基于高斯搜索的改进粒子群优化在磨矿预测控制中应用
2015-03-20孙志民
孙志民,赵 珺,王 伟
(大连理工大学 控制科学与工程学院,辽宁 大连 116024)
0 引 言
磨矿分级过程是整个选矿厂生产工艺流程中关键的环节.磨矿作业直接关系到选矿生产的处理能力,磨矿产品的质量对后续浮选作业乃至整个选矿厂的经济技术指标也有很大的影响[1].选矿厂为达到控制指标,需要经常调节控制量,频繁且大范围的变化易导致设备稳定性变差,影响生产安全.所以,有效地限制控制量的变化至关重要.
磨矿过程具有非线性,大时滞时变特性,现场当前主要采用的是常规PID 控制.此类方法在大的干扰量、工况发生改变时,难以实现理想的控制效果[2-4].预测控制是一种以闭环优化模型为基础的控制策略,采用模型预测、在线的滚动优化和反馈校正等方法,能有效地克服被控过程的不确定性、非线性和关联性,在工业过程控制中获得了大量成功的应用[5-7].在预测控制方法中,预测模型的精度对控制效果起到至关重要的作用.支持向量机基于统计学理论,具有较强的逼近能力和泛化能力[8-10].但是,上述方法仅追求控制效果,而忽略了对控制量的考虑,控制量大范围的变化势必会加速控制设备的磨损,而且也会带来较高的能量消耗.如何在保证良好控制效果的同时,尽量减小控制量的变化率越来越被人们所重视.
本文提出一种基于高斯搜索的改进粒子群优化(Gaussian search based improved particle swarm optimization,G-IPSO)算法,该算法改变传统粒子群的种群初始化策略,将粒子群以控制量初始值为中心进行高斯分布,增加在小范围内寻优的概率;并且改变传统粒子群的速度更新方式,将控制量初始值引入速度更新公式,将该算法融合到最小二乘支持向量机(least square support vector machine,LS-SVM)预测控制中,构建磨矿系统预测控制器.
1 问题描述
磨矿分级过程是将粗矿粒磨细并将粗细矿粒分离的工业过程,为浮选作业提供浓细度合适的矿浆.其工业过程如图1所示,它是由一个溢流型球磨机、一个变速率的渣浆泵和一个水力旋流器所组成的标准的磨矿回路.矿石经过给矿皮带进入球磨机进行研磨,球磨机中的矿浆经过渣浆泵打到旋流器进行分离,旋流器的溢流进入后续的浮选作业,旋流器的返砂返回到球磨机再次研磨.回路中存在两个固有的控制环节,一个是通过调整渣浆泵的速率来保持泵池液位的恒定,另一个是通过调整给矿水来保持球磨机磨矿浓度的稳定.

图1 磨矿过程流程图Fig.1 Schematic diagram of grinding process
选矿厂为了使磨矿粒度、浓度、磨机处理量等控制目标达到良好的控制效果,需要不断地调整给矿量、泵池补加水等控制量,控制器机械结构大范围的变化必然影响设备的稳定性,耗能且影响生产安全.如何既保证良好的控制效果,又能最大限度地限制控制量的变化,是一个亟需解决的问题.LS-SVM 作为一种通用函数逼近器可以以任意精度逼近非线性系统,具有很强的泛化能力,是非线性系统建模的有力工具.支持向量机预测器建立了非线性被控对象的预测模型,可以根据当前系统的控制信息预测出被控对象在未来的输出值.再通过设计系统的优化性能指标,利用非线性优化控制器即可求出较优的控制量.模型预测控制中的滚动优化是一个求解非线性约束优化问题的过 程,粒 子 群 优 化(particle swarm optimization,PSO)是近年来发展起来的一种多变量随机寻优搜索方法,能快速有效地解决预测控制器设计中的目标函数优化问题[11-13].本文采用的LSSVM 模型预测控制的结构如图2所示.
