大口径反射镜轻量化及其支撑结构设计
2015-03-18李畅,何欣
李 畅,何 欣
(1.中国科学院长春光学精密机械与物理研究所,长春130033;2.中国科学院大学,北京100049)
引 言
随着科学技术的不断发展以及对地观测要求的不断提高,高分辨率、宽覆盖的空间相机逐渐成为光学遥感器的发展趋势,因此,通常采用具有长焦距、大口径、大视场等特点的离轴三反光学系统[1-2]。大口径反射镜作为光学系统中的一个关键元件,在其制造装配、地面试验、运载发射以及在轨工作等过程中,会受到重力、温度变化以及振动等各种复杂环境因素的影响,而这些复杂的环境因素容易使其面形和位置(刚体位移和转角)发生变化,导致空间相机光学系统的光轴指向产生偏离、波像差变大,进而致使相机的分辨率下降、光学性能变坏。因此,如何设计精度较高的反射镜及其支撑结构,以减弱或消除上述各种环境因素变化对相机光学系统的影响,始终是国内外科研人员在空间相机研制过程中的重要研究内容和方向[3-4]。
基于此,本文中对某超宽覆盖空间相机的主反射镜进行了设计研究,其外形尺寸为800mm×400mm,采用SiC材料制造,属于大口径反射镜。为了完成高比刚度的反射镜设计,且满足光学成像要求,作者主要在反射镜支撑方式选择、支撑结构设计及镜体轻量化等方面进行了分析优化,并利用环境试验进行了上述组件结构的稳定性测试。
1 支撑结构设计
1.1 支撑方式和支撑点选择
由于相机采用全反射光学系统,反射镜的背部不参与光束传输,因此,常采用刚度较高的背部支撑方式[5]。

对于背部支撑方式,设镜面在重力下变形量为δ,有如下经验公式[6]:式中,δ为能接收的镜面变形峰谷(peak valley,PV)值,通常PV值取波长的1/10,ρ为材料的密度,g为重力加速度,r表示反射镜半径(长条形反射镜即为对角线长度的一半,下同),E为材料的弹性模量,t代表反射镜厚度。由(1)式即可得到主镜的厚度t=93mm。
支撑点数量对反射镜镜面变形影响较大,定义最少支撑点数为N,有如下规律[7]:

将主镜各参量代入(2)式中,可推算出N=3.4。由于上述经验公式计算的结果未考虑反射镜镜体的轻量化,且根据反射镜半运动学安装原理中支撑点分布、自由度约束以及结构支撑的稳定性等因素,若选用4点支撑方式,必须采用多层支撑形式以满足自由度约束要求,造成支撑结构刚度低、质量大、装配难度高等缺点,因此,本文中选用背部3点支撑方式,以满足主镜对支撑结构尺寸、质量和自由度的要求。
对于主镜背部3个支撑点,其分度圆半径R用以下方法确定[8]:

由于主镜为长条形反射镜,在宽度方向上,支撑点应尽量靠近两边,提高宽度方向的刚度,在长度方向上,取两支撑点间距S =。
1.2 柔性支撑结构设计
在主镜支撑结构上减弱了个别方向上的刚度,引入了一定的柔性,以此来抵消反射镜由于温度变化产生的热应力和微小变形。柔性铰链被广泛应用于支撑结构的柔性设计领域,其具有无机械摩擦、结构简单、释放自由度和灵敏度高等特点[9]。
柔性铰链通过在某一方向上切开一个柔性槽,以降低该方向上的刚度,体现其柔性,使其能够产生微小变形,释放热应力,只存在一个柔性槽的柔性铰链被称为单向柔性铰链,而在一般情况下,往往将多个柔性槽成组使用,即可实现在多方向上的柔性,达到释放多个自由度的目的,将其称之为多层柔性铰链。
由于主镜采用背部3点支撑方式,在反射镜长度方向上对称分布支撑点位置,基于半运动学安装定位原理,每个柔性支撑结构需要约束两个方向的自由度,因此,采用3层组合式柔性铰链,释放4个方向的自由度,参考Bipod双脚架设计原理,设计如图1所示柔性支撑结构,其分为两个部分,上部分与反射镜支撑孔粘接,下部分与支撑背板连接,上下两部分通过螺钉连接。3个柔性铰链对心安装,便可以恰好约束镜体6个方向的自由度,又不会因为过定位产生装配应力。支撑背板的作用是固定连接3个柔性支撑结构,将反射镜固定安装在框架指定位置,因此采用高强度的加强筋与薄壁组合的结构形式,组成多个结构封闭的四边形单元,以达到支撑背板高刚度的的要求。

Fig.1 Flexible supporting structure
对比材料各项性能指标,综合考虑力学性能、热性能、对空间环境的适应性以及加工工艺性等因素,选用线胀系数经过特殊匹配的Invar作为反射镜柔性支撑结构的材料,采用比刚度高、导热性好、线胀系数低的高体份SiC/Al复合材料作为支撑背板的材料。
根据上述支撑方式和支撑结构的设计结果,主镜支撑结构如图2所示。

