凹型端齿削弱永磁直线电机端部力波动方法
2015-04-06刘铁法夏加宽荆汝宝孙宜标
彭 兵 刘铁法 张 囡 夏加宽 荆汝宝 孙宜标
(沈阳工业大学电气工程学院 沈阳 110870)
凹型端齿削弱永磁直线电机端部力波动方法
彭 兵 刘铁法 张 囡 夏加宽 荆汝宝 孙宜标
(沈阳工业大学电气工程学院 沈阳 110870)
结合端面磁通函数和虚位移法推导PMLM端部效应产生的单端推力波动和法向力波动的解析表达式,揭示端部效应引起的推力波动和法向力波动的规律。通过对傅里叶级数的分析,提出反相位补偿原理的凹型端齿结构,该结构能消除推力波动和法向力波动的奇次谐波,解决传统的优化动子长度削弱推力波动但带来电机纵向“俯仰运动趋势”的缺点,同时还能消除动子横向“俯仰运动趋势”。最后以齿槽效应较弱的12槽11极PMLM为例,采用有限元仿真和实验验证,结果证明该方法能够削弱端部效应产生的法向力波动和推力波动。
永磁直线电机 端部效应 端部效应法向力波动 端部效应推力波动 凹型端齿
0 引言
气浮或磁浮的永磁直线电机直接驱动系统是高精密加工与高精密定位领域的主要发展方向之一,它要求直线电机具有优异的推力和法向力性能[1-4]。然而,永磁直线电机特有的纵向端部效应导致动子受到一定的法向力波动和推力波动(统称为端部力),影响了加工或定位精度。
国内外文献将齿槽效应和纵向端部效应产生的推力波动合称为detent force,而纵向端部效应detent force是推力波动的一个主要原因[5,6]。半无限长动子是分析端部detent force的经典模型,文献[5-8]均是基于该模型优化动子长度或端齿结构实现端部detent force的最小化,其中端部detent force的解析式是基于有限元仿真分析得出,缺乏严谨的数学模型和波动值的量化。等效磁网络模型是分析端部detent force的另外一个重要方法,文献[9,10]均是基于此模型的基础上,采用能量法预测端部detent force,得到减小端部detent force的合适的端齿形状,其端部detent force的解析表达式较复杂,难以预测端部detent force的特征。有导轨永磁直线电机动、定子之间强大的法向电磁吸引力一方面对负载平台的强度有较高要求,另一方面引起摩擦力的摄动,法向电磁吸力的平均力是单边平板型永磁直线电机研究的热点[11-14]。文献[15]指出齿槽效应和端部效应是引起法向力波动的主要原因,研究了齿槽法向力波动机理和磁极三段错位削弱齿槽法向力波动的方法,从控制的角度提出了分相补偿抑制端部效应引起的法向力波动,但未从电机本体设计上给出削弱端部法向力波动的方法。上述文献均未分析削弱推力波动的方法对法向力波动的影响规律。