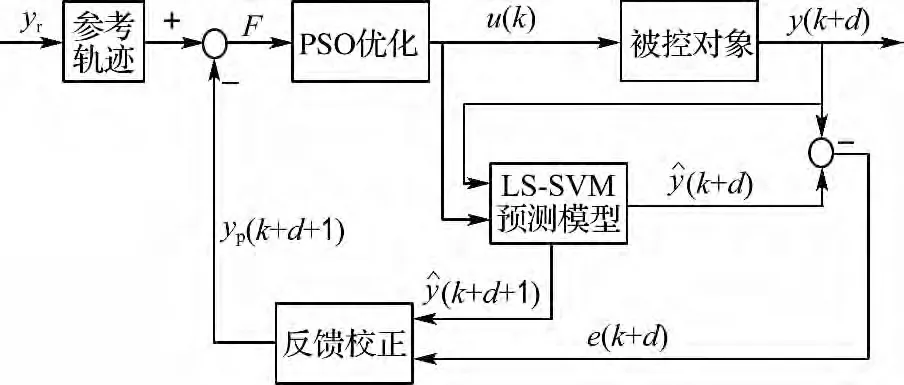
图2 基于PSO 优化的LS-SVM 模型预测控制结构图Fig.2 Structure diagram of LS-SVM model predictive control based on PSO
2 算法介绍
粒子群算法是一种基于种群的随机优化算法.设粒子群体规模为L,粒子i表示为popi=(ui,Fi),0<i≤L,其中ui=(ui1ui2…uim)表示粒子i的位置向量,Fi表示粒子i的当前适应值向量.设粒子i的速度向量为vi= (vi1vi2…vim).种群的初始位置为ui=(umin1+r(umax1-umin1)umin2+r(umax2-umin2) …uminm+r(umaxm-uminm)),r为[0,1]间的随机数.在第t次迭代,粒子i的速度、位置、惯性权重的调整公式为[14]
式中:c1、c2为加速因子;r1、r2为[0,1]间的随机数;Fbi=(Fbi1Fbi2…Fbim),表示粒子i所经历过的历史最好位置;Fg=(Fg1Fg2…Fgm),表示整个粒子群中所有粒子发现的最好位置,即粒子群优化获得的控制量.
然而,传统的粒子群优化在初始化粒子群时,每个粒子被随机分散到控制量的变化范围内,然后再进行搜索.由于每次的求解控制量没有与前一时刻的控制量建立联系来限制控制量的变化,可能导致控制量的变化率很大.显然,减小控制量的变化率可以对安全生产提供保障,以及延长控制器的使用寿命.本文提出了高斯区域搜索的改进粒子群优化来求解控制变量.所提出的优化算法为了能达到既尽量限制控制量变化率又能保证控制效果的目标,须加强粒子群的局部搜索能力,尽量在初始值附近搜索到最优解.为此,将上一时刻的控制量考虑在内,将其作为粒子群的高斯中心,粒子群以高斯分布形式散落在搜索区域内,从粒子群中心开始向外搜索.搜索的迭代过程中,修改粒子群的速度更新方式,以使搜索始终有指向粒子中心的向心力,直到目标函数值满足所设定的阈值或者达到最大迭代次数.
2.1 基于高斯搜索的改进粒子群优化
2.1.1 高斯分布搜索 本文设计了一种扩散算子并将其引入粒子群优化算法.该扩散算子是一个变异算子,采用高斯变异技术.设种群中粒子位置初始值为u(k)=(u1(k)u2(k) …un(k)),经扩散操作后的粒子位置u′(k+1)=(u′1(k+1)u′2(k+1) …u′n(k+1)).则扩散算子由式(2)表示:

其 中i=1,2,…,n,δ′i为正态分布的标准差,Ni(0,δ′i)为一个服从正态分布的随机数,其均值为0,标准差为δ′i.由于正态分布的随机数在均值附近取值的概率较大,u′(k+1)得到一个小步长变化量的概率较大.换句话说,粒子将在初始值附近进行一次局部搜索的概率很大.利用式(2)初始化粒子群,有利于在小范围内搜索到最优解.
2.1.2 改进粒子群优化 为了增强粒子群优化的搜索能力,本文对粒子群速度更新方式进行了改进.在基本的速度更新方式中,粒子的局部最优与全局最优对粒子的状态影响较大.在迭代过程中,粒子通过跟踪这两个“极值”来持续更新自己,以使自己向“极值”方向靠拢.本文将初始值u(k)引入速度更新公式,由式(3)表示:

此改进加强了初始值对粒子运行路线的干预程度,和局部最优与全局最优一样起到对粒子的“拉拽”作用,使得粒子在搜索最优解的同时,能兼顾搜索步长的极小化.
2.2 初始解的生成
若初始种群中存在有最优解或者次最优解,算法会以较高效率收敛并停止.为减小粒子群优化的求解时间,加快优化计算速度,本文对初始种群的产生过程做出改进,所提方法的核心思想是借用上一时刻的控制量来产生优质种群,不只是简单地随机生成初始种群.
