一种基于空间网格的地物要素点云提取方法
2015-03-29孙森震卢小平杨尚波朱宁宁
孙森震,卢小平,杨尚波,朱宁宁,罗 玲
(1.河南理工大学 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作454003;2.河南省矿山空间信息技术重点实验室,河南 焦作454003)
激光扫描技术具有自动化程度高、获取数据快等优点,能够多角度地反映地物三维空间信息,目前 在三 维 城 市 建 模[1-2]、路 面 监 测[3]、电 力 杆 线 检测[4-5]、铁路勘察复测[6-7]、隧道监测[8]及大型钢结构建筑的变形监测[9]等领域已得到广泛应用。激光点云数据处理的关键步骤是目标点云的分类提取 提取结果直接影响到后续应用。点云分类提取方法目前主要有两类[10-12]:一是基于特定规则的单一滤波算法提取;二是用机器学习的方法进行监督分类。第一类方法针对性较强,但适用性较差;第二类方法分类结果依赖样本学习的质量,稳定性较差。因此研究具有普遍适用性的点云分类提取方法对点云处理软件的设计具有现实意义。
特定地物点云提取方法与其空间形状及其点云信息有关,本文根据三维数学形态学思想提出一种基于地形地物空间形态特征的点云分类提取方法。该方法首先通过场景空间网格数据组织,建立网格索引,划分网格空间;然后利用不同地物在网格空间中的分布特征设计出5种空间网格算子来提取目标点云,并通过调节空间算子的参数来提高提取算法的灵活性和适用性。结合CJHJ编程,通过对场景较为复杂的铁路地面Li DAR和城郊机载Li DAR数据中地物要素的提取,验证本文方法的适用性,为点云分类提取软件模块的设计提供一种实践方法。
1 基于空间网格的地物点云提取方法
1.1 地物要素点云分类提取流程设计
本文提取步骤如图1所示。
1)对原始点云数据进行拼接处理,统一坐标系,然后进行空间网格数据组织。
2)根据地物要素空间网格特征设置算子参数。
3)对提取结果进行目视判断并分析,如果得到待提取地物完整点云则通过,如果提取结果不明显,则适当调整相关的算子参数再进行提取分析。

图1 地物点云提取流程
1.2 场景空间网格数据组织
1.2.1 建立网格索引
激光点云数据量大且离散,大场景点云处理通常采用网格分块索引机制提高数据处理的效率。其主要思想是将点云投影到一个特定尺度的平面网格中,记录网格中点的编号,方便在处理时快速锁定搜寻点范围,减少盲目搜索耗费的时间。数据量过大时,不能将大量的点同时读入计算机内存,因此在点云数据预处理中要对大区域点云分为不同的区块来存储,并建立相应的索引,逐块进行处理以提高处理效率,如图2所示。也可自主设定网格范围大小,滤去扫描距离较远的点云。

图2 网格划分
1.2.2 划分空间网格
建立网格索引后,可以将网格区域[12]中的点视为分布在地理空间中的一个长方体内。根据网格区域点云地物的形状特征,给出如下定义:
定义1:长方体网格空间按一定尺度划分为一系列空间三维网格,称为网格空间。如图3所示,沿坐标轴XOY面内对应为i行,j列,按Z轴方向为k层。
定义2:如果一个空间网格中含有的点云数量大于阈值则将该空间网格标记为点云网格“实体”,否则视为“虚体”。
通过分析特征地物点云在网格空间中的“虚实”,设计出相应的空间算子来对目标地物点云分类提取。

