胸鳍摆动推进机器鱼滚转机动控制
2015-03-19宫昭蔡月日毕树生马宏伟
宫昭,蔡月日,毕树生,马宏伟
(北京航空航天大学 机械工程及自动化学院,北京 100191)
鱼类经过亿万年的自然选择,进化出了非凡的游动能力,在游动速度、效率、机动性等各个方面表现近乎完美[1],这也吸引着研究人员通过仿生的方式来提高水下机器人的性能[2-3].
多数鱼类通过弯曲身体产生从前往后的运动波,一直延伸到尾鳍,这种游动方式被称为身体/尾鳍(Body and/or Caudal Fin,BCF)模式,另外一些鱼类则通过摆动胸鳍或者中间鳍的方式来游动,这种方式则被称为中间鳍/对鳍(Median and/or Paired Fin,MPF)模式[4].
与BCF模式相比,在仿生机器鱼研究上,MPF模式在机动性与稳定性上具有更大的优势[5-7].牛鼻鲼,作为 MPF模式鱼类的一种,在机动性与稳定性方面优势明显.仿生牛鼻鲼机器鱼与其仿生原型一样,具备宽大的胸鳍,通过对胸鳍摆动运动的控制,可以实现机器鱼在航向、俯仰与滚转3个方向上的高机动可控游动.
胸鳍摆动推进机器鱼一般通过两侧胸鳍的不对称(振幅或相位差不同)摆动[8]产生偏航扭矩以实现航向控制;俯仰控制则是通过尾鳍摆动产生俯仰力矩实现[9].但是较少有学者研究机器鱼的滚转机动控制.滚转机动控制对机器鱼抵抗水流扰动能力以及特殊工作环境(如机器鱼水下探测时,需要穿过废墟中的狭缝,机器鱼可以调整自身的滚转角,使腹部平面与狭缝平行,进而在沿狭缝宽度方向上所占尺寸最小,便于自身通过)下的避障能力都至关重要.
本文给出了一种基于中枢模式发生器(Central Pattern Generator,CPG)的模糊控制方法,用于实现胸鳍摆动推进机器鱼的滚转机动控制.在北京航空航天大学人工泳池进行了相关滚转游动的实验.实验结果表明,机器鱼能够快速达到并稳定在目标滚转角度,由此证明了本文提出的滚转控制方法的有效性.
1 机器鱼机械结构及控制系统
胸鳍摆动推进机器鱼样机的机构简图如图1所示,样机由中间基体,胸鳍单元以及尾鳍单元构成.左右两侧胸鳍各由3根鳍条构成,尾鳍由2根鳍条构成.两侧胸鳍的中间鳍条(鳍条2与鳍条4)分别具有一个转动关节,转动关节连接一根碳纤维鳍条,然后通过弹簧分别与前后鳍条相连.当胸鳍摆动时,碳纤维鳍条在弹簧拉力作用下,会产生俯仰运动,有利于增大胸鳍尖端拍水时的攻角,从而提高推进效率.
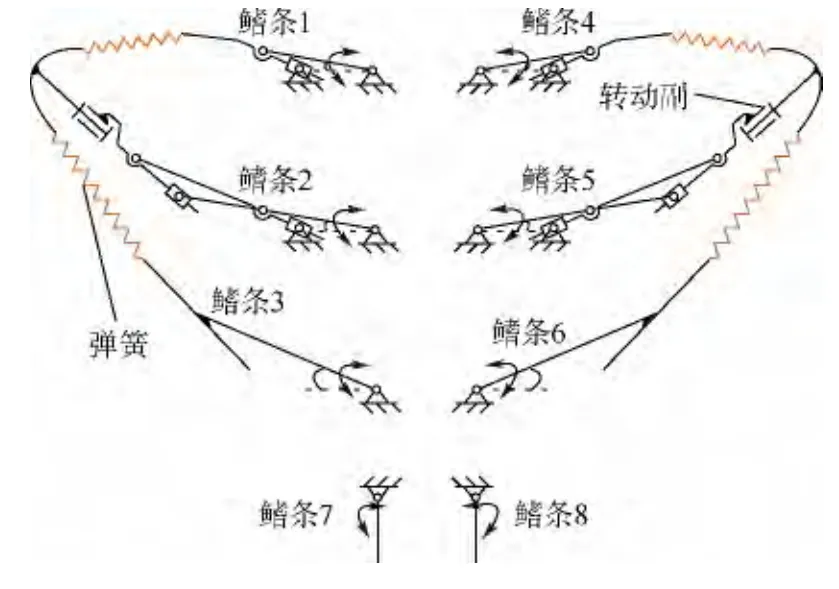
图1 机构简图Fig.1 Mechanism schematic
图2为机器鱼的物理样机,每一根胸鳍鳍条均由高扭矩舵机(3.7N·m,7.4V 供电)驱动.橡皮绳作为弹簧来提供鳍条间的拉力;浮力块用于机器鱼的水下配平,使机器鱼在静止状态下能够以水平姿态悬浮于水中.