在第一步求解控制量时因为没有“种子”信息,可以高斯随机地产生全部初始种群进行计算.在求解过程中,将上一时刻k优化结果中的后P-1个控制量左移一位,最后一个控制量高斯随机生成,构成k+1时刻的一个初始粒子(如图3所示).这种方法在保证了初始群体中存在优良种子个体的同时保证群体的多样性,可以加快算法收敛的速度,减少求解时间.

图3 初始粒子的产生Fig.3 Initialization of particle
2.3 基于G-IPSO 的预测控制器
对一个有d步延迟的非线性被控对象,当输入控制量为u(k)时,输出量为y(k+d),通过被控对象过去的输入输出和当前输入u(k),由LS-SVM 预测器获得系统的输出预测值为(k+d),对于待优化的输入u(k+1)和上一时刻的输入输出,获得系统的输出预测值为(k+d+1).系统实际的输出量和预测值的偏差

用偏差修正(k+d+1)进行反馈校正补偿:

为一个非线性系统设计优化控制器,就是要通过粒子群优化算法求得使适应值函数最小的优化控制量.设定控制量的适应值函数为
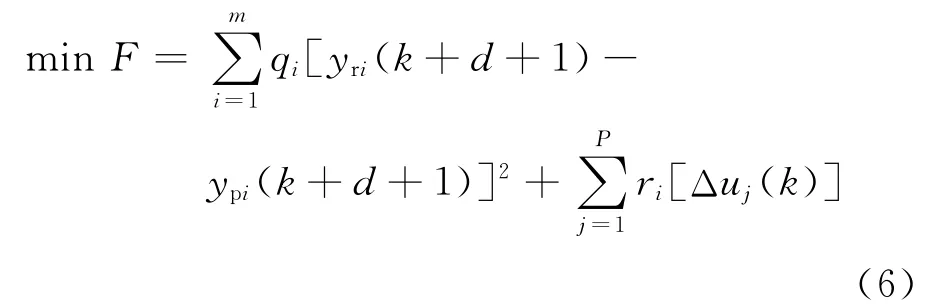
式中:m为输出变量个数,yr为参考轨迹,yp为经反馈校正后的预测输出,qi为输出加权,ri为控制加权,P是控制时域,Δuj(k)=uj(k)-uj(k-1).
实际中,为了很好地限制控制量的变化,控制加权的选取就显得格外重要,常规手段是经过大量的实验来确定控制加权系数,但这具有很强的主观性.为了避免这种主观性,又保证对输入的变化量进行限制,采用本文提出的基于高斯搜索的粒子群优化来优化控制变量,可以约简适应值函数为

2.4 G-IPSO算法步骤
G-IPSO 算法的具体实现步骤如下:
步骤1 根据上一时刻的控制量u(k),将其作为粒子群的高斯中心,应用2.1.1的方法产生高斯分布的初始粒子群u′(k+1).
步骤2 利用产生的粒子群,计算各自的适应值,得出粒子群的全局最优Fgm并记录拥有最优适应值的粒子.
步骤3 判断全局最优适应值Fgm是否满足迭代停止条件.满足或者达到最大迭代次数即退出寻优过程,并将最优粒子作为当前时刻的控制量u(k+1)作用到控制对象中.
步骤4 根据式(3)更新每个粒子的速度和位置,转入步骤2.
3 仿真实验及分析
为了验证本文算法的有效性,采用两类问题进行实验:第一类是对典型多峰值函数进行控制,多峰值函数在同一控制目标下会有多个解,适于验证本文算法的有效性;第二类是工业过程实验,在实际工业应用中也能够有良好的应用效果.
3.1 多峰值函数
为显示基于高斯搜索的改进粒子群优化算法在约束控制量变化方面的优越性,采用文献[15]的输入二维的多峰值函数(式(8))作为仿真模型,并与普通粒子群优化进行比较:

其中x∈[-1,1],y∈[-1,1].
3.1.1 参数设置
(1)LS-SVM 预测器中,利用该函数模型输入变化幅度为x∈[-1,1]、y∈[-1,1]的随机信号,仿真得到400组数据,前300组作为训练样本,后100组作为测试样本,离线训练最小二乘支持向量机模型.选择参数分别为γ=10,δ2=0.05.
(2)本文算法优化控制器中,设定δ′x=δ′y=0.1,P=3,L=50,最大迭代次数为200,阈值Fok=10-7.
