北斗卫星导航系统在物流监控管理中的应用研究
2015-04-01滕志军张明儒许建军郭素阳
滕志军 张明儒 许建军 郭素阳
(东北电力大学信息工程学院,吉林 吉林 132012)
0 引言
2014 年12 月24 日下午,香港一辆运钞车驶经湾仔时,掉落3 箱现钞,银行损失约1 523 万港元。虽然部分好心人士已经上交捡到的钱款,但这给物流行业敲响了警钟。目前物流行业很少全程摄像,实时监控可以避免因意外而引起的纠纷[1]。另外,物品在运输过程中,物品的实时位置以及何时到达目的地也是客户十分关心的问题[2-3]。
当前我国导航系统主要依赖进口,2000 年建成北斗导航试验系统,使我国成为世界上第三个拥有自主卫星导航系统的国家,如今中国的卫星研究取得了阶段性成果,打破了依赖国外的局面[4-7]。北斗卫星导航系统是我国自主研发的,不会受到外国制约,具有较高的使用安全性,抗干扰能力较强[8-9]。与美国GPS应用领域相类似,该系统已成功应用于测绘、电信、水利、渔业、交通运输、森林防火、减灾救灾和公共安全等诸多领域,并产生显著的经济效益和社会效益[10]。随着我国经济不断发展,利用北斗卫星导航系统的优势和借助无线传感网络技术,将极大促进现代物流业更加智能化、信息化、人性化、多功能化和集成化[11-12]。
综上所述,本文提出选用我国自主研制的北斗卫星导航系统,采用嵌入式Linux 操作系统,利用Video4Linux 采集视频信息,使用高传输率的3G 无线通信模块,Qt 软件编写与Google Maps API 相结合,实现了视频采集、物流车辆定位、路径优化和轨迹回放等功能。
1 物流监控管理系统架构
物流监控系统主要由物流车载终端、3G 无线通信模块、远程监控中心三部分组成。物流车载终端由ARM 处理器、摄像头和北斗定位模块组成,实现物流车辆实时定位信息和视频信息的采集。3G 无线通信模块主要实现数据的传输,将接收到的定位信息和经JPEG 压缩的视频信息通过TCP/IP 传输到物流远程监控中心。物流远程监控中心主要由物流监控主机、物流管理主机、嵌入式综合监控平台和数据库组成,实现定位信息的显示和存储功能。物流监控系统架构图如图1 所示。
系统主要实现视频采集、物流车辆定位、路径优化和轨迹回放功能,系统功能结构如图2 所示。物流远程监控中心采用开源的面向对象的Qt 实现信息的显示。Qt 具有多线程、跨平台和可移植性等特点,支持所有重要的数据驱动,可以无缝连接数据库与Qt 应用程序,应用领域较广阔。
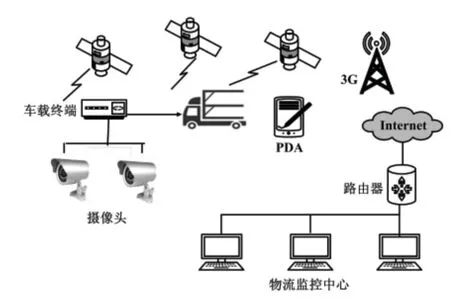
图1 物流监控系统架构图Fig.1 Logistics monitoring system architecture

图2 系统功能结构图Fig.2 System function block diagram
2 硬件设计
物流监控导航车载终端主要包括:地理信息采集系统(geographic information system,GIS)、ARM 微处理器模块、北斗卫星定位模块、3G 无线通信模块、视频采集模块和电源模块。物流车辆定位框架图如图3所示。