相比之前研制的机器鱼[10-11],本文中的机器鱼采用了新的走线形式,舵机的供电线与信号线均通过壳体内部的走线孔连接到控制板上,除无线串口模块天线与接收机信号线外,无其他线路直接暴露于水中.在密封方式上,O型圈与X型圈分别用于机器鱼的静密封与动密封,保证了机器鱼水下密封的可靠性.
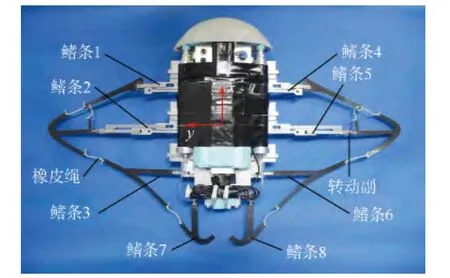
图2 物理样机Fig.2 Physical prototype
机器鱼的控制系统硬件结构如图3所示.采用72MHz的单片机作为微型控制器单元,负责传感器的数据采样,上位机以及遥控器控制信号接收,数据处理,决策,然后发送运动参数给CPG控制器.CPG控制器用于产生可以被舵机识别的脉冲宽度调制(PWM)控制信号,控制舵机所需的转动.姿态传感器用于反馈机器鱼的航向、俯仰、滚转3个姿态,每隔0.2 s反馈一组欧拉角形式的姿态数据.液位计用于反馈机器鱼的深度信息,机器鱼只有达到一定深度后才能进行滚转游动,深度过浅时胸鳍将摆出水面,导致机器鱼失去平衡.
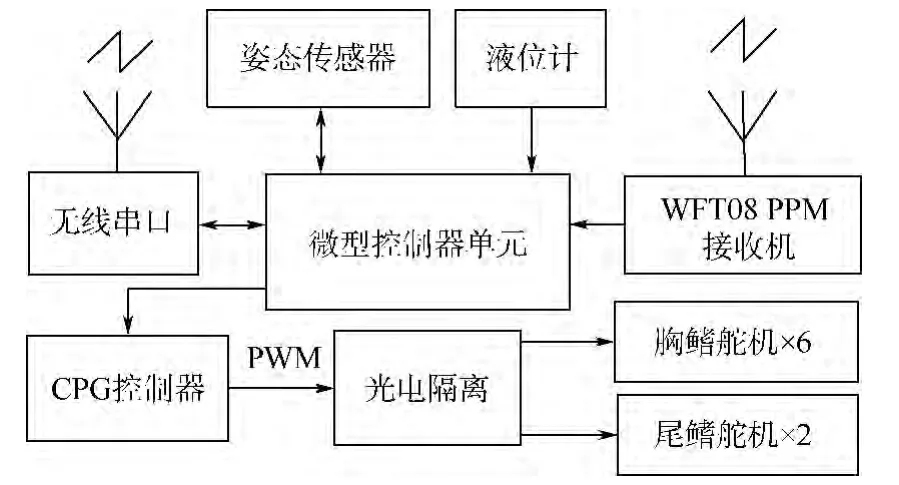
图3 硬件架构Fig.3 Hardware configuration
2 滚转运动机理
为了便于描述牛鼻鲼胸鳍摆动规律,建立如图4所示的坐标系,沿胸鳍宽度方向为展向,身体前后方向为弦向,在身体中轴线的中间位置建立笛卡儿坐标系,样机坐标系建立方式与其保持统一,如图2所示.根据牛鼻鲼胸鳍摆动规律[10]可知,其胸鳍沿弦向截面近似为正弦运动,其摆动中心线为x轴,展向截面运动可以近似为三次多项式函数,定义其摆动中心线为上下两个极限位置的对称中心线.