(3)控制目标为正弦函数yr(k)=0.8×sin(kπ/20),其中k为仿真步数.仿真总步数为80.
3.1.2 实验效果与分析 实验效果如图4~6所示.
从图4可以看出,两种优化方法均能取得很好的控制效果.但是,图5与6的结果表明传统粒子群优化算法的x和y的变化量在搜索范围内大幅度波动,显然这对控制器来说是不利的.而基于高斯搜索的改进粒子群优化算法的x和y的变化量均在小范围内小幅度波动,实验结果能够说明基于高斯搜索的改进粒子群优化能在保证控制效果的前提下,对x和y的变化率起到明显的约束作用.

图4 f(x,y)在两种优化方法下的闭环响应Fig.4 The closed-loop response of f(x,y)by two kinds of optimization methods
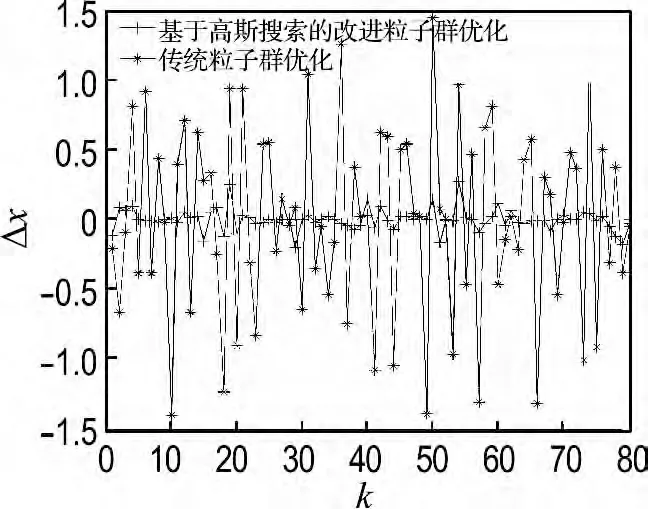
图5 两种优化方法下x 的变化量Fig.5 The variation of xin two kinds of optimization methods
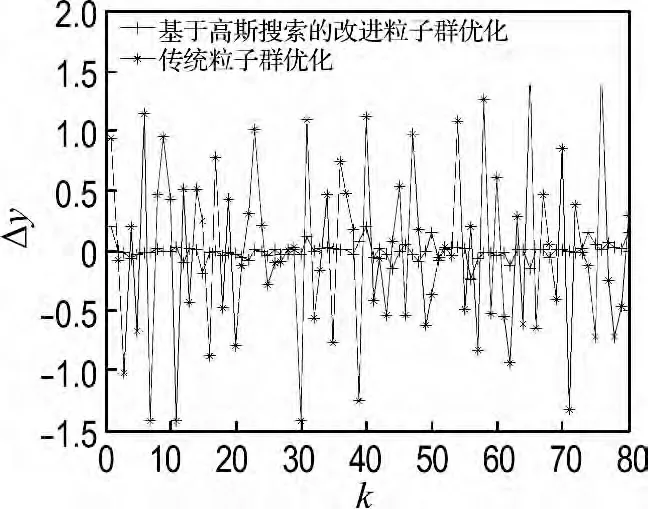
图6 两种优化方法下y 的变化量Fig.6 The variation of yin two kinds of optimization methods
另外,鉴于粒子群优化算法是随机优化算法,为了比较传统粒子群优化算法和采用本文的基于高斯搜索的改进粒子群优化算法的效果,本文给出多次实验的平均控制量变化率作为比较指标.

其中T代表仿真的总步数,u代表x或y.分别按照两种方法做了10组对比实验,得到的控制量平均变化率如表1所示.
