基于线性CCD的智能车路径识别控制系统
2015-03-27北京联合大学自动化学院王夕岩
北京联合大学自动化学院 王夕岩
北京联合大学电子信息技术实验实训基地 张翠霞
1 引言
每年一度的全国大学生智能车竞赛吸引越来越多的有志学子参加。参赛的智能车无论从技术水平、技术含量越来越高,而智能交通系统也是智能车的重要构成部分,在某种程度上其研究的主要目的在于降低日趋严重的交通事故发生率,提高现有道路交通的效率,缓解能源消耗和环境污染等问题。因此智能车的自动驾驶的发展有着广泛的前景。
2 系统设计及实现方案
2.1 系统分析
由于光电智能车通过传感器由128配置在光电二极管的线性阵列。在光电二极管的能量冲击产生的光电流识别道路信息,以及利用加速度计读取角度,陀螺仪读取加速度,然后两者融合在一起得到滤波后的角度和角速度,然后对电机进行控制,并外加设计了手持显示系统实现对智能车运行参数的分析。
2.2 设计结构图
根据光电车循迹和光电传感器方案的要求,智能车共包括五个部分:传感器部分、人机接口部分、MC9S12XS128模块、执行机构、电源部分。图1为本系统的结构图。
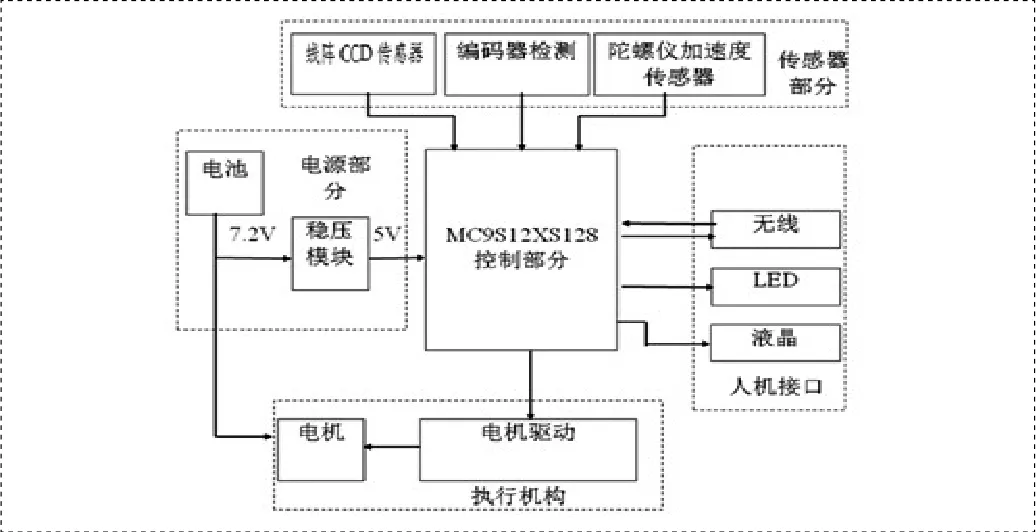
图1 智能车控制系统结构
2.3 光电智能车主要电路设计
2.3.1 线性CCD的设计
通过调整曝光时间来适应各种环境,在弱光环境增大曝光时间,在强光下减小曝光时间。但是曝光时间不能无限增大的,因为增大曝光时间势必降低采样率(每秒采样次数)采样率低控制周期就长,智能车反应就慢。因此1米的前瞻,3.5m/s的速度情况下,控制周期不得高于20ms(采样率不得低于50Hz),否则智能车转向机构反应再快也无法很好跟随道路而冲出道路。控制周期不高于20ms就意味着曝光时间不能超过20ms。试验时,我们将TSL1401线性CCD曝光时间调整到20ms(采用周期20ms),分别在强光、弱光、灯光不同环境进行采用,采样数据表明环境光线较弱时CCD输出信号较低,以致道路黑线信息不够明显,晚上日光灯环境下输出信号电压值更低,几乎接近0,根本无法辨别道路信息!考虑到智能车运行部分时间会在晚上,因此必须在不降低采样率的情况下,增大晚上弱光环境下线性CCD的输出电压。要增大输出电压,简单有效的方法就是放大输出信号,我们可以采用运放来放大AO输出信号。蓝宙电子实践表明增大运放能非常有效的解决弱光时输出电压低问题,在晚上环境同样能达到50Hz的采样率,这是无运放的线性CCD无法达到的。为了能保证输出电压在合理范围(不饱和、不截止、能分辨赛道黑线),需要根据选定的镜头确定运放放大倍数。选定的蓝宙电子线性CCD模块(镜头为无畸变镜头)中的运放电路图如图2所示。