图4 牛鼻鲼胸鳍摆动规律曲线Fig.4 Oscillating discipline curves of Cownose Ray’s pectoral fins
通过观测牛鼻鲼在水中的游动姿态发现,牛鼻鲼在游动时,沿弦向方向胸鳍的摆动对称中心线与身体的朝向保持一致,如图5所示.牛鼻鲼在上浮游动时,身体朝上,胸鳍摆动中心线也朝上;水平游动时身体保持水平,胸鳍摆动中心线也保持水平;下潜时,胸鳍摆动中心线也朝下.因此可以得出,胸鳍摆动产生的平均推力与摆动对称中心线的方向保持一致.

图5 不同游动姿态下的牛鼻鲼胸鳍摆动规律Fig.5 Oscillating disciplines of Cownose Ray’s pectoral fins in different swimming poses
因此,若控制一侧胸鳍摆动中心线上偏,另一侧胸鳍摆动中心线下偏,则一侧产生斜向上的推进力Fwr,相应的另一侧产生斜向下的推进力Fwl,两侧的推进力会产生翻滚力矩.如图6所示,机器鱼左侧胸鳍中心线下偏,右侧中心线上偏,则其在向前游动的同时,会向左侧滚转.反之,则机器鱼向右侧滚转.
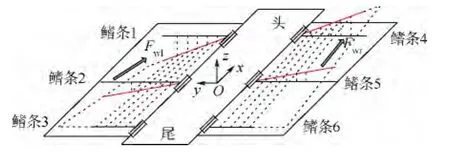
图6 胸鳍摆动中心偏置示意图Fig.6 Oscillating center bias schematic of pectoral fins
机器鱼样机的第i根鳍条摆动中心线的位置如图7所示.机器鱼鳍条摆动的两个极限位置的对称中心线为鳍条摆动中心线.则Ribias是第i个鳍条单元的摆动中心线与y轴之间的夹角(规定逆时针为正),称为振幅偏置,同时,定义

式中:ΔRijbias为第i根鳍条的振幅偏置与第j根鳍条摆动偏置的差值.
为了度量胸鳍摆动中心线的倾斜程度,定义

式中:Ubias为常数,其值为正时,左侧胸鳍下偏,右侧胸鳍上偏,反之,则左侧胸鳍上偏,右侧胸鳍下偏,且Ubias的绝对值越大,中心线倾斜角越大.
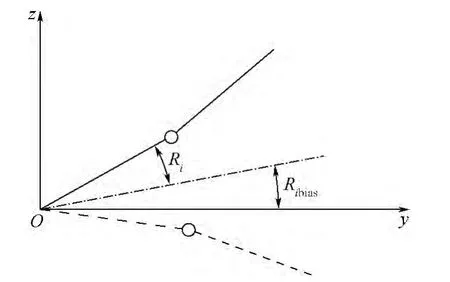
图7 鳍条摆动中心线定义Fig.7 Definition of fin oscillating center line
3 基于CPG的模糊控制器设计
3.1 CPG控制器设计
为了更好地模拟自然原型胸鳍的摆动规律,样机的鳍条按正弦规律摆动.但是,采用插值法输出正弦信号时,若振幅、相位等参数改变则容易导致输出信号突变等问题.因此,为了实现胸鳍条单元的柔顺摆动及光滑的姿态切换过渡,本文参照两栖蛇机器人[12]、蝾螈机器人[13]以及机器鱼[8]的CPG模型,建立了适合本文的CPG模型.
本文中的CPG网络结构如图8所示,每个单元与其上下、左右相邻单元之间的连接关系均是双向的.前后单元的连接关系影响运动波沿鳍面的传递规律,进而影响机器鱼的前进速度及俯仰稳定.而左右单元的连接关系则影响机器鱼的航向稳定.
