同一目标而言,其在相同带宽不同雷达信号体制下产生的高分辨率一维距离像(High Resolution Range Profile,HRRP)不同。根据这个特性,雷达导引头在几种不同体制信号之间选择一种能够最大限度区分目标与干扰的信号。
本文首先分析了角反射器一维距离像特性,在此基础上,详细阐述了波形选择原理,给出了波形选择准则,随后对本文算法进行了仿真,仿真结果表明,本文方法具有一定的抗干扰效果。
1 角反射器一维距离像
作为一种典型的雷达无源干扰设备,角反射器通过产生强烈的雷达回波来达到干扰的目的。当雷达波束照射到角反射器时,电磁波会在角反射器面上产生镜面反射和多次反射,在HRRP 上体现为很强的峰值或者包络。角反射器对入射雷达信号的反射过程如图1 所示。
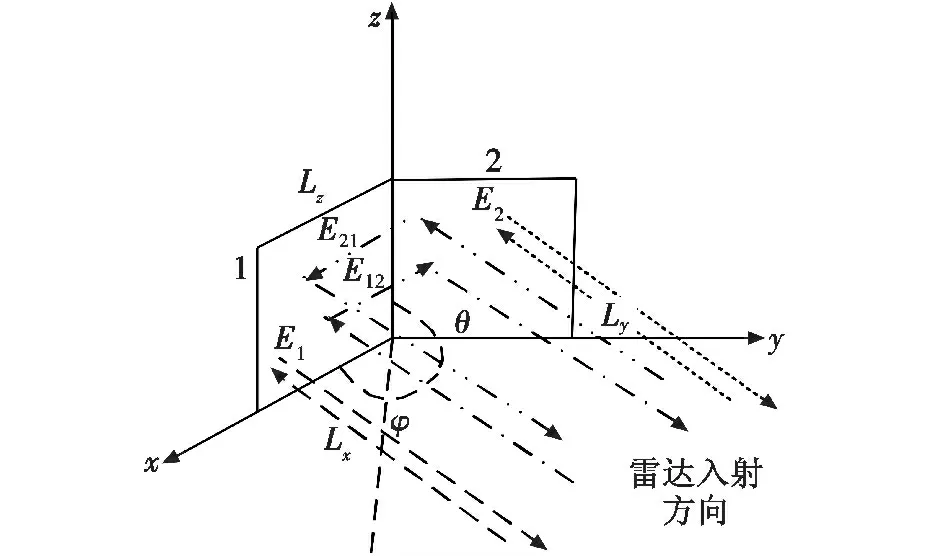
图1 二面角反射器对雷达波的反射示意图Fig.1 The reflection of a dihedral corner reflector
假设入射信号与反射信号在xy 平面,方位角0°≤φ≤90°,二面角反射器总的散射场可表示为[5]

式中:E1为平板1 的一次散射场;E2为平板2 的一次散射场;E12为平板1 反射到平板2 的二次散射;E21为平板2 反射到平板1 的二次散射。场分量可表示为
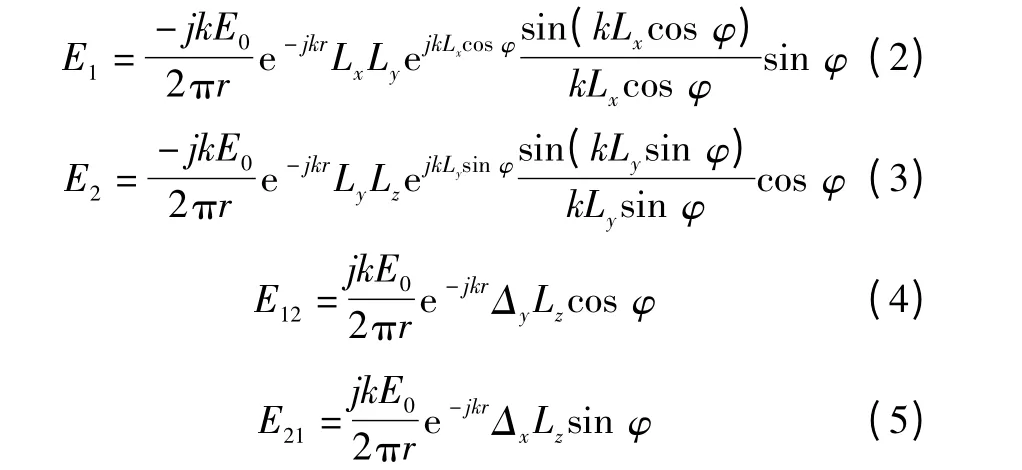
式中:E0为散射场强度;r 为径向距离;Lx为二面角的左半长度;Ly为二面角的右半长度;Lz为二面角的高度;Δx=min(Ly,Lxtan φ);Δy=min(Lx,Lycot φ)。
分别对E1,E2,E12,E21进行傅里叶变换得到散射场的冲激响应时域解析式分别为
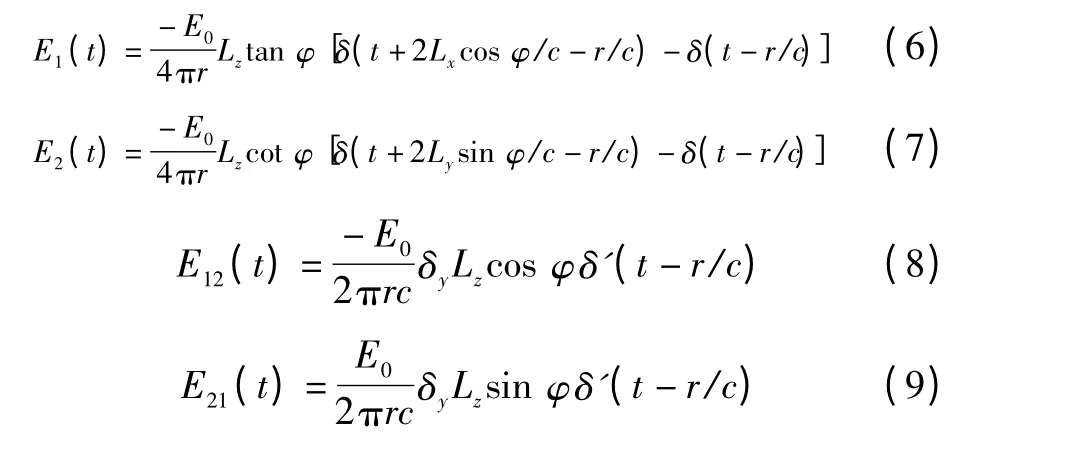
式中:c 为光速;δ 为冲激函数。
令入射信号为S(t),则总场的时域散射信号为

经过r/c 时间延迟后可表示为

则式(11)可化解为

式中,R(t)即为角反射器一维距离像,可表示为

式中:

式中:a2b(t),b2b(t)为二次反射对距离像的贡献,通过将式(3)、式(4)与入射信号S(t)进行卷积得到;为式(2)与入射信号卷积得到平板1 的一次反射对一维距离像的贡献;a12b(t),b12b(t)为平板2的一次反射对一维距离像的贡献。
2 波形选择原理与信息距离最大化准则
2.1 波形选择原理
雷达导引头探测目标时,可发射不同体制的信号,并获取目标(及角反射器)HRRP。通过计算目标与角反射器一维距离像之间的信息距离,确定信息距离最大的一种波形。后续工作中,将使用该类型波形实现相应场景下抗角反射器干扰的目的。波形选择抗干扰原理如图2 所示。
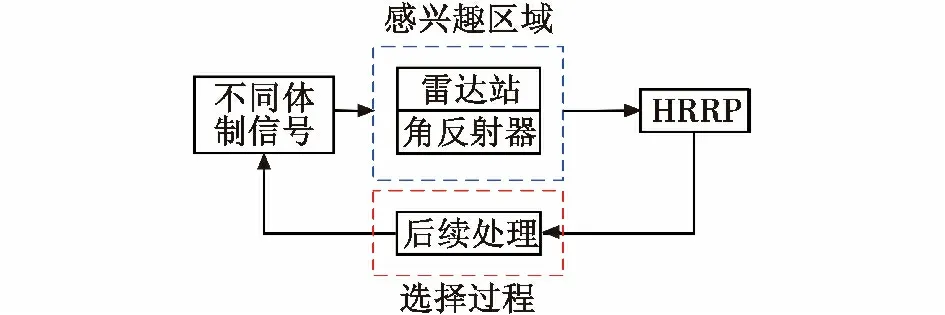
图2 波形选择抗干扰原理图Fig.2 The diagram of waveform selection anti-interference principle
需要指出的是,在本文中,信息距离是指不同目标(含干扰)之间一维距离像的差异。另外,波形选择中一个基本的前提是,雷达导引头发射的不同体制信号具有相同带宽,这样确保了不同波形体制下具有相同的距离分辨率。
2.2 信息距离最大化准则
本文以信息距离最大化作为波形选择准则。主要包括3 个方面:
1)给出HRRP 采样点的确定方法;
2)确定目标与干扰之间信息距离的计算方法;
3)给出波形选择准则中的优化函数。
首先确定距离波门大小d,并将其按照距离分辨单元Δr 的整数倍进行等间隔划分。如图3 所示,nΔr为距离单元的整数倍。本文取最小距离分辨单元作为划分间隔,将距离波门分为d/Δr 等份。在图3 中,虚线与HRRP 的交点[x(i),y(i)]即为计算目标与干扰之间信息距离时对HRRP[6-10]的采样位置。
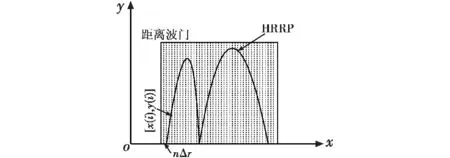
图3 距离波门划分Fig.3 The division scheme of the range gate
这里,信息距离可表示为HRRP 中目标与干扰对应采样点的高维距离。设雷达站(目标)在HRRP 中的采样点坐标为{[x1(1),y1(1)],[x1(2),y1(2)],…,[x1(n),y1(n)]};角反射器在HRRP 中采样点的坐标为{[x2(1),y2(1)],[x2(2),y2(2)],…,[x2(n),y2(n)]},则信息距离可表示为