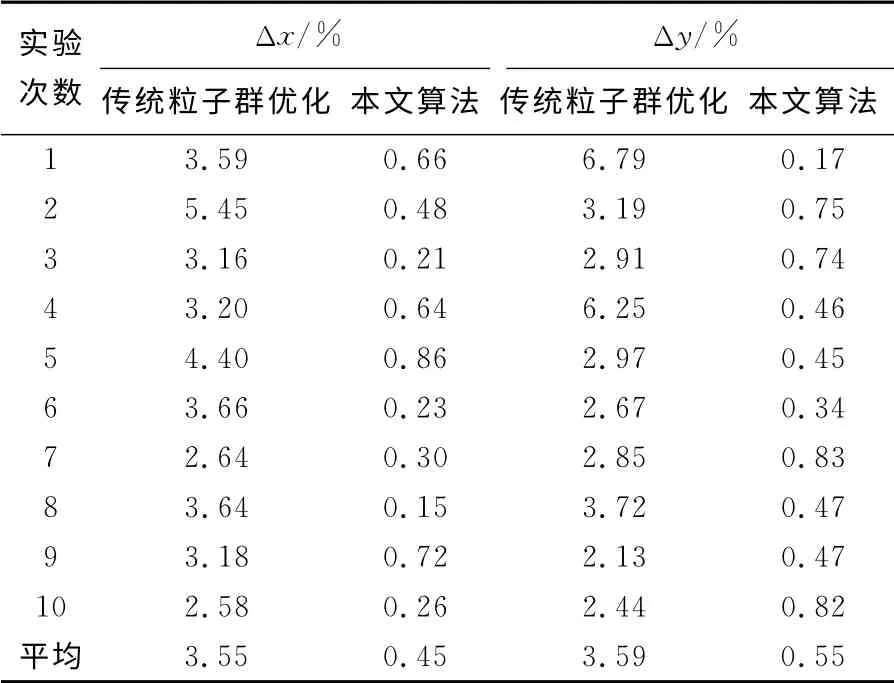
表1 传统粒子群优化和本文算法控制多峰值函数的控制量变化率效果对比Tab.1 Comparative results of the control variable changing rate on multi-modal function between classic PSO and G-IPSO
从表1中可以明显看出,与传统粒子群优化搜索策略相比,在使用本文优化算法之后,x、y的变化率都明显降低,针对f(x,y)模型,控制量x和y的平均变化率均大幅度减小,说明本文算法限制操作变量变化幅度的效果非常明显.
3.2 工业模型
文献[16]给出了某实验型球磨机磨矿回路在某工况下的动态特性.在此模型中控制变量为球磨机给矿速率u1和泵池补水速率u2;两个被控变量为溢流中通过104μm 孔径的磨矿粒度质量分数y1和磨机排矿率y2.通过阶跃响应测试磨矿系统的传递函数模型如式(10)所示:

3.2.1 参数设置
(1)Matlab 仿真中,仿真采样时间 取0.5s[17].为模拟现场情况,在控制量加载时叠加方差为0.01的高斯噪声.
(2)LS-SVM 预测器中,利用该磨矿系统的离散模型输入变化幅度为u1∈[0,1]、u2∈[0,1.2]的随机信号,仿真得到1 000 组数据.本文将前800组作为训练样本,后200组作为测试样本,离线训练粒度和磨机处理量的最小二乘支持向量机模型.选择参数分别为γ=50 000,δ2=50和γ=20 000,δ2=100.
(3)本文算法优化控制器中,设定δ′x=δ′y=0.1,P=3,L=70,最大迭代次数500,阈值Fok=10-6.
3.2.2 仿真结果与分析 采用基于高斯搜索的改进粒子群优化的系统跟踪粒度设定值和磨机排矿速率设定值的控制效果如图7~10所示.
从图7和8可以看出,即使工作点变化较大,采用本文提出的基于高斯搜索的改进粒子群优化的预测控制器也可以无超调地跟踪设定值的变化,并且具有足够快的响应速度.而且,从图9和10可以看出大幅度地切换设定值不会导致控制量的突变.由于粒子群优化算法是随机搜索算法,控制系统输出存在很小的静态误差.
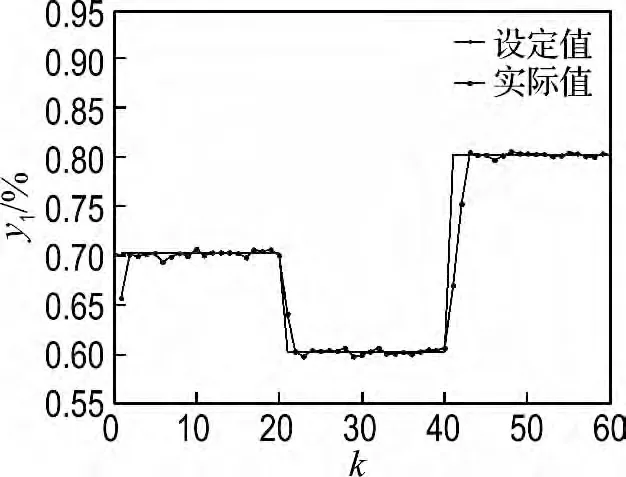
图7 磨矿粒度的闭环响应Fig.7 The closed-loop response of grinding size
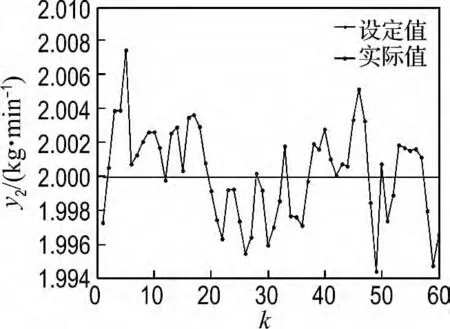
图8 磨机处理量的闭环响应Fig.8 The closed-loop response of mill throughput
为了验证该控制器的抗干扰能力,在仿真第20步时加入给矿干扰,使给矿量变化0.1;在仿真第40步时加入补加水干扰,使补加水变化0.1,仿真结果如图11~14所示.
