车载光电平台动力学响应试验研究
2015-03-23任国全矫英祺李冬伟张亚欧
任国全,矫英祺,李冬伟,张亚欧,尹 刚
(1.军械工程学院,河北石家庄050003;2.驻127厂军事代表室,黑龙江 齐齐哈尔161000;3.63863部队,吉林 白城137001)
1 引言
动载体光电平台具有机动灵活、实时准确、市场范围广、针对性强等特点,是获得各种图像信息的主要平台[1]。随着光电平台地位的日趋重要,被广泛应用于机载或车载成像系统中,它主要涉及目标的捕获、跟踪与瞄准等功能的实现[2]。光电平台安装于车辆载体可以提高机动性,同时增加了生存能力,然而由于路面不平、载体机动、系统驱动等各方面的原因,使得成像系统工作于振动条件下[3],导致系统视轴受到较为剧烈的振动和冲击,进而严重影响其工作性能。光电系统是高精密设备,由于其结构和材料的特殊性,决定了它只能承受很弱的振动与冲击。光电系统工作时,要求平台在视轴运动的各个自由度上,其振动功率谱满足一定的性能指标[4-5]。光电平台的动力学响应是其结构动态特性在激励作用下的表现,因此,掌握其不同工况下的变化情况对光电系统性能的提高具有重要意义。
目前,动载体光电平台在飞机、舰船、车辆等载体下各种实际工作环境外界振动测试数据的采集、处理、分析及相关数据的完整性是振动控制设计工作的难点和重点,并存在相当多的空白,其对动载体光电平台的抗振设计具有重要的参考意义。本文基于某型轮式车辆与振动加速度测试装置组成的振动冲击测试系统,通过在指定的路面上进行跑车试验,测试得到振动响应数据。从定性分析的角度,得到不同路况、不同车速对光电平台动力响应的影响,总结出了光电平台的动力学特性。
2 振动对光电平台的影响
车辆行驶过程中,经历的振动环境主要有两类:一类是道路不平度和不直度、车轮蛇行运动等引起的稳态随机振动,其频率和量级与行车速度有关;另一类是由于车辆启动、制动、路面凹坑等冲击激励产生的瞬态振动[6]。轮式车辆的振动主要是由车辆以一定车速驶过随机的不平路面所引起,该振动经过轮胎、悬架、减震器等弹性阻尼元件和减振系统,传递到车载光电设备上。
光电平台是以光电器件(主要是激光器和光电探测器)为核心,将光学技术、电子/微电子技术、计算机技术和精密机械技术等融为一体,具有特定战术功能的高精密装置[7]。高强度的机械振动不仅会使光学元器件产生松动,进而降低光学系统的成像质量,而且还会对高精度轴系的稳定、电子学系统的可靠性产生不良的影响。
3 试验方案
为了对车载光电平台的动力学环境有一个清楚的了解与认识,针对某型轮式火炮进行跑车试验,利用振动冲击测试技术对车辆行驶过程中光电平台的振动特性数据进行采集。
3.1 试验条件
根据试验需求及实际情况,本试验按照国军标GB4970-1996《汽车平顺性随机输入行驶试验方法》[8]和 GJB150.16-86《军用设备环境试验方法振动试验》的规定选取了水泥平板路面(相当于二级路面)和砂石路面(相当于三级路面)两种路面作为本次试验路面,如图1所示。

图1 试验路面Fig.1 Test pavement
按照国军标的相关规定,考虑到车载光电设备的特殊性以及道路实际情况,本试验选取了不同的行驶车速进行跑车试验,如表1所示。

表1 不同路面的行驶车速Tab.1 The speed of different road surface
3.2 试验方法
为使所测振动响应数据尽量能够真实反映光电平台在车辆行驶过程中实际承受的振动情况,本次试验选取光电系统稳像头部组件的头罩顶部为测试点,如图2所示。安装一个三相加速度传感器在测试点,并且分别以z轴的负方向为重力加速度方向,y轴方向为车体前进方向,x轴方向为路面的宽度。传感器安装如图3所示。