端部效应是影响电机法向力波动和推力波动的一个重要原因,本文以短初级永磁直线电机为研究对象,首先利用端部边缘磁通函数和虚位移法推导出端部效应引起的法向力波动和推力波动的解析表达式,分析其主要谐波与电机长度参数的关系;然后从相位补偿角度分析错落结构端齿削弱端部力波动的原理,提出了“凹”型端齿结构;最后以12槽11极永磁直线电机为例,分别采用有限元仿真和实验验证该方法的有效性。
1 基于磁通函数的端部力解析分析
1.1 端部磁通函数
假设铁心磁导率为无穷大;永磁体的磁导率与空气相同;永磁体向外磁路提供的磁通为Φm。在无槽永磁直线电机中,永磁磁极发出的磁通可近似认为是一簇簇的同心圆(根据磁路最短原理,该封闭曲线实际为椭圆,见图1d)。当电机动子运行时,穿过初级电枢铁心纵向端面的磁通发生周期性变化。在x=0,如图1a位置时,次级的交轴q1与初级的左边缘重合,永磁体S1提供的一半磁通都穿过纵向端面边缘,此时,穿过初级电枢铁心左端面的磁通最大,最大值为Φ=Φm/2;随着动子的运行,穿过端面的磁通越来越少,在x=τ/2,如图1c位置时,穿过初级电枢铁心左端面的磁通为零,即Φ=0;当初级继续向右运动时,穿过初级电枢铁心左端面的磁通逐渐变大,当运行到x=τ,如图1d所示位置时,穿过初级电枢铁心左端面的磁通又变为最大,Φ=Φm/2。当动子继续向右运行时,又重复着上述的周期变化,可见初级电枢铁心左端面的磁通函数波长为极距τ。

图1 端部磁通示意图Fig.1 Schematic diagram of magnetic flux through the edge
由上述定性分析,结合有限元仿真,可得到穿过动子纵向端面的磁通曲线,如图2所示。
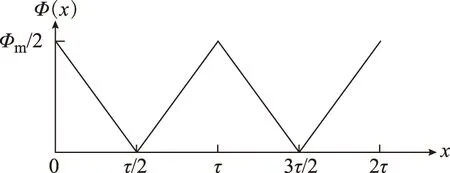
图2 纵向端部边缘磁通Φ(x)与x的近似关系Fig.2 Approximate relationship between Φ(x) and x
由图2可写出穿过纵向端面的磁通Φ(x)方程式
(1)
另外一端端面的磁通具有相似的变化规律,二者仅存在相位差,相位差取决于动子长度。设动子总长度为Ls,将(Ls+x)代入式(1)中,就可得到右端面的磁通方程。
1.2 端部力解析分析
由图1可看出,临近动子铁心左侧的磁极(图1a~图1c的S1,图1d的N2)产生的磁通穿过动子铁心纵向左侧端面,最终回到动子铁心下的磁极(图1a~图1c的N2,图1d的S2)中。随着动子位置的变化,穿过端面的磁通也发生了变化,等效认为磁极N2(或S2) 与动子铁心间的磁场储能发生了变化。根据电磁场知识可知,等效后的气隙磁场储能为
(2)
式中,B为磁感应强度;μ0为真空磁导率;Φ为穿过电枢铁心纵向端部的磁通;S等效为半个磁极包围的面积;δ为考虑开槽后的等效气隙长度。
1)端部效应法向力
根据虚位移原理可知,左端端部效应引起的法向力及波动为
(3)