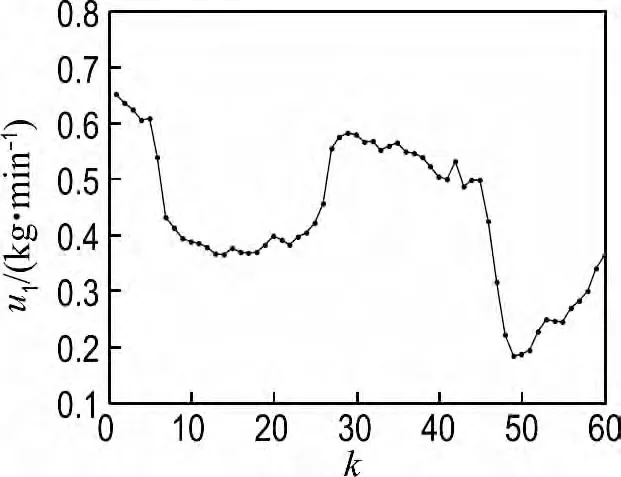
图9 给矿速率的闭环响应Fig.9 The closed-loop response of fresh feed rate

图10 泵池补加水的闭环响应Fig.10 The closed-loop response of water addition rate to the sump
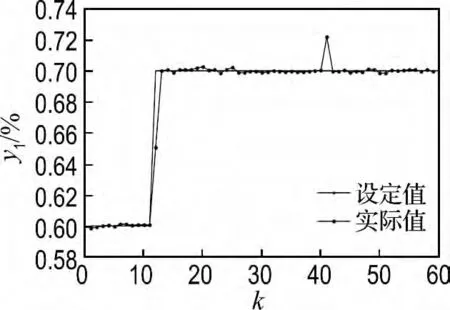
图11 干扰条件下磨矿粒度的闭环响应Fig.11 The closed-loop response of grinding size under interference
从图11和12可以看出,磨矿粒度和磨机处理量的实际值均出现了一定量的扰动,但整个系统并没有受到较大的影响,扰动过后迅速恢复正常,说明该预测控制器对系统的扰动具有良好的鲁棒性.而且,从图13和14可以看出,在系统受到扰动,控制量波动后迅速恢复小范围的变化.

图12 干扰条件下磨机处理量的闭环响应Fig.12 The closed-loop response of mill throughput under interference
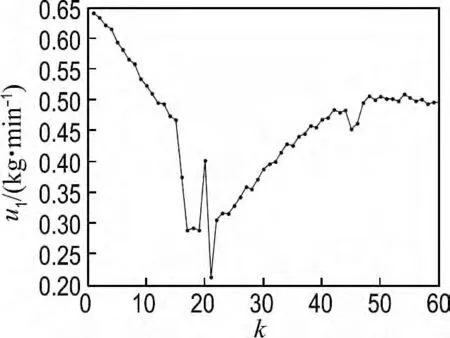
图13 干扰条件下给矿速率的闭环响应Fig.13 The closed-loop response of fresh feed rate under interference
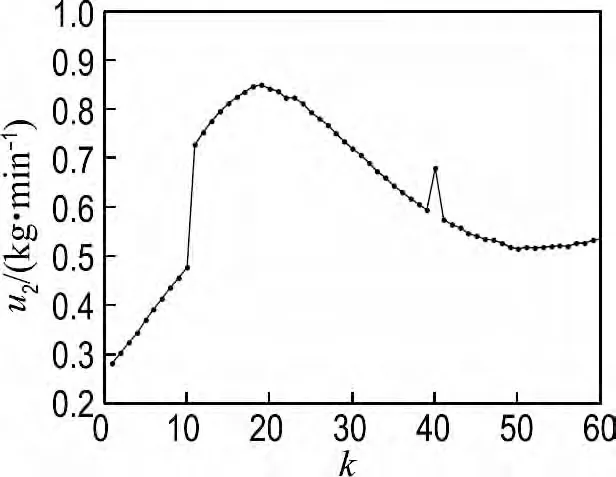
图14 干扰条件下泵池补加水的闭环响应Fig.14 The closed-loop response of water addition rate to the sump under interference
为了比较未加操作变量变化限制和采用本文算法的效果,同图7、8的控制要求,以式(9)作为比较指标,分别按照两种算法做了10 组对比实验,得到的平均控制量变化率如表2所示.