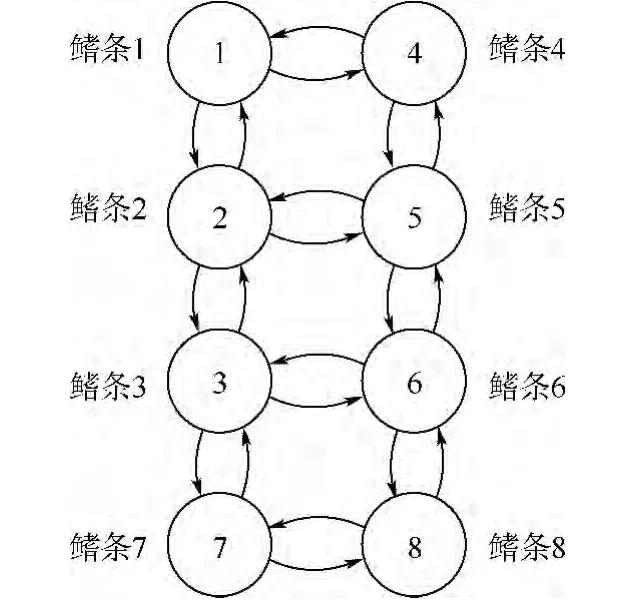
图8 CPG网络结构示意图Fig.8 CPG network structure schematic
CPG单元1~6分别对应鳍条1~6,用于控制胸鳍的运动;单元7、8分别对应鳍条7、8,用于控制尾鳍运动.单个CPG单元鳍条摆动的运动模型为

式中:φi、ri和 ribias分别为 i单元的相位、振幅与振幅偏置;υi为单元的摆动固有频率;ai和bi为两个正系数,会影响系统的响应速度及超调量.而单元与单元之间的耦合通过连接权重wij以及相位差Δφij实现;θi为胸鳍鳍条舵机的摆动角度.相位方程式(3)以及振幅方程式(4)能够较好地控制单元的相位以及振幅突变,从而抑制了机器鱼在运动过程中因控制参数的突变而带来的机械抖动问题,可增强游动的稳定性能.
3.2 模糊控制器设计
由于流固耦合问题,水下复杂流体扰动以及姿态传感器本身精度限制等因素,精确的机器鱼滚转控制动力学模型建立难度很大.考虑到模糊控制方法是基于专家经验的逻辑控制,可以避开动力学建模等难题,因此本文采用模糊控制方法进行机器鱼的滚转机动控制.借鉴模糊控制在机器鱼深度控制[9]、航向控制、转弯避障[14-16]等方面的相关研究思路,进行滚转角模糊控制器设计.
模糊控制器由规则库、推理机、模糊化接口、清晰化接口等部分组成.基于大量的专家经验,并通过一定的匹配规则,对于给定的输入,可以得到相应的输出.
本文中基于CPG的模糊控制器结构如图9所示,模糊滚转角控制器有两个输入变量及一个输出变量.输入变量分别为误差e与误差变化量ec,输出变量为与摆动偏置差值Ubias相关的过程变量ubias.整个控制器的输入为期望滚转角,输出为当前滚转角.在某一时刻t,给定期望滚转角rt与当前滚转角yt,则该时刻的误差以及误差变化量分别表示为:et=rt- yt,ect=et- et-1.
在实验中,机器鱼滚转角可以在[-π/2,π/2]之间变化,因此,误差的变化范围定为-π≤e≤π;根据机器鱼的滚转速度以及测试环境中水流扰动的大小,设定 ec的变化范围为-π/4≤ec≤π/4;而偏置差值的过渡变量ubias范围为 -3°≤ubias≤ +3°,对应偏置差值 Ubias范围为-12°≤Ubias≤ +12°.
为了与姿态传感器反馈的数据保持一致,本文规定机器鱼水平时,滚转角为0°;往左侧滚转,角度为正,往右侧滚转,角度为负.滚转角度偏差E、偏差变化率 Ec和控制量 U的论域定义为[-3,3],与 e、ec和 ubias分别对应比例因子为 k1=3/(π/2),k2=3/(π/4),k3=4.
在模糊化输入阶段,隶属度函数均采用三角函数,如图10所示,E、Ec均被分为7档,分别对应语言变量NB(负大)、NM(负中)NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大).