适当选取距离门的大小,使目标与干扰分别处于距离波门的中间位置。对于3 种信号,选取的距离波门大小相同,则其采样位置也是相同的,因而采样点的个数也是相同的,则信息距离可简化为

令D1,D2,D3分别代表线性调频信号(Linear Frequency Modulation,LFM)、步进- 线性调频信号(Stepped-Frequency Linear Frequency Modulation,SF-LFM)、双 相移相键控信号(Binary Phase Shift Keying,BPSK)3 种信号体制下目标与干扰的信息距离,则最大信息距离定义为

3 仿真实验
3.1 仿真步骤
1)确定导引头雷达3 种信号体制分别为LFM,SF-LFM,BPSK 信号;
2)设定3 种信号的参数;
3)建立各功能模块模型;
4)在不同的干扰与抗干扰场景下验证本文算法,通过识别率验证本文算法的有效性。
①干扰设置。角反射器包括单个角反射器和角反射器阵列,角反射器边长定为1 m,角反射器阵列是将单个角反射器间隔一定的距离进行排列,目的是尽可能地达到与目标相当的尺寸;同时,角反射器与雷达站之间的间距可调。
②识别方法与识别率。采用线性分类器进行识别,识别率是正确识别次数除以总测试次数。
③交叉验证方法。在角反射器与雷达站间距不同的情况下,不同信号体制中目标与干扰信息距离变化程度可能不同,因此,改变目标与干扰间距d,计算不同信号的DM,通过DM确定相应场景下雷达发射信号。
3.2 雷达导引头目标搜索与数据设置
3.2.1 雷达导引头目标搜索
图4 为雷达导引头目标搜索示意图。
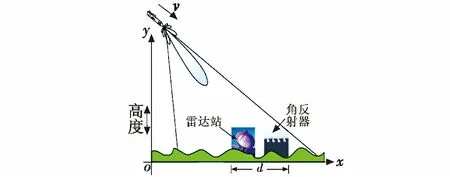
图4 雷达导引头目标搜索示意图Fig.4 Sketch of radar seeker in target searching
图中:v 为导弹速度;d 为角反射器与雷达站间距;雷达站与角反射器同处于雷达导引头波束内;雷达站与角反射器所在平面为xoy 面。由于距离分辨单元远小于目标的尺寸,通过对沿雷达视线上目标散射中心一维投影即可得到HRRP[11-12]。