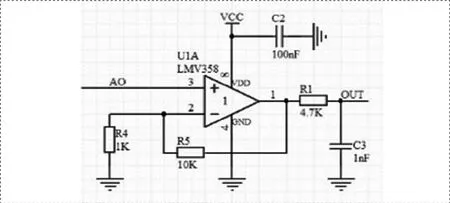
图2 CCD模块运放电路
图2 中运放放大倍数A=1+R5/R4,此电路中A=11,也就是对TSL1401的AO信号进行11倍放大。由于增加了运放,白天环境下的采样率可以调节到更高,甚至可以达到100Hz。增加了运放也会带来一个问题,就是在全黑的环境(例如盖上镜头盖)下线性CCD的输出已经不再接近0V,这里我们称全黑的环境对应的电压为暗电压,蓝宙电子设计的CCD模块暗电压是1V左右。其实暗电压完全不影响上层软件提取道路黑线,我们可以把这个暗电压当做信号中的直流分量,将采集的每个像素点的电压减去暗电压就可以了,该方法已经验证可行,读者也可以实践。
2.3.2 曝光时间自适应策略
如果道路环境各个方向的光线均匀一致,我们可以在智能车出发前根据环境光线调节
一个合理的曝光时间,以得到合理的输出,这样智能车就能采用一个固定的曝光时间跑完全程。但是这是最理想的情况,实际比赛环境远没有假设的这么理想,实际道路上会有诸多外界光线影响,而且夜晚道路上也可能有灯,因此智能车的前进方向正对光线和背对光线不能采用同一曝光参数,夜晚电灯下和离灯较远处也不能采用相同曝光参数。换句话说要想智能车跑完全程需要适时地、动态的调整曝光参数。
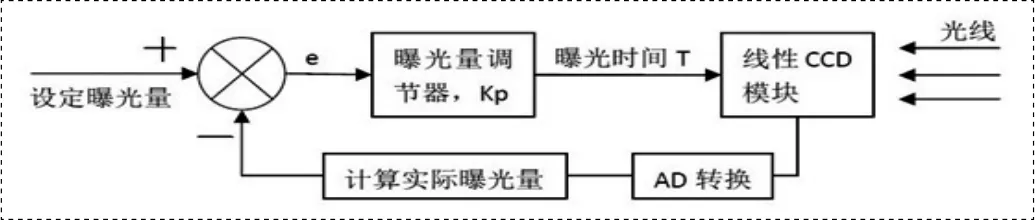
图3 曝光时间闭环控制
从图3可看出,该曝光时间自适应策略时间就是一个典型的闭环控制,控制对象是线性CCD模块的曝光时间,反馈是线性CCD感应到的曝光量。调节的目标是设定曝光量。控制器的工作原理是将设定的曝光量减去实际曝光量,差值即为曝光量的偏差e,曝光量调节器用Kp乘以e再加上上次的曝光时间作为新的曝光时间进行曝光,曝光时间调整后直接影响实际反馈的曝光量。如此反复进行调节就能达到适应环境光的目的。需要大家注意的是实际曝光量并不是某一个像素的曝光量,因为单个像素是无法反应环境光强度的,实际曝光量应该是一段时间和一定像素点强度的函数。蓝宙电子的做法是取一次采集到的128个像素电压的平均值作为曝光量当量,设定的曝光量也就是设定的128像素点平均电压。采用该策略后线性CCD采集到电压值在正常的智能车运行环境中都能保持在合理范围内。
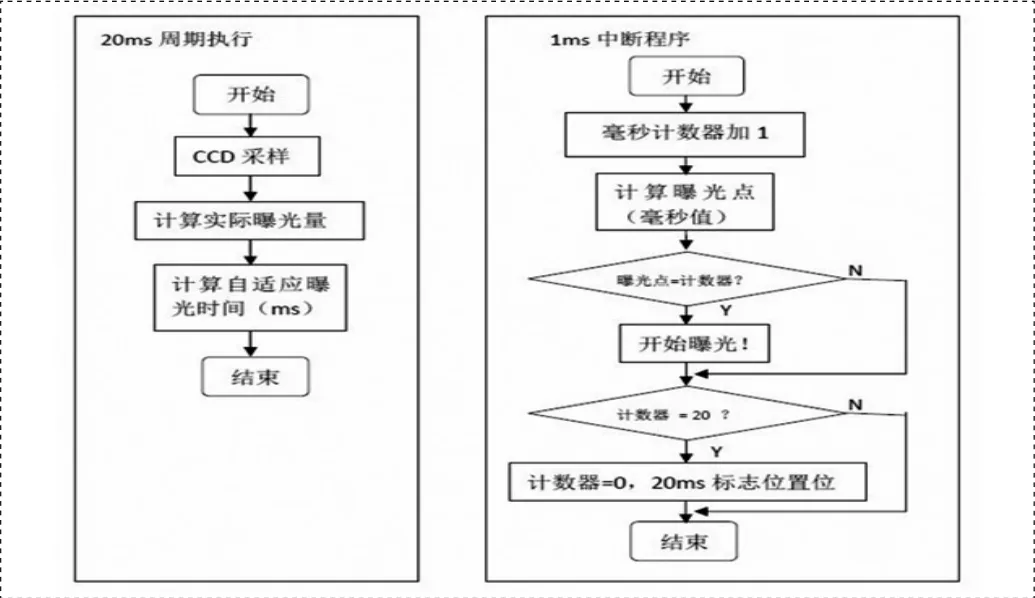
图4 曝光控制流程图
2.3.3 曝光自适应程序流程