从表2中明显看出,与传统粒子群优化搜索策略相比,在使用本文算法后,u1、u2变化率都明显降低,说明该算法对复杂的工业系统的操作变量亦有优越的约束能力,具有良好的应用前景.
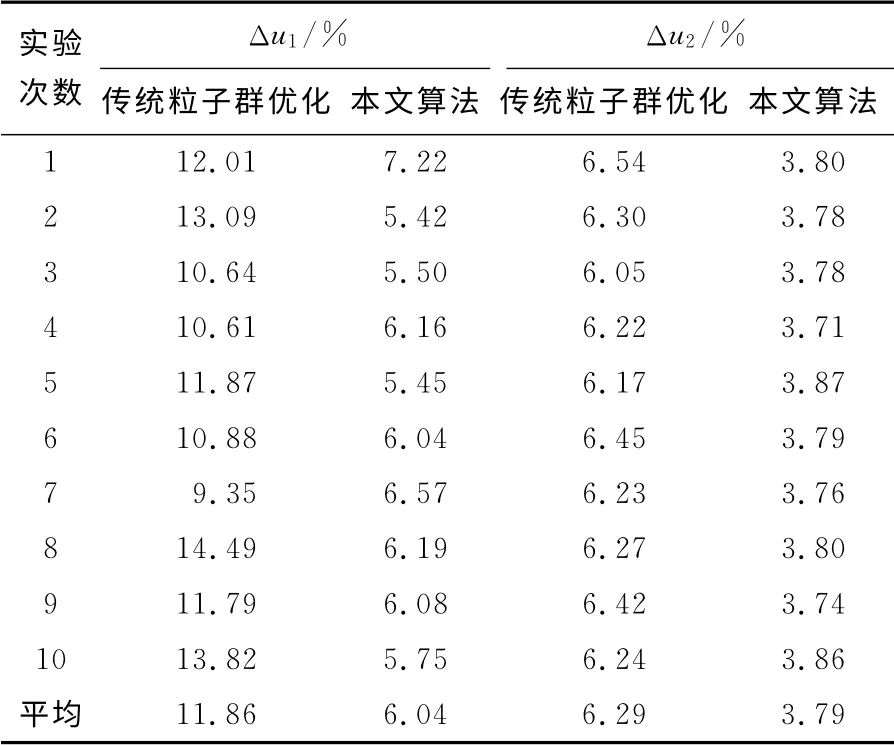
表2 传统粒子群优化和本文算法控制磨矿过程的控制量变化率效果对比Tab.2 Comparative results of the control variable changing rate on grinding process between classic PSO and G-IPSO
4 结 语
为限制预测控制中控制变量的变化幅度,又能保证控制效果,本文提出一种基于高斯搜索的改进粒子群优化算法,并将此算法与LS-SVM 相融合建立非线性预测控制器.仿真结果表明该算法在对球磨机磨矿回路进行控制中能够取得满意的控制效果,控制器具有很快的响应速度和较高的鲁棒性.证明本文提出的基于高斯搜索的改进粒子群优化,与传统的粒子群优化相比,能够有效地约束控制量的变化.
[1] Méndez D A,Gálvez E D,Cisternas L A.Modeling of grinding and classification circuits as applied to the design of flotation processes[J].Computers and Chemical Engineering,2009,33(1):97-111.
[2] 程 恒.模糊PID 控制技术在磨矿系统中的应用[J].矿山机械,2010,38(3):76-79.CHENG Heng.Application of the fuzzy PID control technology to the grinding system [J].Mining &Processing Equipment,2010,38(3):76-79.(in Chinese)
[3] Pomerleau A,Hodouin D,Desbiens A,etal.A survey of grinding circuit control methods:from decentralized PID controllers to multivariable predictive controllers [J].Powder Technology,2000,108(2):103-115.