图3 网格空间
1.3 特征地物空间网格特征分析
自然场景中的地物复杂多样,形态各异,大多数地物的空间网格特征并不明显,但是有一些地物的空间网格分布具有一定特征 例如 较为平坦的地面在空间场景中竖直方向上总是处在最下方;在地面上方的建筑物、树木、电杆等地物在竖直方向上表现一定的空间网格相续性特征。但是要区分出某种地物,必须找出与其他地物不同的空间网格特征。这就需要分析不同尺度下地物所具有的空间网格特征的差异,并据此设计出具有针对性的空间算子来提取特征地物。例如,电杆通常是孤立的存在,树木上方有树冠的特征,建筑墙体在空间中是面状存在的,悬空的电力线具有线性分布。
因此,空间算子的设计充分顾及网格的空间上下关系。针对一般地形地物特点,本文设计出5种空间算子,为空间网格邻域算子、空间密实性算子、区域密实性算子、高程连续性算子、线性特征算子等。
1.4 空间网格算子设计
1.4.1 空间网格邻域算子
定义:在划分的网格空间中选取5×5×5的空间网格为一个空间网格邻域算子单位,算子中心网格为算子核,核心网格为实体,其余网格为算子核的邻域空间。根据邻域空间中网格相对于算子核的位置设置不同的权重,以邻域网格的虚实为条件,计算算子的值。以算子值的大小决定算子核内的点云是否为目标点云,如果算子的值在阈值范围内则提取出中心网格内的点。
其数学表达如式(1)所示,Cqps表示邻域网格的虚实,虚为0,实为1;Pqps表示对应的空间邻域网格的权重;Vijk表示空间网格邻域算子的值。

根据提取对象的形状特征,设计算子权重Pqps,得出空间网格邻域算子值Vijk,通过分析特定空间网格邻域算子在不同地物中的值,可以区分不同的地物点云。本文将该算子用于建筑立面提取、地形滤波、电力线粗提取、噪声剔除。
1.4.2 空间密实性算子
定义:在网格空间中沿高程方向选取一竖列n个空间网格为一个空间密实性算子单位,算子中的空间网格值为Wijk,将其中的实体空间网格值赋为1,虚体空间网格值为0。令VCij为密度值表示该算子中实体个数的和,LDij为连续度表示实体和虚体的相邻的连续性,如式(2)、式(3)所示。


计算空间密实性算子的VDij,LDij值,根据地物空间形状特点可以识别杆状物、建筑立面、树冠等点云地物。
1.4.3 区域密实性算子
在空间密实性算子的基础上,将其组成一个5×5的区域空间密实性算子QMij。如果VDpq大于C1且LDpq大于C2,则Mij为1,否则为0。计算QMij的值如式(4)所示。通过记录其中每个算子的密实性,来判断区域网格的密实性。该算子主要用于树木、电杆的识别定位中。

1.4.4 区域高程连续性算子
由于建筑屋顶与地面形态特征相似,在提取建筑立面后,建筑屋顶被作为地形信息保留下来,但是这片区域悬在地形上空。根据这个特点,设计出一种检查区域网格空间高程方向连续性的算子。该算子沿高程方向,从下到上统计网格空间每层实体网格的个数,如果某层没有实体网格出现,则认为地形终止,以此分离建筑屋顶等悬空点云。
1.4.5 线性特征算子
电力线等线状地物在网格空间中,表现为连续的实体网格。将这些实体空间网格视为一个点,则利用Hough变换提取线特征原理[13],可以从网格空间中检测并提取符合线状特征的空间网格实体。
2 点云提取方法实例验证
2.1 铁路要素点云分类提取
本文使用RIEGL VZ-400扫描仪采用四站铁路点云数据,数据包含铁路轨道、路基、接触网、电杆及沿线建筑等地物,如图4(a)所示,因此在点云自动分类提取方法设计中要综合考虑地物的空间形态特征,合理安排各种地物要素的提取顺序。根据地形地物在网格空间中的分布特征,组合运用以上5种算子,将铁路沿线的建筑、树木、电杆等地物点云分类提取。
2.1.1 建筑立面的提取
根据墙面的空间网格特征,设置空间网格尺度为0.1 m。第一步,计算场景内网格的空间密实性算子VDij和LDij的值。以VDij大于25、LDij小于5为条件提取点云。然后,使用空间网格邻域算子,令其权Pijk值为1,计算第一步提取的点云的Vijk值 以Vijk大于20为条件 提取建筑立面 如图4 b 所示