式(3)傅里叶级数为
(4)
由式(4)可看出,端部效应引起的单端法向力不仅包含恒定的电磁吸引力,还包含所有次法向力谐波,各次谐波的波长为τ/n。
用(Ls+x)代替式(4)中的x,则得到电机动子右端部法向力。如果Ls=kτ,电机动子左、右端部法向力完全一致;如果Ls=kτ+τ/2,电机动子左、右端部法向波动力的奇次谐波反相位,偶次谐波同相位,将会造成动子纵向“俯仰运动趋势”。
2)端部效应推力
同样根据虚位移原理可得左端部效应引起的推力波动为
(5)
式(5)傅里叶级数为
(6)
由式(6)可看出,端部效应引起的单端推力波动包含所有次谐波,各次谐波的波长为τ/n。
用(Ls+x)代替式(6)中的x,则得到电机动子右端部所受推力。如果Ls=kτ,电机动子左、右端部所受推力完全一致,整个电机受到的推力波动为二者的波动之和;如果Ls=kτ+τ/2,电机动子左、右端部所受推力的奇次谐波反相位,偶次谐波同相位,将会消除奇次推力波动,只剩下偶次推力谐波,动子受到的推力波动幅值约为Ls=kτ电机的2倍。
2 凹型端齿削弱端部力波动
根据式(4)和式(6)可知,端部效应引起的单端推力波动和法向力波动的基波波长均为τ,二者相差90°电角度。法向力二次谐波的峰值仅为基波的1/4,推力二次谐波的峰值仅为基波的1/2,可见,如果能消除端部力的基波分量,将能极大的削弱法向力和推力的波动。
对于式(4)中任意次法向力谐波的表达式为
(7)
如果将纵向边端齿设计成如图3所示单级楼梯步结构,两个端面的宽度相等,错落尺寸为Δx,则第一部分端部效应产生的n次法向力FNLn1=FNLn,用x+Δx代替式(7)中的x得出第二部分端部效应产生的n次法向力表达式
(8)则电机动子单端受到的n次法向力的合力为FNLn1+FNLn2。由式(7)、式(8)可知,当2πnΔx/τ=π,即Δx=τ/2n时,两个错落端面受到的n次法向力的相位相差180°,得以相互抵消,其原理如图3所示。同理,该方法也抵消了n次推力谐波。当Δx=τ/2时,两个错落面端部力的奇次谐波相位均相反,仅剩下偶次谐波,法向力波动值约为传统端齿结构电机的1/4,单端推力波动约为1/2,单级楼梯步型端齿电机动子的推力波动幅值与传统端齿电机(动子长度为Ls=kτ+τ/2)基本相同。
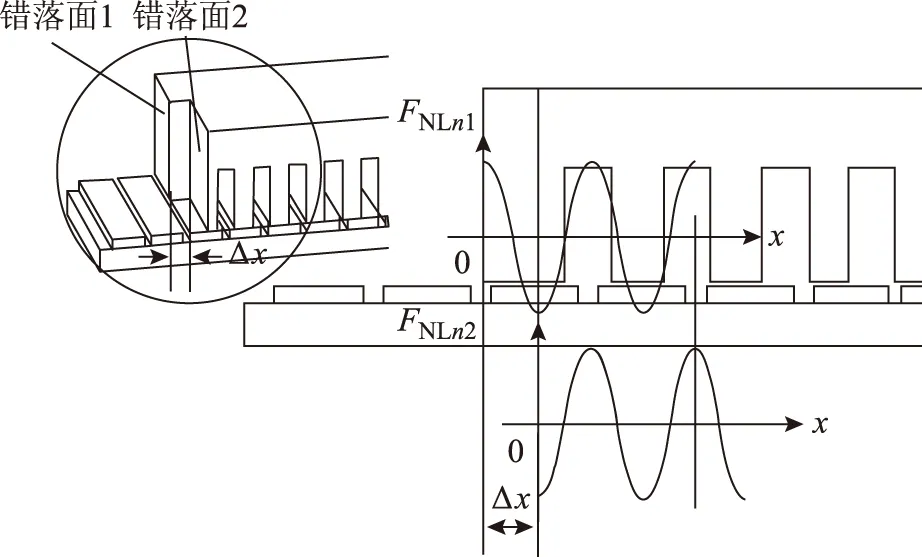
图3 单级楼梯步端齿法的原理图Fig.3 Schematic of single level staircase of end tooth method
这种单级楼梯步型端齿结构使得电机动子沿横向受到的法向力和推力不均等,引起电机横向“俯仰运动”趋势和推力纵向“拉扯”趋势。基于此,提出“凹”型端齿结构,边齿的中间凹入部分宽度是两侧凸出部分宽度的2倍,图4为采用“凹”型端齿结构的12槽11极PMLSM的三维模型及原理图。