图3 物流车辆定位框架图Fig.3 Logistics vehicle positioning frames
北斗卫星定位模块通过串行接口UART2 与ARM微处理器模块进行通信,3G 无线通信模块通过串口UART1 与ARM 进行通信。
2.1 ARM 微处理器模块
ARM 微处理器模块选用友善之臂的Smart210 核心板,CPU 是Samsung S5PV210,基于CortexTM - A8,运行主频1 GHz;内置PowerVR SGX540 高性能图形引擎;支持流畅的2D/3D 图形加速;最高可支持1 080p@30 f/s 硬件解码视频流畅播放,格式可为MPEG4、H.263、H.264 等;最高可支持1 080p@30 f/s 硬件编码(Mpeg -2/VC1)视频输入;32 位数据线,512 MB DDRRAM。
2.2 北斗卫星定位模块
北斗卫星定位模块采用麦宏科技设计的UM220 -III N。UM220 - III N 采用片上芯片(system on chip,SOC),该芯片具有双系统、多频率、高性能、低成本、低功耗等优势,能够同时支持BD2 B1/GPS L1两个频点;可以在低功耗的情况下提供很高的灵敏度;能够在各种情况下选择适合的定位系统来方便自己定位。本模块包含地理信息系统(GIS)采集模块,物流运输车的实际位置信息都包含在帧$BDRMC 结构中,有固定的格式规范。该模块波特率为9 600 bit/s,数据位为8 bit,停止位为1 bit,无奇偶校验位,串口电压是TTL 低电平3.3 V。
2.3 3G 无线通信模块
3G 无线通信模块采用的是华为公司生产的MU509(UMTS/HSDPA 2 100 MHz GSM/GPRS/EDGE 850/900/1 800/1 900 MHz)通信模块,是双频宽带码分多址(WCDMA)工业级无线模块,支持3.6 Mbit/s下行速率;提供高质量的语音、短信功能,空中固件升级(FOTA)功能,内置TCP/IP 协议栈,以及华为扩展AT 命令集。MU509 有8 个wire UART,采用标准RS-232 串行接口,支持语音数据以及短消息(short message service,SMS)的接收、发送和对短信的管理,支持TCP/IP、PPP 通信协议。嵌入式ARM 微处理器可以借助3G 无线通信模块强大的数据传输功能实时地进行信息处理。MU509 的数据输入、输出接口实际上是一个串口,它可以与S3C2440 中的串口直接相连接,工作电压3.3 V。
2.4 电源模块
电源模块主要是通过电压变换电路将5 V 电压转变成3.3 V、1.8 V 和1.2 V 电压。系统使用LM1117 芯片将电压转换成3.3 V 和1.8 V,使用MAX8860EUA18芯片将5 V 电压转换成1.2 V 电压。
3 软件设计
3.1 视频采集流程