[4] 王介生,孙世峰.磨矿过程参数自整定PID 解耦控制器的设计[J].系统仿真学报,2011,23(10):2220-2223.WANG Jie-sheng,SUN Shi-feng.Design of selftuning PID decoupling controller of grinding process[J].Journal of System Simulation,2011,23(10):2220-2223.(in Chinese)
[5] Balaji V,Vasudevan N.Model predictive control of pH in pharmaceutical process[C]//IEEE 2009 International Conference on Mechatronics,ICM 2009.Piscataway:IEEE Computer Society,2009:4957127.
[6] Moon U C,Lee K Y.Step-response model development for dynamic matrix control of a drumtype boiler-turbine system [J].IEEE Transactions on Energy Conversion,2009,24(2):423-430.
[7] 侯志祥,吴义虎,袁松贵,等.基于AEPSO 优化的神经网络多步预测控制[J].中南大学学报:自然科学版,2007,38(6):1162-1168.HOU Zhi-xiang,WU Yi-hu,YUAN Song-gui,et al.Multi-steps predictive control of neural networks based on AEPSO optimization [J].Journal of Central South University:Science and Technology,2007,38(6):1162-1168.(in Chinese)
[8] LI Li-juan,SU Hong-ye,CHU Jian.Generalized predictive control with online least squares support vector machines[J].Acta Automatica Sinica,2007,33(11):1182-1188.
[9] WANG Xu-hong,HU Deng-yu.Support vector machine based predictive control for active power filter [C]// ICIEA 2007:2007 Second IEEE Conference on Industrial Electronics and Applications.Piscataway:IEEE Computer Society,2007:559-562.
[10] 穆朝絮,张瑞民,孙长银.基于粒子群优化的非线性系统最小二乘支持向量机预测控制方法[J].控制理论与应用,2010,27(2):164-168.MU Chao-xu,ZHANG Rui-min,SUN Chang-yin.LS-SVM predictive control based on PSO for nonlinear systems [J].Control Theory &Applications,2010,27(2):164-168.(in Chinese)
[11] 李 涛,吕勇哉,陈 鹏.基于SVM 和PSO 的新型非线性模型预测控制[J].控制工程,2008,15(增刊):102-105.LI Tao,LV Yong-zai,CHEN Peng.New NMPC based on the integration of SVM and PSO [J].Control Engineering of China,2008,15(S1):102-105.(in Chinese)
[12] 夏晓华,刘 波,栾志业,等.基于PSO 的预测控制及在聚丙烯中的应用[J].控制工程,2006,13(5):1-3.XIA Xiao-hua,LIU Bo,LUAN Zhi-ye,etal.PSO based predicted control and its application to temperature control of polypropylene reactor[J].Control Engineering of China,2006,13(5):1-3.(in Chinese)
[13] 龙 文,梁昔明,龙祖强.基于混合PSO 优化的LSSVM 锅炉烟气含氧量预测控制[J].中南大学学报:自然科学版,2012,43(3):980-985.LONG Wen,LIANG Xi-ming,LONG Zu-qiang.O2content in flue gas of boilers predictive control based on hybrid PSO and LSSVM [J].Journal of Central South University:Science and Technology,2012,43(3):980-985.(in Chinese)
[14] SHI Yu-hui,Eberhart R.Modified particle swarm optimizer[C]//Proceedings of the IEEE Conference on Evolutionary Computation,ICEC.Piscataway:IEEE,1998:69-73.
[15] 吕 佳.基于人工免疫网络的多峰值函数优化[J].重庆师范大学学报:自然科学版,2006,23(3):45-48.LV Jia.Multi-modal function optimization based on artificial immune network[J].Journal of Chongqing Normal University:Natural Science Edition,2006,23(3):45-48.(in Chinese)
[16] Ramasamy M,Narayanan S S,Rao Ch D P.Control of ball mill grinding circuit using model predictive control scheme[J].Journal of Process Control,2005,15(3):273-283.
[17] 冯国良,李太福,钟秉翔,等.纯滞后控制系统采样周期的选择[J].重庆大学学报,2003,26(6):125-128.FENG Guo-liang,LI Tai-fu,ZHONG Bing-xiang,etal.Sample period′s choice problem of control system with pure delay[J].Journal of Chongqing University,2003,26(6):125-128.(in Chinese)