图4 凹型端齿结构法Fig.4 Concave profile method of end tooth
由于端齿沿横向对称,“凹”型端齿结构法电机的动子能够在不发生横向“俯仰运动趋势”和推力纵向“拉扯趋势”情况下,消除n次端部力(包括法向力和推力)。
3 仿真与实验
本文以齿槽法向力波动较弱的12槽11极永磁直线电机为例验证“凹”型端齿结构削弱端部力波动的有效性,电机参数见表1。根据Δx=τ/2n可求出端部错落尺寸为Δx=8 mm,“凹”型端齿电机的动子长度Ls=192 mm。作为对比实验的非“凹”型端齿电机动子长度Ls=184 mm,Δx=0(工程应用中,为减小推力波动,传统端齿电机动子长度大多选为Ls=kτ+τ/2)。
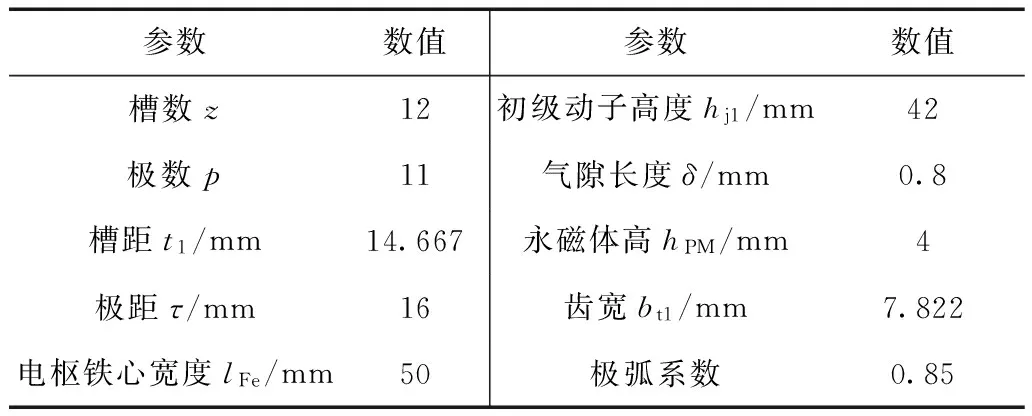
表1 电机参数Tab.1 Motor parameters
3.1 凹型端齿电机单端端部力波动的仿真分析
在仿真端部力时,采用了半无限长电机模型。图5a为一个动子右半无限长电机,可仿真左端部受力;同理可建立一个动子左半无限长电机仿真右端部受力。仿真时,动子向右运行,运行的距离为τ。仿真结果如图5b及图5c所示,仿真结果均滤除了恒定分量,包括后文的实验结果也作了同样处理。
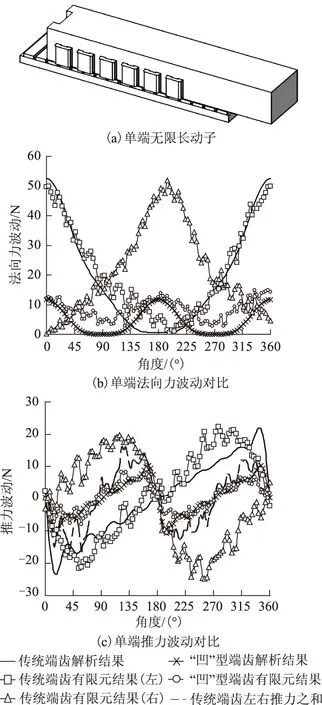
图5 单端端部力仿真结果Fig.5 Simulation results of the single end force
由图5可知,传统端齿电机法向力和推力波动主要次谐波分量的波长为τ,左端部的法向力和推力波动与右端部力波动相位相反,动子有纵向“俯仰运动趋势”,两个端部的推力波动之和的波形与“凹”型端齿电机单端推力波动一致,幅值约为其2倍,这与1.2节的解析结果一致。采用“凹”型端齿结构电机的单端法向力和推力波动主要次谐波分量的波长变为τ/2,法向力波动值约为传统端齿电机的1/4,单端的推力波动值约为传统端齿电机的1/2,两个端部受到的法向力和推力波动大小与相位基本相同(本文仿真只给出了一个端部力的波动波形),这与解析结果相一致,有限元仿真结果证明“凹”型端齿结构能有效消除单端端部力的主要次谐波,从而削弱了法向力和推力波动及动子有纵向“俯仰运动趋势”。对于“凹”型端齿电机不会因为引入“凹”型端齿而改变电机的气隙磁场和绕组因素,所以不会影响电机的平均推力。
3.2 “凹”型端齿结构电机的实验
永磁直线电机法向力波动和推力波动静态测试系统如图6所示。
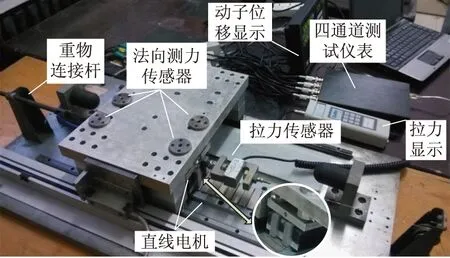
图6 端部力静态测试系统Fig.6 Static measurement system of the end force