利用USB 摄像头采集行车视频信息,编译并加载Linux 自带视频设备的ov511 驱动程序,无需另外安装驱动,只需要在编译内核时加载进去。配置内核,使之支持USB,在device drive 中选择Multimedia device 下的Video for Linux,加载Video4lLnux 模块,在usb support 目录下选择support for usb 和usb camera ov511 support。利用Video4Linux 标准视频处理接口进行视频图像的采集,交叉编译JPEG 库移植到ARM 微处理器,从而实现对视频图像数据的JPEG 压缩,以减轻网络传输负担。实现图像的JPEG 压缩,需要对JPEG 编码库的交叉编译,下载JPEG src.v6b.tar.gz 的库,使用命令(#tar xvzf JPEG src. v6b. tar. gz)进行解压缩。图像截取采用双缓冲内存映射方式。
3.2 总体设计流程
系统实现流程主要包括:嵌入式开发环境的搭建、系统初始化、3G 模块和Internet 网络的建立、摄像头驱动移植、JPEG 库环境变量建立和移植、远程监控程序编写等。系统在嵌入式Linux 下完成驱动程序的编写和定位信息采集程序设计。软件设计流程图如图4所示。
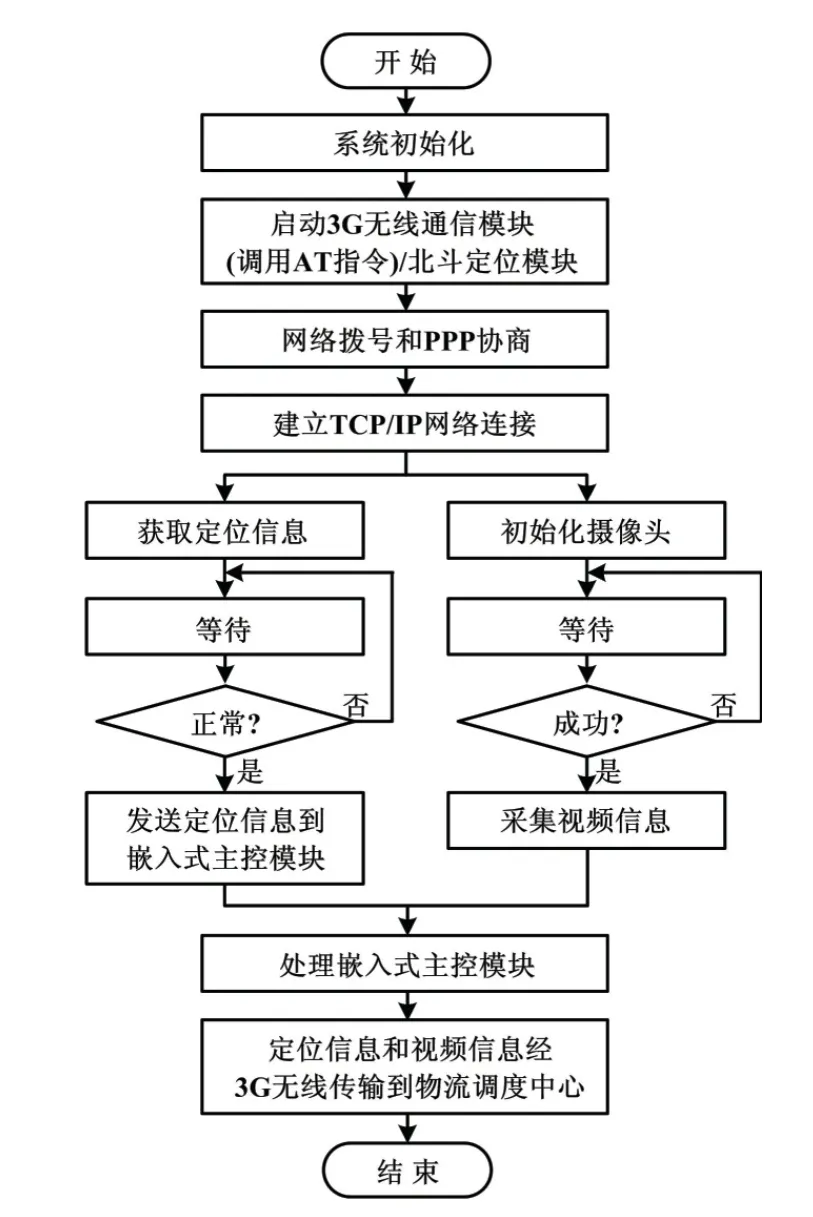
图4 软件设计流程图Fig.4 Software design flow diagram
北斗定位模块的软件程序主要由数据的接收、处理程序和发送程序构成。定位信息的获取采用中断方式。将定位信息保存在Buffer 缓冲器中,发送数据帧$BDRMC 到ARM 微处理器模块,其中帧$BDRMC 有固定的格式规范,自动截取有用的数据信息帧通过串口数据通信。
3G 模块主要是连接Internet 因特网,采用TCP/IP协议进行数据传输。3G 模块的启动和调用均是通过AT 指令来完成的。连接因特网络包括网络拨号和PPP 协商等过程。
视频采集模块主要包括视频设备的初始化、利用mmap()进行视频截取、处理采集的数据帧和JPEG 压缩等。其中,利用mmap 截取视频图像采用内存映射的方式。JPEG 压缩的流程包括设置用于保存图形信息的结构体、设置图像压缩品质和利用快速离散余弦变换压缩图像等。
Qt 软件设计主要是调用Google 提供的API 接口函数以及多线程(QThread)处理数据;使用Qt 下的QtWebKit 组件来显示电子地图;调用setUrl 函数创建系统主界面并显示程序的主窗口,最终实现定位信息和实时的视频信息的获取。
4 测试结果与分析
北斗定位导航系统借助谷歌实验室提供的Google Maps API 接口函数,在Qt 下实现物流车辆的定位信息的显示、全程摄像、轨迹记录等功能;调用函数和使用QtWebKit 组件来显示地图信息。接收到的数据信息通过串口助手进行调试,波特率选用115 200 bit/s,串口助手显示的数据帧为$BDRMC,110917. 000,A,4349.303811,N,12629.796641,E,0.472,166.581。系统软硬件设计和调试之后,北斗导航系统在教学楼附近进行测试。鉴于Qt 可以在Linux、Windows、Android等系统使用,本文选择具有代表性的Windows 系统进行显示。
Qt 界面上的定位信息和监控视频信息以10 s 时间间隔不断刷新,其中界面带绿色的为定位标志符号。经过多次测试该系统,系统稳定可靠。如果网络信号稳定,延时误差在3 ~12 s 之间,丢包率在0.1%以内;相反,在人群较为集中的地方或者阴雨天信号不稳时,延时误差和误报率较大,有时甚至接收不到信号。