3.2.2 数据设置
1)角反射器阵列情况下,3 种信号带宽均为150 MHz,目标与干扰之间的间距d 为250 m,把单个角反射器间距1 ~5 m 不等排列组成角反射器阵列。
2)单个角反射器情况下,3 种信号带宽均为150 MHz,目标与干扰之间的间距d 为250 m。
3)单个角反射器情况下,3 种信号带宽均为150 MHz,目标与干扰之间的间距d 为200 m。
3.3 仿真结果
1)目标与角反射器阵列一维距离像,如图5 所示。
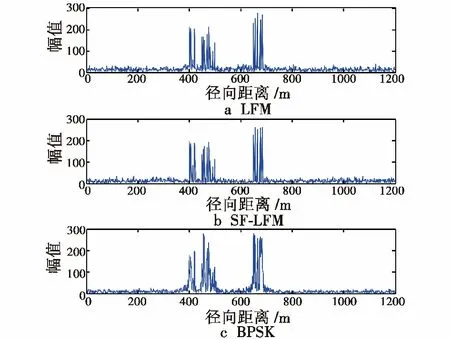
图5 3 种信号在角反射器阵列情况下的HRRPFig.5 HRRP of three kinds of signal in the case of corner reflector array
2)目标与单个角反射器一维距离像,如图6 所示。
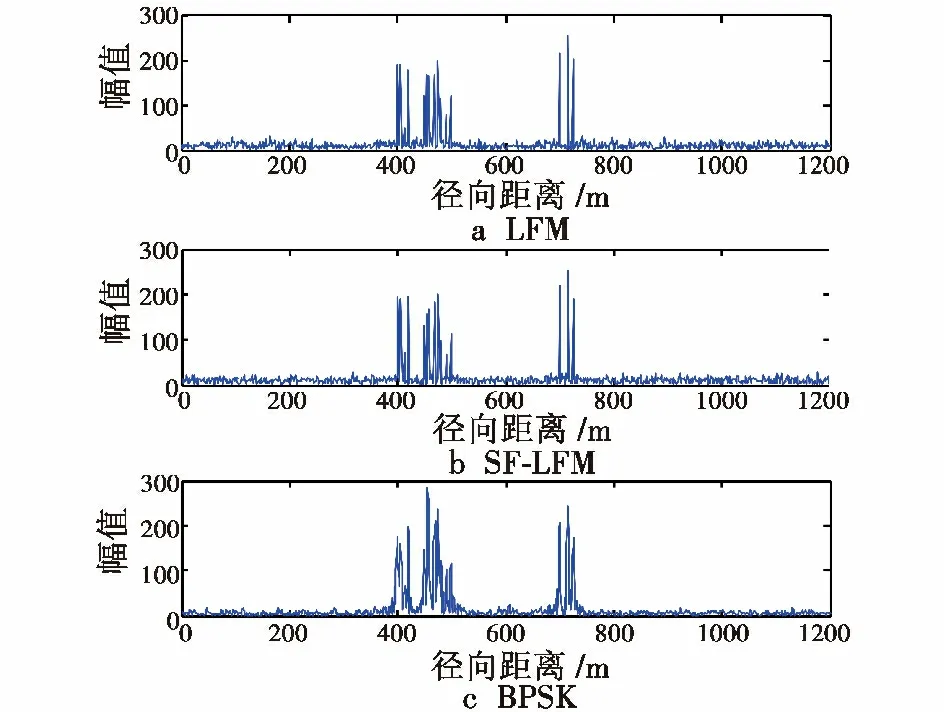
图6 3 种信号在单个角反射器情况下的HRRPFig.6 HRRP of three kinds of signal in a single corner reflector case
3)目标与单个角反射器在缩短距离d 情况下的一维距离像。如图7 所示。
表1、表2 分别为对应的信息距离和识别率,可以看出,当干扰为角反射器阵列时,SF-LFM 信号的信息距离最大,识别率最高;当干扰为单个角反射器时,LFM 信号的信息距离最大,识别率最高;在单个角反射器情况下,间距缩短50 m 时,BPSK 信号的信息距离最大,识别率最高。干扰从单个角反射器到角反射器阵列时,信息距离都有明显的增加。在单个角反射器情况下,间距缩短50 m 时,LFM 与SF-LFM 信号的信息距离减小,然而BPSK 信号的信息距离却增加了,其识别率也明显提高。从表1 与表2 对比中可以看出实验与理论预测是相符的。
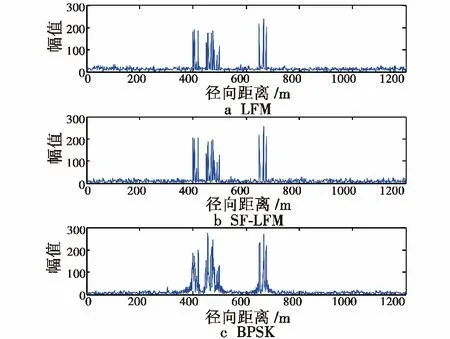