图2 测点示意图Fig.2 Schematic diagram of measuring points

图3 传感器安装图Fig.3 Drawing of sensor installation
试验中,利用振动加速度传感器、动态数据采集系统、无线通信设备以及计算机组成振动加速度测试系统。振动加速度传感器为IEPE压电式三相加速度传感器(DH311E)用于测量各测点的三相振动响应,利用IEPE型组合式电荷放大器将测得的电荷信号转换为电压信号,动态数据采集系统由振动数据采集器和振动测试软件组成。振动测试系统如图4所示。

图4 振动测试系统Fig.4 Vibration testing system
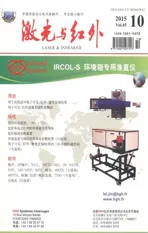
为了便于后期实验数据的分析处理,试验中以10 kHz的采样频率对响应加速度进行采集。每组试验均采集一定时间的加速度数据,然后对数据进行分析处理。以50 km/h的速度在水泥平板路面行驶,采集到测点的三方向响应加速度信号如图5所示,在砂石路面以10 km/h行驶时采集到的三向响应加速度如图6所示。

图5 水泥平板路面三向加速度Fig.5 Three acceleration of cement slab pavement
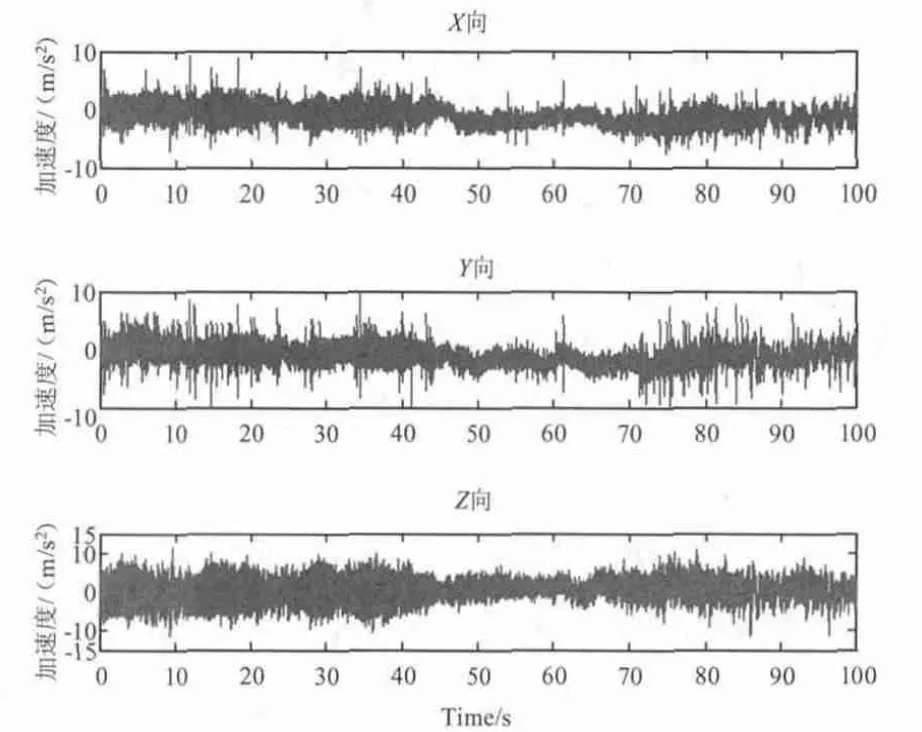
图6 砂石路面三向加速度Fig. 6 Three acceleration of sandstone pavement
4 试验数据的分析与处理
4.1 时域分析
为了分析光电平台在不同路况、不同车速下的响应差异,需对振动测试数据作进一步的分析处理。以振动加速度均方根值评价其振动响应强度,以加速度最大幅值评价其冲击响应特性。
随机振动信号的均方值是时域信号x(t)的平方在时间域内有限长度上的积分平均。离散随机振动信号均方值的计算公式为:

均方根值又称有效值,它是均方值的正平方根,是振动的平均能量(功率)的一种表达式。均方根常被用来表征振动信号的强度,因为它包含着对受振物体形成破坏的主要因素功率的意义。分析结果如表2,图7和图8所示。表中σx、σy、σz分别代表为x、y、z三个方向上的振动响应加速度均方根;ax、ay、az分别代表x、y、z三个方向上的响应加速度的最大幅值。

表2 测点三向加速度均方根值及最大幅值Tab.2 Mean square root value and maximum amplitude value of points of three directions
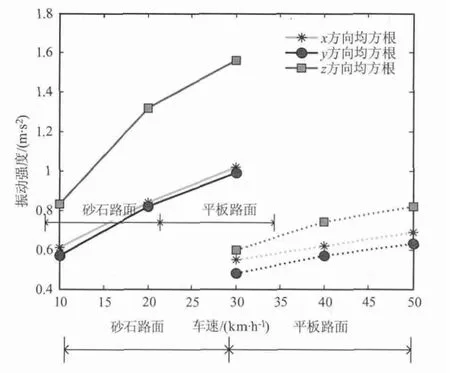
图7 振动响应强度Fig.7 Intensity of vibration response

图8 冲击响应强度Fig.8 Intensity of shock response
根据表2中的试验结果并结合图7和8可以明显看出,砂石路面上的各向加速度均方根值基本都比水泥平板路面的测试值要大,说明砂石路面的振动影响更大一些。无论是何种路面、何种车速,光电平台的垂向加速度均方根值相比横向和纵向的加速度均方根值总体上都要大,说明车辆行驶过程中光电平台垂直方向的振动量最大。对试验结果进一步分析发现,测点三向加速度随车速的增加而增大,从各向均方根值来看,垂向加速度增大趋势受速度影响较为明显,横向次之、纵向最小。
4.2 功率谱密度的求解分析

自相关函数Rx(τ)在一定程度上也表征了随机振动过程的频率结构,而且满足傅里叶积分条件,因此工程上采样自相关函数Rx(τ)的傅里叶变换获取随机振动时间历程信号x(t)的频率信息。定义平稳随机振动的自相关函数Rx(τ)的傅里叶变换为随机振动自功率谱密度函数Sx(ω),即:

在工程上由于ω≥0,定义单边功率谱密度Gx(ω)为:
在随机振动中,功或能与振幅的平方成正比,因此x2(t)可以看作是振动系统功或能的度量,由于Rx(τ)包含x2(t)的成分,故Sx(ω)或Gx(ω)表示随机振动功率按频率的分布,自功率谱密度曲线下的面积等于均方值,即:

为进一步分析振动信号和响应信息的频率成分,利用功率谱密度函数来进行求解说明。对图5所示的三向加速度信号分别进行功率谱密度的求解,结果如图9所示。
图9 加速度功率谱密度Fig.9 Acceleration power spectrum density
由图9可以看出,该路况条件下,光电平台承受振动的频谱能量主要集中在低频段内。总体上来说,z向即垂向的功率谱密度在主要的低频段内要比x向和y向的都要大,说明光电平台垂直方向的振动最厉害。通过计算其他路况条件下的加速度功率谱密度可以得到类似的结论,这也正与之前的时域分析相符。同时,从图9中功率谱密度的曲线可以发现,除了0~100 Hz范围存在两个极大值点即180 Hz和490 Hz。由曲线可以估算出:该工况条件下,光电平台的振动的能量主要集中在0~100 Hz、150~300 Hz、400~600 Hz这几个频率范围内。通过对试验中采集到的多组振动响应数据分别进行功率谱密度的计算,得出不同路况不同车速条件下车载光电平台的振动频率成分,结果如表3所示。