模糊规则库在建立时,采用IF-THEN的规则,根据大量实验得出的经验,总结归纳出了49条模糊控制规则,建立了模糊规则库,如表1所示.
在对U的清晰化输出阶段,隶属度函数仍采用如图10所示的三角函数,同样分为7档,采用中心-平均法求得对应的输出量为
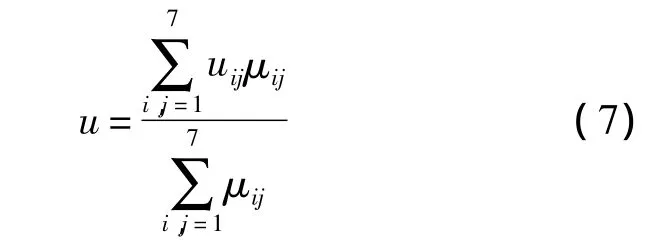
式中:μij为前件隶属度,通过 Mamdani推理方法(取小)求得;uij为第 ij条规则蕴含模糊集合中心值.

图9 基于CPG的模糊控制器结构Fig.9 Structure of fuzzy controller based on CPG

图10 各语言变量的隶属度函数Fig.10 Membership function for each linguistic variable
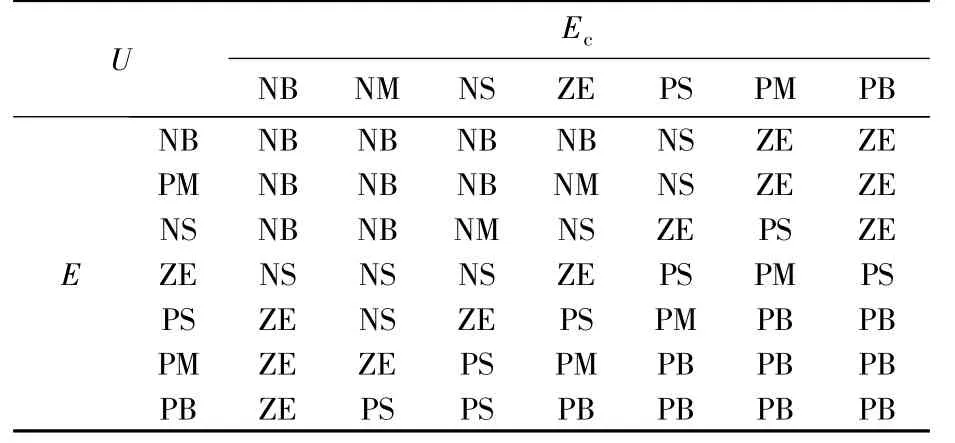
表1 模糊控制规则表Table 1 Rule table for fuzzy control
模糊控制器输出ubias需要乘以比例因子k3,得到偏置差值Ubias,然后输送给CPG控制器.CPG控制器中,υi、Ri和 Δφij等参数均保持不变,Ubias仅引起振幅偏置Ribias的改变,且规定两侧胸鳍的第3根鳍条(鳍条3,鳍条6)的振幅偏置R3bias=R6bias≡0°.鳍条1、鳍条2、鳍条4和鳍条5的振幅偏置Ribias可由式(1)和式(2)计算得到,即
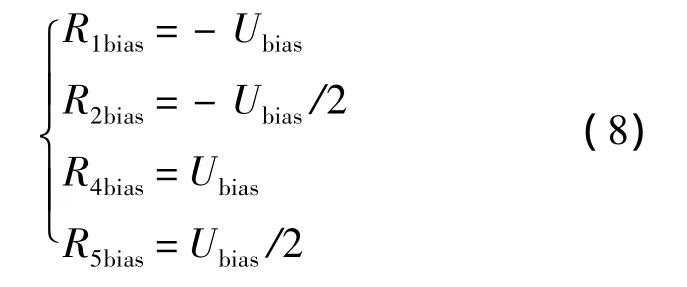
CPG控制器将更改后的运动参数进行迭代计算,输出计算结果,用于控制机器鱼胸鳍的摆动.