该系统由检测与显示单元组成,检测与显示单元包括光栅尺、4个测量法向力的FC-WM微型拉力传感器及BVM-300-4M四通道拉力测试仪、一个测量推力的拉力计及数显拉力计表等。利用辅助安装装置将4个拉力传感器安装在工作台和电机动子之间,并调节预紧力;测量推力的拉力传感器安装在动子与进给装置之间。当调节进给装置带动动子在导轨上移动时,由光栅尺测量动子的相对位移,由数显表读出位移值。由拉力测试仪采集4个法向力传感器数据,由数显拉力计表读出推力波动值。
图7为采用“凹”型端齿结构前、后的实验对比结果。由图7a可知,“凹”型端齿结构电机的单端法向力波动的主要谐波波长为τ/2,而传统端齿电机为τ;“凹”型端齿结构电机单端的法向力波动幅值约为传统端齿电机的1/4,法向力波动被有效削弱,实验结果与理论分析一致。由图7b可知,动子长度Ls=kτ+τ/2=184 mm、△x=0的传统非“凹”型端齿电机与“凹”型端齿结构电机的推力波动基本一致;“凹”型端齿电机的整个动子受到的推力波动约为单端推力波动的2倍,实验结果与解析分析的波形趋势一致,进一步证明了所提出解析法的可靠性。
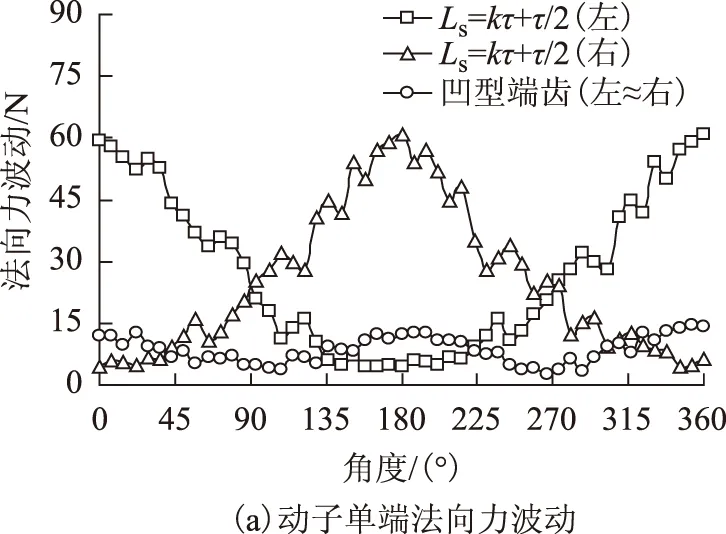
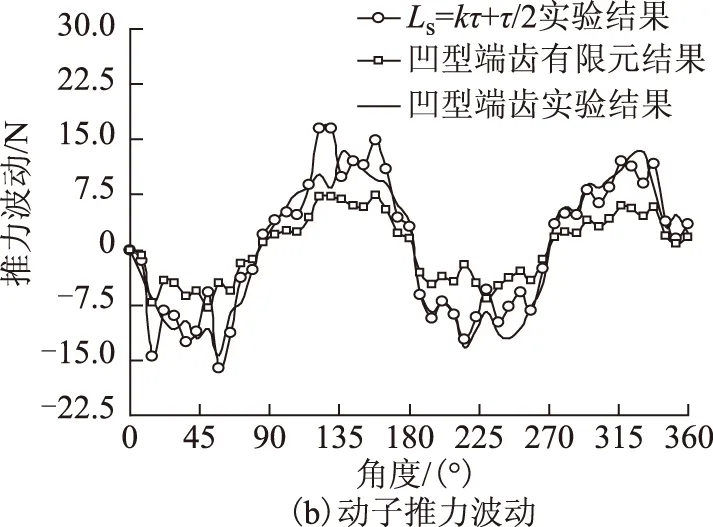
图7 端部力静态测试结果Fig.7 Static measurement results of the end force
4 结论
本文研究了永磁直线电机动子纵向端部磁通变化规律与单端法向力波动和推力波动之间的内在关系,提出“凹”型端齿结构削弱端部力波动的方法,通过解析分析、有限元仿真和实验验证,得出如下结论:
1)动子“凹”型端齿结构永磁直线电机相较于传统端齿电机,单端法向力主要谐波的次数提高了1倍,幅值约为传统端齿电机的1/4;单端推力主要谐波的次数也提高了1倍,幅值约为传统端齿电机的1/2。
2)“凹”型端齿结构永磁直线电机整个动子受到的推力波动为单端推力波动的2倍,与动子长度为Ls=kτ+τ/2电机的波动次数与波动幅值基本相同,但消除了Ls=kτ+τ/2电机的动子纵向“俯仰运动趋势”。
3)以一台12槽11极永磁直线电机为例,将解析结果与仿真结果及实验值相比较,前者与后两者的波形基本吻合,证明了解析计算与“凹”型端齿结构削弱端部力波动的可靠性和有效性。
[1] 李小平,李志科,陈学东,等.纳米精度运动台电机伺服参数校准方法研究[J].中国电机工程学报,2009,29(21):87-92. Li Xiaoping,Li Zhike,Chen Xuedong,et al.Calibration method for motor servo parameters of nano-precision motion stage[J].Proceedings of the CSEE,2009,29(21):87-92.