曝光控制流程如图4所示,其中主程序20ms执行一次,主要完成CCD采样、计算实际曝光量、计算曝光时间。
采集到的128像素点数据如图5所示,该数据保存在Pi xel[128]数组中,实际曝光量当量(128像素平均电压)保存Pixel Aver ageVol t age全局变量中,曝光时间(单位ms)保存在Int egr at ionTime全局变量中。
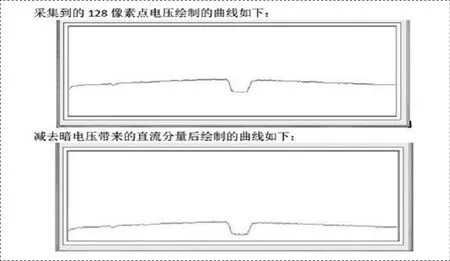
图5 采集128像素点数据
曝光控制数据采样如图6所示,曝光控制中断程序每1ms执行一次,每次中断将Timer Cnt 20ms计数器自加,根据曝光时间Int egr at ionTime计算曝光点int egr ation_piont(取值范围2~20),如果曝光点等于当前计数器则开始曝光,当Timer Cnt 20ms等于20时,重置Timer Cnt 20ms,同时置位Timer Fl ag20ms标志位,通知主程序20ms程序执行。曝光控制原理实际就是发送一次启动和移位时序,从TSL1401的时序图可看出每128时钟序列的前18个周期是内部复位(internal r eset),这18个周期不仅不曝光,还会将每个像素积分器电容放电,将积分电压清零,18个周期后的便开始积分。中断程序就是根据曝光时间在合适的曝光点输出一个内部复位序列。下一个20ms到达时会进行数据采样,采集到数据对应的曝光时间就是输出内部复位到下次采样的时间。而上一次20ms采样到本次输出内部复位信号之间的曝光将在本次曝光时清除,数据没有读取(不进行AD转换)。
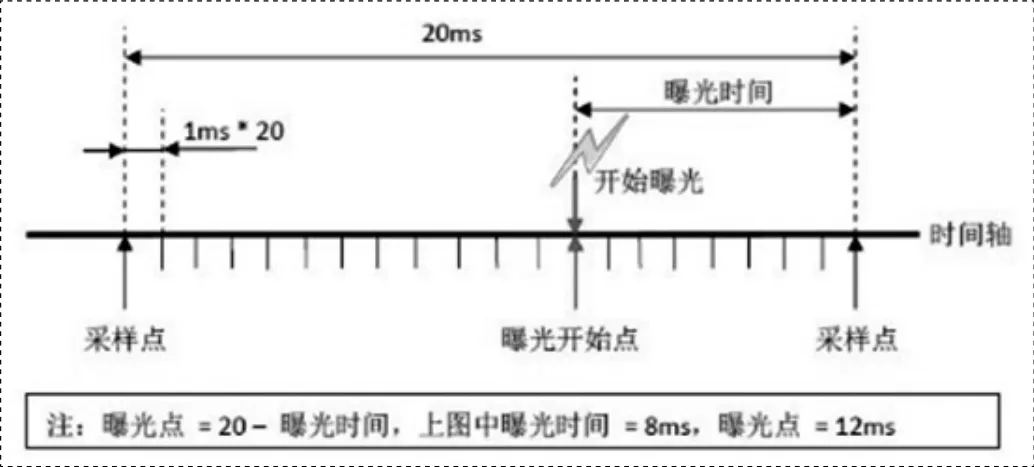
图6 曝光控制数据采样
从图6可看出,黑线特征非常明显,可以采用找凹槽算法准确的提取黑线位置。单行黑线提取算法如下,该算法之前是用于面阵摄像头的,由于线性CCD相当于面阵摄像头的一行,因此该算法同样适用于线性CCD。
3 机械系统设计与实现
3.1 车体机械建模
本次选用的车模采用了韩国爱得美公司生产的Mat iz系列1:10模型车。
3.1线性CCD的安装线性CCD作为外设进行数据的采集需要将其单独引出来,放置于顶部外端。这样便于安装和拆卸。
3.2 PCB主板固定
考虑到模型车的重心的高度和位置,主板放在模型的的前半部分,主板重心。
3.3 测速电路模块的安装
测速模块才用增量式编码器,增量式编码器的安装于车的最后部分。
3.4 差速的调节
差距决定了转弯时的性能,差速调节时应该不能太松和太紧,而且要避免和电机齿轮的间隙。