图7 3 种信号在缩短距离d 情况下的HRRPFig.7 HRRP of three kinds of signal in the case of shorter d
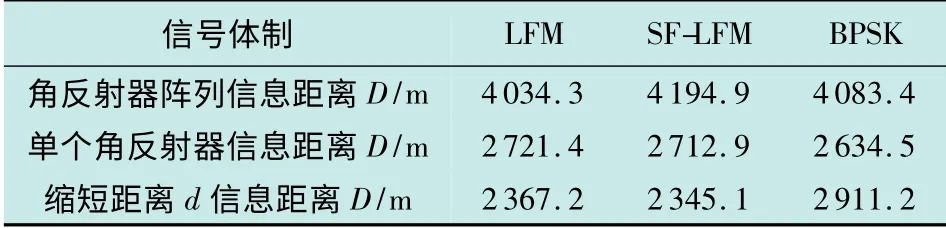
表1 3 种信号体制下的信息距离Table 1 Information of distance of three kinds of signal system
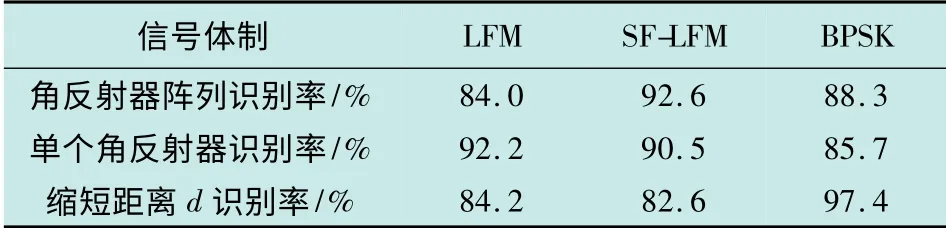
表2 识别率Table 2 Recognition rate
综上所述,在同一场景下,不同体制的信号区分目标与角反射器的能力有差异,雷达导引头在实际应用中选取信号的体制不同,则对抗干扰的效果也会不同,根据信息距离选取信号体制会起到一定的抗干扰效果。
4 结束语
本文针对无源干扰中典型的角反射器干扰,提出了一种波形选择抗角反射器干扰的新方法,该方法首先需要主动雷达导引头发射几种不同体制的信号,并得到感兴趣区域的HRRP,根据HRRP 中目标与干扰信息距离最大的原则来选择雷达导引头发射的波形,从而达到抗干扰的目的。本文的方法可以提供一种抗角反射器干扰的思路。根据仿真结果可以看出,在不同目标区域情况下识别结果不同,由于反辐射导弹主动雷达导引头在飞行过程中需要搜索目标,目标区域实际上是在不停变化的,通过不同波形带回的信息,更有利地锁定目标区域,从而选取最优波形进行抗干扰,因此,更加体现了波形选择的可行性。本文信息距离为高维欧氏距离,在以后的研究中也可以尝试如能量、范数方法等其他计算方法计算信息距离,并与本文方法的抗干扰效果进行比较。目前,本文方法处于理论与仿真研究阶段,后面将在实际应用系统中进行尝试。
[1] 涂建华,汤广富,肖怀铁,等.基于极化分解的抗角反射器干扰研究[J]. 雷达科学与技术,2009,7(2):85-90.(TU J H,TANG G F,XIAO H T,et al.A study of anti-corner reflector based on polarization decomposition[J].Radar Science and Technology,2009,7(2):85-90.)