图4 地面Li DAR点云提取
2.1.2 电杆的提取
电杆的特征比较明显,竖直方向连续,一般孤立存在且高度大于3 m。因此,第一步,计算场景内网格的空间密实性算子VDij和LDij的值。以VDij大于30、LDij小于3为条件提取点云,这时提取到的点云含有建筑立面等其他地物。第二步,计算区域密实性算子QMij,以QMij小于3为条件提取点云,其结果如图4(c)所示。
2.1.3 树木的提取
树木的形态比较复杂,不同的树木树冠的形状和大小均有差异。通常在提取场景中的地面、建筑、电杆等地物后剩余的点云为树木。一般情况提取到的树木不完整,在实验中提取了树木的树冠,如图4(d)所示。
2.1.4 铁路轨道电力线的提取
铁路沿线重要的监测对象为铁路路基轨道及接触网。由于接触网的高程特征比较容易提取,而轨道与路基连接紧密,其反射强度信息与局部路基反射强度信息相似,单纯利用形态学方法或者反射强度方法对其分类提取比较困难。
根据地面点处在网格空间最下层的特点,首先提取地面点云信息,其中包含轨道、路基信息。然后根据轨道与地面的反射强度信息差异对轨道点云进行粗提取。粗提取后的轨道点云包含许多离散的地面点信息,再次划分网格空间,根据轨道线性特征,利用线性特征算子对轨道精确提取,提取结果如图5(a)所示。
对于接触网点云信息,其具有线状悬空的特点,通过设计出特定的空间邻域算子,结合接触网的高程范围信息可粗提取具有线状特征的点云,然后运用线性特征算子剔除噪声信息,其结果如图5(b)所示。
2.2 机载Li DAR点云分类提取
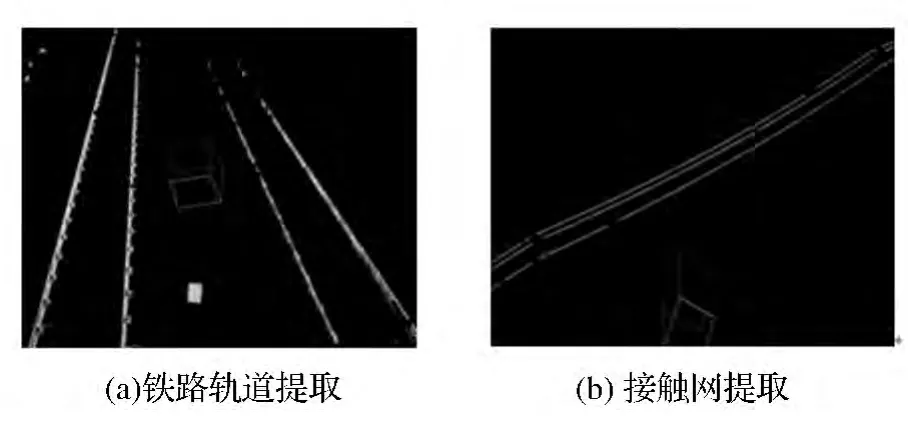
图5 铁路要素提取
机载Li DAR点云数据空间范围大,点云密度相对稀疏,其主要用于建立大区域的数字高程模型。本文选取500 m×500 m的城市郊区机载Li-DAR数据为实验对象,其中含有工业厂房、农田、林地等地物,点云数量约120万,如图6(a)所示。实验目的是分别提取地面点云和建筑屋顶点云,其过程如下:
第一步,设置网格尺度为0.3 m,使用区域密实性算子剔除树木点;
第二步,运用密实性算子剔除竖直方向上连续的点云,使地面与建筑屋顶分离;
第三步,运用区域高程连续性等算子,分离屋顶点云和地面点云。地面点云如图6(b)所示。用提取的建筑屋顶生成建筑模型,如图6(c)所示。
3 分类提取精度分析
3.1 分类精度的影响因素
点云分类提取结果的精度是衡量算法优劣的首要指标,其中包含分类提取的准确率和查全率。选择合理的分类方法能够提高提取的精度,但是由于点云数据的离散的特征和地物复杂邻接关系使分类提取精度的提高受到限制。本文方法提取的目标地物点云的精度与三种因素有关:①点云密度均匀性;②地物点云的形态特征的差异程度;③分类算子参数的设计的合理性。通过对地面点云铁路要素地物提取结果与实际地物比较,得出分类精度如表1所示。机载Li DAR点云中的建筑屋顶提取精度结果如表2所示。