4 实验及分析
在机器鱼滚转机动控制实验中,图11为目标滚转角分别为60°、45°和30°时滚转角随时间的变化曲线.从图11(a)可以看出,机器鱼的最快滚转速度约为10(°)/s,稳态误差为 ±5°.误差呈周期性变化波动,而且周期与机器鱼胸鳍摆动的周期吻合,均为0.5Hz.当初始角度与目标角度相差变小时(见图11(b)、图11(c)),机器鱼仍能以较快的速度达到目标滚转角.目标滚转角度为45°和30°时,稳态误差仍为±5°以内.证明了本文所述模糊控制方法具有较好的稳定性.
通过实时发送目标滚转角度,并且配合机器鱼的航向控制,最终实现了机器鱼滚转机动避障游动,其避障过程的视频截图如图12所示.机器鱼翼展为920mm,两根竖直障碍物之间的间距为450mm,机器鱼鱼身厚度为200mm.机器鱼以90°的滚转角,通过了宽度不足翼展1/2的狭窄空间,证明了其游动的高机动性.

图11 滚转角随时间变化曲线Fig.11 Curve of roll angle changing with time
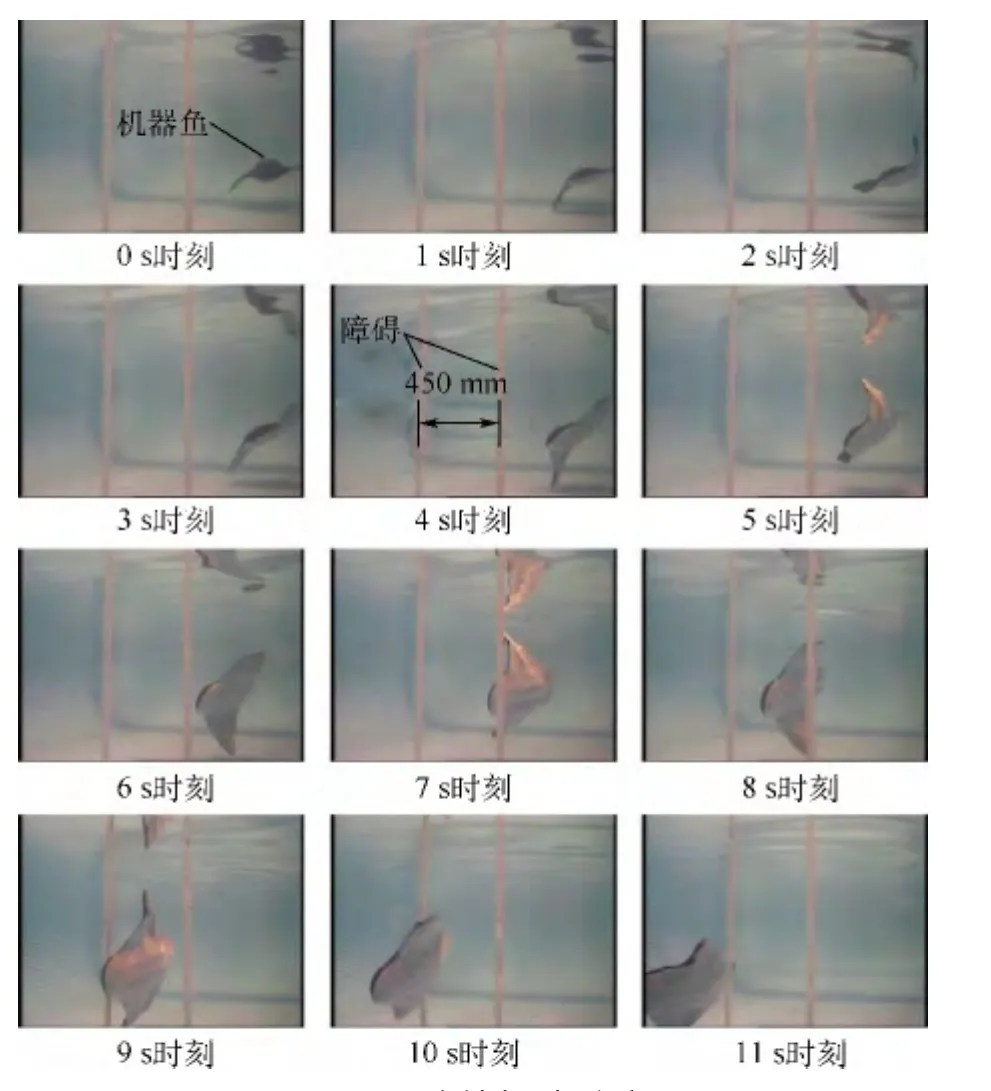
图12 滚转机动避障Fig.12 Obstacle avoidance by rolling maneuvering
5 结论
本文通过基于CPG的模糊控制方法实现了机器鱼的滚转机动控制并进行了相关实验.实验结果表明:
1)机器鱼能够以较快的速度达到目标滚转角度,最快滚转角速度为10(°)/s.