[2] 朱珍珍,汤广富,程翥,等. 基于极化分解的舰船和角反射器鉴别方法[J].舰船电子对抗,2010,33(6):15-21.(ZHU Z Z,TANG G F,CHENG Z,et al.Discrimination method of ship and corner reflector based on polarization decomposition[J]. Ship Board Electronic Counter Measure,2010,33(6):15-21.)
[3] 黄孟俊,赵宏钟,付强,等.一种基于微多普勒特征的海面角反射器干扰鉴别方法[J]. 宇航学报,2012,33(10):1486-1491.(HUANG M J,ZHAO H Z,FU Q,et al.A sea corner jamming identification method based on micro-Doppler feature[J].Journal of Astronautics,2012,33(10):1486-1491.)
[4] 韩明华,袁乃昌. 基于物理光学方法二面角反射器一维距离像特征信号计算[J].国防科学技术大学学报,1999(5):66-68.(HAN M H,YUAN N C.Physical optics approximation to the range profile signature of a dihedral corner reflector[J].Journal of National University of Defense Technology,1999(5):66-68.)
[5] 付强,周剑雄,秦敬喜,等. 雷达目标散射中心模型反演及其在识别中的应用[J]. 系统工程与电子技术,2011,3(1):48-52. (FU Q,ZHOU J X,QIN J X,et al.Global scattering center model extraction and its application in radar target recognition[J]. Systems Engineering and Electronics,2011,3(1):48-52.)
[6] 张仲明,姜卫东,陈曾平.基于主分量分析的一维距离像雷达目标识别[J].电光与控制,2005,12(5):28-31.(ZHANG Z M,JIANG W D,CHEN Z P.Automatic radar target recognition based on PCA method using one-dimensional range profile[J]. Electronics Optics & Control,2005,12(5):28-31.)
[7] MOHAMED N J.Target signature using nonsinusoidal radar signals[J]. IEEE Transactions on Electromagnetic Compatibility(EMC),1993,35(4):457-465.
[8] MOHAMED N J.Target course recognition using non sinusoidal look-down radar[J].IEEE Transactions on Electromagnetic Compatibility(EMC),1994,36(2):117-127.
[9] 张仲明.基于高分辨一维距离像的雷达目标识别方法研究[D].长沙:国防科学技术大学,2004. (ZHANG Z M.Study on the algorithms of radar target recognition using high resolution range profiles[D].Changsha:National University of Defense Technology,2004.)
[10] 孟继成.雷达目标距离像识别研究[D].西安:西安电子科技大学,2005. (MENG J C.Study on recognition of radar target using range profiles[D].Xi'an:Xidian University,2005.)
[11] SHAW A K,VASHIST R L,WILLIANS R L.HRR-ATR using eigen templates with noisy observations in unknown target scenario[J].SPIE,2000,4053:467-478.
[12] 黄孟俊,陈建军,赵宏钟,等.海面角反射器干扰微多普勒建模与仿真[J]. 系统工程与电子技术,2012,34(9):1781-1787.(HUANG M J,CHEN J J,ZHAO H Z,et al. Micro-Doppler modeling and simulating of corner reflector in sea surface[J].Systems Engineering and Electronics,2012,34(9):1781-1787.)