3.5 加速度计与陀螺仪的安装
考虑到陀螺仪安装要求,陀螺仪安装必须水平。
4 主要算法及实现
在设计和编写控制算法软件之前,请先确认自己的控制方案,根据自己的理解进行裁剪和修改控制方案。同一个控制算法在软件实现的时候由于采取的数据结构不同,实现的C语言的代码也各有差异。具体算法请见图7所示。

图7 主要算法控制方案
5 开发调试过程及主要参数
开发工具:
采用了USB接口的HCS12BDM下载工具,是支持Fr eescal eMC9S12系列16位单片机的BDM调试工具。
软件上采用的是CodeWar r ior f or HCS12,经过源程序的编写,连接,通过BDM下载至MC9S12XS128,完成单片机的开发过程。CodeWar r i or是Met r ower ks公司专门面向Mot or ol a(Fr eescal e)设计的嵌入式应用开发的软件工具,包括集成开发环境IDE,处理器专家库,全芯片仿真,可视化参数显示工具,项目管理器,C交叉编译器,汇编器,链接器以及调试器,支持在线编程和调试,给我们的开发,设计工作带来了很大的方便。
6 结论
本文对基于线性CCD的智能车的自主驾驶技术进行了论述和研究。同时开发了一款基于线性CCD智能车的自主识别道路的系统。在机械上通过更好的硬件、结构和调试。让车体运行流畅,更加利于控制。在系统上优化了稳定性,和真实性,为数据的采集提供了保证。利用了线性CCD在道路系别以及控制算法。将车体在道路上发生偏离轨道和速度控制的更加完美。
[1]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航天航空出版社,2007.
[2]童诗白.模拟电子技术基础[M].北京:高等教育出版社,2001.
[3]阎石.数字电子技术基础[M].北京:高等教育出版社,1998.
[4]张宇河,董宁.计算机控制系统[M].北京:北京理工大学出版社,2002.
[5]陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[6]谭浩强.C程序设计[M].北京:清华大学出版社,2001.
[7]张恺,周权等.基于光纤通信的光电跟踪实验系统设计[J].实验技术与管理2013,(03)70-73.
[8]侯国屏,王坤,叶齐鑫.LabVIEW7.1编程与虚拟仪器设计[M].北京:清华大学出版社,2005.
[9]周斌,李立国,黄开胜.智能车光电传感器布局对路径识别的影响研究[J].电子产品世界,2006,5.