图6 机载Li DAR点云提取
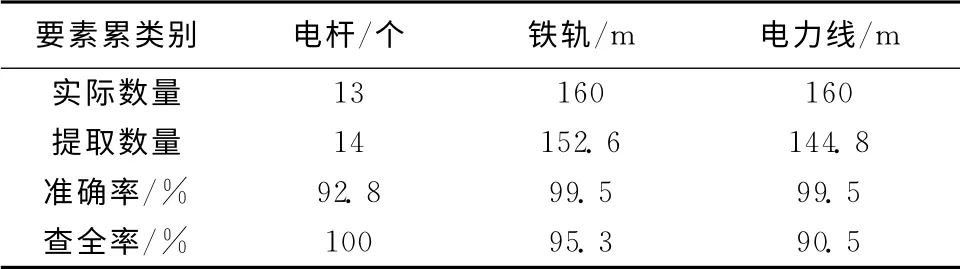
表1 铁路要素提取精度分析

表2 机载点云屋顶提取精度分析 m2
3.2 分类算法优缺点
本文分类提取算法设计主要基于点云地物的三维数学形态特征,其优点有:①算子的设计较为形象、具体、灵活,易于理解和模块化编程;②通过点云分块索引的建立提高算法的效率;③提取的结果精度较高,稳定性强。可以将算子参数保存,建立针对不同地物特点的算子库来增强算法的普遍适用性。其不足表现在,该算法程序执行需要使用较大的计算机内存空间,算子的设计需要一定的经验积累,在地物形态特征相似区域提取的准确率较低。
4 结束语
本文通过建立网格空间,根据地物要素在网格空间中的分布特征,设计出相应的空间分类算子,结合地物的反射强度差异,运用不同方法组合对地物点云进行提取。将算法编制为程序,通过对铁路地面Li DAR和郊区机载Li DAR数据的分类提取处理,验证算法的有效性。随着激光Li DAR硬件技术的发展,能够获取的目标物体的点云信息越来越多。本文分类提取方法的算子设计主要基于点云地物的三维数学形态特征,没有融合目标地物的图像信息和利用多回波信息,这是需要进一步研究的方向。
[1] 魏征,董震,李清泉,等.车载Li DAR点云中建筑物立面位置边界的自动提取[J].武汉大学学报:信息科学版,2012,37(11):1311-1315.
[2] 赫春晓,李浩.基于三维激光扫描数据的三维实景构建[J].测绘工程,2013,22(1):81-85
[3] 王果,崔希民,袁德宝,等.车载激光点云领域比较的道路边线提取方法[J].测绘通报,2012(9):55-57.
[4] 梁静,张继贤,刘正军.利用机载Li DAR点云数据提取电力线的研究[J].测绘通报,2012(7):17-20.
[5] 邹晓亮,于英,张永生,等.基于车载激光扫描数据的电线杆自动识别与定位[J].测绘科学,2012,37(2):91-93.
[6] 王晓凯.车载激光雷达在铁路复测中的应用探讨[J].铁道建筑,2013(2):81-83.
[7] 李建强.地面激光扫描技术在既有铁路勘测中的应用研究[J].铁道建筑,2012(4):128-131.
[8] 于鹏磊,于海洋,谢秋平,等.基于RANSAC算法的地铁隧道点云数据滤波[J].测绘工程,2014,23(8):28-31
[9] 王晏民,王国利.地面激光雷达用于大型钢结构建筑施工监测与质量检测[J].测绘通报,2013(7):39-42.
[10]郭波,黄先锋,张帆,等.顾及空间上下文关系的Joint-Boost点云分类及特征降维[J].测绘学报,2013,42(5):715-720.
[11]左志权,张祖勋,张剑清.知识引导下的城区Li DAR点云高精度三角网渐进滤波方法[J].测绘学报,2012,41(2):246-250.
[12]龚亮,张永生,李正国,等.基于多尺度虚拟网格与坡度阈值的机载Li DAR点云滤波方法[J].测绘科学,2012,37(1):101-103.
[13]巫兆聪,万茜婷,梁静,等.粒度Hough变换及其在遥感影像直线检测中的应用[J].武汉大学学报:信息科学版,2007,32(10):860-863.