[2] Young-Man Choi,Dae-Gab Gweon.A high-precision dual-servo stage using halbach linear active magnetic bearings[J].IEEE/ASME Transactions on Mechatronics,2011,16(5):925-931.
[3] Owen R B,Maggiore M,Apkarian J.A high-precision,magnetically levitated positioning stage:toward contactless actuation for industrial manufacturing[J].IEEE Control Systems Magazine,2006,26(3):82-95.
[4] Li Hong,Zhou Yunfei,Shi Yangchun.Motion control for wafer stage of 0.1 μm lithography[C].IEEE International Conference on Integration Technology,Shenzhen,China,2007:338-342.
[5] Zhu Z Q,Xia Z P,Howe D,et al.Reduction of cogging force in slotless linear permanent magnet motors[J].IEE Proceedings Electric Power Applications,1997,144(4):277-282.
[6] Zhu Yu-wu,Lee Sang-Gun,Chung Koon-Seok,et al.Investigation of auxiliary poles design criteria on reduction of end effect of detent force for PMLSM[J].IEEE Transactions on Magnetics,2009,45(6):2863-2866.
[7] 徐月同,傅建中,陈子辰.永磁直线同步电机推力波动优化及实验研究[J].中国电机工程学报,2005,25(12):122-126. Xu Yuetong,Fu Jianzhong,Chen Zichen.Thrust ripple optimization and experiment for PMLSM[J].Proceedings of the CSEE,2005,25(12):122-126.