表3 振动频率成分Tab.3 Vibration frequency components
根据上述振动测试数据的分析,可以得到:在车辆行驶过程中,光电平台振动响应强度的大小与路面的不平度以及车速均有关。路面平整度越差,行驶车速越高,光电平台振动响应越剧烈。路面的不平整度直接影响着光电平台的冲击响应的大小。车辆行驶过程中,光电平台主要以竖直方向的振动为主,且振动能量主要集中在几个频段内,体现了该车载光电平台显著的动力学特性。
5 结论
为了研究车载光电平台的动力学响应特性,本文通过分析光电平台载车动力学环境,针对某型轮式火炮进行了跑车试验。通过对试验中车载光电平台振动响应数据的采集与分析,得到了不同路况、不同车速条件下光电平台动力学响应的变化情况,总结得出了该车载光电平台显著的动力学特性。本文的研究成果对进一步分析振动对车载光电系统成像性能的影响评估打下了良好基础,并对光电平台的抗振设计具有极其重要的参考价值。
[1] AN Yuan,XU Hui,JIN Guang,et al.Design of angular vibration isolation for optoelectronic platform on moving vehicle[J].Semiconductor Optoelectronics,2006,27(5):614-617.(in Chinese)安源,许晖,金光,等.动载体光电平台角振动隔振设计[J].光电技术应用,2006,27(5):614-617.
[2] LI Yulong,HE Zhongbo,BAI Hongbai,et al.Analysis of influences of angular vibration on MTF in optical imaging systems[J].China Mechanical Engineering,2012,23(15):1784-1788.(in Chinese)李玉龙,何忠波,白鸿柏,等.角振动对光学成像系统传递函数影响分析[J].中国机械工程,2012,23(15):1784-1788.
[3] HOU Yang,ZHAO Xinbo,MA Zhong,et al.Key technology for image display performance under vibration environment[J].China Mechanical Engineering,2013,24(16):2212-2215.(in Chinese)侯阳,赵歆波,马钟,等.振动条件下图像显示性能分析系统关键技术[J].中国机械工程,2013,24(16):2212-2215.
[4] WANG Jing,JI Ming,ZHANG Chong,et al.Study on relation between stabilization precision and sight range of airborne stabilized sighting system[J].Laser& Infrared,2013,43(9):1030-1035.(in Chinese)王晶,纪明,张冲,等.机载稳瞄系统稳定精度与视距关系的研究[J].激光与红外,2013,43(9):1030-1035.
[5] YU Miao.Study on stabilization of carborne equipment platform system[D].Changchun:Changchun University of Science and Technology,2008.(in Chinese)于淼.车载平台系统的稳定研究[D].长春:长春理工大学,2008.
[6] ZHOU Jingshu,LIU Zhaohui,XU Feng.Research of cushioning system for vehicular photoelectric transit[J].Acta Photonica Sinica,2007,36(Sup1):244-248.(in Chinese)周静淑,刘朝辉,许峰.车载状态下光电经纬仪的减振防护研究[J].光子学报,2007,36(Sup1):244-248.
[7] WANG Xiaopeng,LIANG Yanxi,JI Ming.Introduction to military photoelectric technology and system[M].Beijing:National Defense Industry Press,2011.(in Chinese)王小鹏,梁燕煕,纪明.军用光电技术与系统概论[M].北京:国防工业出版社,2011.
[8] National Bureau of Standards.GB4970-1996 Method of random input test-automotive ride comfort[S]//China’s national standard assembly:1996 revision.Beijing:Standard Publishing Press of China,1996:187-192.(in Chinese)国家标准局.GB4970-1996汽车平顺性随机输入行驶实验方法[S]//中国国家标准汇编:1996年修订.北京:中国标准出版社,1996:187-192.