2)机器鱼在目标滚转角度分别为60°、45°和30°时,稳态误差均不超过±5°,证明控制方法具有较好的稳定性.
3)配合航向控制,机器鱼通过滚转游动实现了高机动性的避障游动,证明滚转控制一定程度上提高了机器鱼的机动性.
在实验中发现,机器鱼在滚转游动时航向会发生较大变化,原因是机器鱼有一定的滚转角后,航向与俯仰存在一定的耦合,机器鱼因胸鳍周期性摆动而带来的周期性俯仰带来了航向的不稳定.下一步工作中将对机器鱼的俯仰与滚转进行解耦,以实现机器鱼在给定滚转角下的稳定航向控制.
References)
[1] Domenici P,Blake R.The kinematics and performance of fish fast-start swimming[J].Journal of Experimental Biology,1997,200(8):1165-1178.
[2] Sfakiotakis M,Lane DM,Davies JB C.Review of fish swimming modes for aquatic locomotion[J].IEEE Journal of Oceanic Engineering,1999,24(2):237-252.
[3] Triantafyllou M S,Triantafyllou G S,Yue D K P.Hydrodynamics of fishlike swimming[J].Annual review of fluid mechanics,2000,32(1):33-53.
[4] Webb PW.Form and function in fish swimming[J].Scientific American,1984,251(1):58-68.
[5] Rosenberger L J.Pectoral fin locomotion in batoid fishes:Undulation versus oscillation[J].Journal of Experimental Biology,2001,204(2):379-394.
[6] Blake RW.Fish functional design and swimming performance[J].Journal of Fish Biology,2004,65(5):1193-1222.
[7] Suzuki H,Kato N,Suzumori K.Load characteristics of mechanical pectoral fin[J].Experiments in Fluids,2008,44(5):759-771.
[8] Cao Y,Bi S,Cai Y,et al.Applying coupled nonlinear oscillators to imitate swimming modes of cow-nosed rays[C]∥Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics.Piscataway,NJ:IEEE Press,2013:552-557.
[9] Niu C,Zhang L,Bi S,et al.Development and depth control of a robotic fish mimicking cownose ray[C]∥Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics.Piscataway,NJ:IEEE Press,2012:814-818.
[10] Zheng L,Bi S,Cai Y,et al.Design and optimization of a robotic fish mimicking cow-nosed ray[C]∥Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics.Piscataway,NJ:IEEE Press,2010:1075-1080.
[11] Cai Y,Bi S,Zheng L.Design optimization of a bionic fish with multi-joint fin rays[J].Advanced Robotics,2012,26(1-2):177-196.
[12] Ijspeert A J,Crespi A.Online trajectory generation in an amphibious snake robot using a lamprey-like central pattern generator model[C]∥Proceedings of the 2007 IEEE International Conference on Robotics and Automation.Piscataway,NJ:IEEE Press,2007:262-268.
[13] Ijspeert A J,Crespi A,Ryczko D,et al.From swimming to walking with a salamander robot driven by a spinal cord model[J].Science,2007,315(5817):1416-1420.
[14] Na SY,Shin D,Kim JY,et al.Obstacle recognition and collision avoidance of a fish robot based on fuzzy neural networks[M]∥Fuzzy Information and Engineering.Berlin:Springer,2007:337-344.
[15] Lee P J,Yen C H,Chan C L,et al.Implementation of a fuzzy control based intelligent robot fish[J].International Journal of Fuzzy Systems,2009,11(4):287-297.
[16] Lee P J,Lee M S,Wang R C.A fuzzy control based robotic fish with multiple actuators[J].International Journal of Fuzzy Systems,2012,14(1):45-53.