5 结束语
针对物流跟踪不及时、车辆没有实时监控等问题,本文将我国自主研制的北斗卫星定位模块、高传输率的3G 无线通信模块和Linux 自带的视频驱动程序相结合,实现了视频采集、物流车辆定位、路径优化和轨迹回放等功能。另外对车辆线路进行优化,提高了物流运输的安全性和实时性。鉴于物流监控管理系统存在延时,下一步主要是降低系统的延时。
[1] 吴大中,宋俊飞.实验室智能监控系统设计[J].电子技术应用,2014,4(3):120 -122.
[2] 王肖楠,张兴波,李炳祥.基于GPRS 和基站定位的城市公交监控装置[J].电子技术应用,2013,39(2):39 -41.
[3] 袁浩浩,蒋联源,张联盟.基于WSN 的冷链物流监控溯源系统[J].网络与信息化,2014,33(6):369-378.
[4] Erickson A S. China's space development history:a comparison of the rocket and satellite sectors[J].Acta Astronautica,2014(103):142-167.
[5] 于浚烽,陈蔚芳,马万太.基于GIS /GPS 技术的肉品冷链物流监控与调度系统[J].计算机应用,2014,34(S1):312 -314.
[6] 杨殿阁,连小珉,张涛,等. 基于北斗卫星的车辆组合导航系统开发[J].清华大学学报:自然科学版,2008,48(5):856 -859.
[7] Huang Zechun .GPS vehicle positioning monitoring system integreted with COPS and mobile GIS[J]. Procedia Environmental Sciences,2011(10):2498-2504.
[8] 汪津,邬群勇,罗建平. 基于GIS/GPS/GPRS 的公共服务车辆监控系统研究[J].宁夏大学学报:自然科学版,2013,34(1):49 -53.
[9]周兵,陈向东,赵齐乐.北斗系统与GPS 应用比较分析[J].全球定位系统,2012,37(4):6 -8.
[10]Cai Ming.Road traffic noise mapping in Guangzhou using GIS and GPS[J].Applied Acoustics ,2015(87):94-102.
[11]李德库.电子商务环境下的物流管理创新[J]. 中国流通经济,2013(8):39 -43.
[12]Adrian E.Facilitating multimodal logistics and enabling information systems connectivity through wireless vehicular networks[J].Interational Journal of Production Economics,2009 (122 ):229-240.