[8] 潘开林,傅建中,陈子辰.永磁直线同步电机的磁阻力分析及其最小化研究[J].中国电机工程学报,2004,24(4):112-115. Pan Kailin,Fu Jianzhong,Chen Zichen.Detent force analysis and reduction of PMLSM[J].Proceedings of the CSEE,2004,24(4):112-115.
[9] 王昊,张之敬,刘成颖.永磁直线同步电机定位力分析与实验研究[J].中国电机工程学报,2010,30(15):58-63. Wang Hao,Zhang Zhijing,Liu Chengying.Detent force analysis and experiment for permanent magnet linear synchronous motor[J].Proceedings of the CSEE,2010,30(15):58-63.
[10]Xu Xiaozhuo,Wang Xudong,Si Jikai,et al.Detent force analysis and optimization for vertical permanent-magnet linear synchronous motor with fractional-slot windings[J].Journal of Computers,2013,8(3):756-763.
[11]卢琴芬,张新敏,黄立人,等.错位式双边型永磁直线同步电机优化设计[J].电工技术学报,2013,28(11):35-41. Lu Qinfen,Zhang Xinmin,Huang Liren,et al.Optimal design of shifted type double-sided permanent magnet linear synchronous motors[J].Transactions of China Electrotechnical Society,2013,28(11):35-41.
[12]陆华才,江明,郭兴众,等.永磁直线同步电机推力波动约束[J].电工技术学报,2012,27(3):128-132. Lu Huacai,Jiang Ming,Guo Xingzhong,et al.Thrust ripple suppression for permanent magnet linear synchronous motor[J].Transactions of China Electrotechnical Society,2012,27(3):128-132.
[13]Profumo F,Tenconi A,Gianolio G.Design and realization of a PM linear synchronous motor with a very high thrust/normal force ratio[C].Industry Applications Conference,Chicago,USA,2001:1984-1988.
[14]Overboom T T,Smeets J P C,Jansen J W,et al.Semianalytical calculation of the torque in a linear permanent-magnet motor with finite yoke length[J].IEEE Transactions on Magnetics,2012,48(11):3575-3578.
[15]沈丽.高精度永磁直线伺服电机法向力波动分析与抑制方法研究[D].沈阳:沈阳工业大学,2014.
A Method for Reducing the End Effect Force Fluctuation by the Concave Profile End-tooth in Permanent Magnet Linear Motors
PengBingLiuTiefaZhangNanXiaJiakuanJingRubaoSunYibiao
(Electric Engineering Institute of Shenyang University of Technology Shenyang 110870 China)
Analytical expressions of the normal component and the thrust component of the end force are obtained by integrating the virtual displacement principle,which is described by the flux distribution on the longitudinal end face of the rotor.Through the analysis of the Fourier series,the concave profile end tooth structure considering the reverse phase compensation principle is put forward.The structure can eliminate the odd harmonic wave of the normal and thrust force fluctuations.It can also overcome the shortcomings of the traditional methods which lead to the motor’s longitudinal pitching movement trend by optimizing rotor length to reduce the thrust fluctuation.The rotor’s lateral pitching movement trend can be eliminated by the structure too.In the end,A 12 slots 11 poles PMLM with weaker slot effect is taken for example.The finite element simulation and experiment are employed,and the results show that the method can reduce the normal and thrust ripples of the end effect force.
Permanent magnet linear motor (PMLM),end effect,normal component of the end effect force,thrust component of the end effect force,concave profile end-tooth
国家自然科学基金(51377108),辽宁省高等学校创新团队项目(LT2013006)和国家科技重大专项子课题(2012ZX04001-011-003)资助项目。
2014-12-22 改稿日期2015-02-01
TM351
彭 兵 男,1975年生,博士,副教授,研究方向为永磁伺服电机的设计与控制。(通信作者)
刘铁法 男,1992年生,硕士研究生,研究方向为永磁伺服电机的设计与控制。