Fig.2 Sketch of support structure for primary mirror
2 镜体轻量化设计
在反射镜背部,布置一系列形状规则的三角形轻量化孔,具有轻量化率较高、刚度好、“网格效应”低、加工制造工艺成熟等优点[10]。
根据背部3点支撑形式,建立反射镜镜体初始结构模型如图3所示,其中各结构尺寸参量的初值为:支撑孔直径D=88mm,支撑孔壁厚td=20mm,轻量化孔直径d=16mm,镜体厚度 H=93mm,切角 α=40°,镜面厚tf=8mm,外壁厚ta=8mm,加强筋厚tb=8mm。

Fig.3 Initial structure model of mirror
为确定主镜镜体最优的结构尺寸,在反射镜刚度最大和质量最小之间取得最佳平衡,需要对镜体进行优化设计。首先建立反射镜的有限元模型,分析其在1g重力作用下的变形,并提取镜面最大变形结果,生成优化过程中所需要的分析文件,然后,选择优化处理器,确定目标函数为反射镜质量最小,状态变量为1g重力作用下的镜面最大变形结果,设计变量为反射镜结构尺寸参量,选择背部3点支撑约束,指定优化方法及循环控制方式,便可以进行优化分析。
但是,在主镜结构优化设计过程中,影响反射镜镜体质量和刚度的结构参量有很多,若都进行优化设计,会使设计变量增多,迭代次数增加,运算效率降低,甚至导致无法收敛。由于各结构尺寸的影响程度各不相同,可以首先分析各参量对镜体质量和1g重力条件下镜面最大变形量的影响,如图4和图5所示。因此,在进行结构优化分析之前,先确定影响较小的结构尺寸参量,降低计算规模,再对影响较大的结构尺寸参量进行多变量优化。

Fig.4 Relationship between structure size and mirror quality

Fig.5 Relationship between structure size and the maximum deformation of mirror
由图4可以看出,镜体厚度H、镜面厚tf、加强筋厚tb和外壁厚ta这4条曲线斜率较大,随着各结构尺寸的增加,镜体质量m显著增大,而其它参量变化对镜体质量基本没有影响。同样,从图5中可以看到,镜体厚度H,镜面厚tf和支撑孔径D这3条曲线的斜率较大,对1g重力条件下镜面的法向最大变形量Dmax影响较大。
综合比较,本文中将镜体厚度H、支撑孔径D、镜面厚tf、外壁厚ta、加强筋厚tb这5个结构尺寸参量作为设计变量,镜体质量m作为优化分析的目标函数,1g重力条件下镜面的法向最大变形量Dmax作为状态变量进行多参量优化,其它结构尺寸仍采用初始值不变,优化迭代过程如图6所示。

Fig.6 Relationship between structure parameters and iteration number
根据各结构尺寸参量最终取值,建立反射镜镜体模型,如图7所示,SiC反射镜镜体的质量为18.54kg,与相同尺寸的实心镜坯相比,轻量化率高达80.5%,在1g重力条件下,反射镜镜面的法向最大变形量为5.23μm。

Fig.7 The final structure model of mirror
3 反射镜组件有限元分析
对经过分析和优化设计后的主镜组件进行有限元分析,在建立结构的有限元模型时,以六面体Hex6单元为主,以提高分析精度和效率。利用有限元分析软件,分析得到主镜组件在重力和温度影响下的变化结果,见表1和表2,模态分析得到1阶频率如图8所示。

Table 1 Influence of gravity on primary mirror
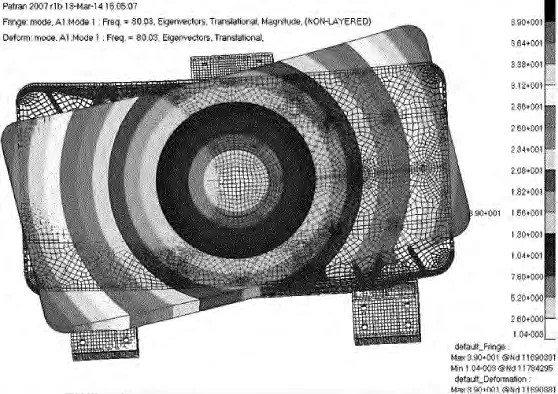
Fig.8 The first-order frequency of primary mirror
由分析结果可以看出,主镜组件在重力和温度变化作用下,表征面形变化的PV值和均方根(root mean square,RMS)值,以及表征位置变化的位移值和转角值均能满足设计要求,1阶频率为80.03Hz,满足卫星对载荷特征频率大于60Hz的要求,因此,主镜组件结构具有较好的力学适应性、温度适应性和动态刚度。
4 力学振动试验

Fig.9 Vibration test of primary mirror
为了验证上述有限元分析结果的正确性,以及对实际加工装配后的主镜组件结构的稳定性有一个客观评价,对主镜进行了1g正弦扫频试验,测试结构的实际模态,如图9所示。振动响应曲线如图10所示,纵坐标表示对测点加速度响应值Ma求以10为底的对数。从响应曲线可以看出,主镜组件的实际1阶频率为73.06Hz,动态刚度较高,且与有限元分析误差不到10%,说明了有限元分析结果精度较高。

Fig.10 Response curve of 1g sinusoidal vibration
5 结论
结合自由度理论和柔性铰链原理,完成了主镜支撑方式和柔性支撑结构的设计,利用参量化建模方法,完成了镜体的轻量化设计与优化。最后,进行了相应的有限元分析,分析结果显示,组件具有较好的力学和热学性能,1阶频率较高,说明主镜组件镜体轻量化及柔性支撑结构设计合理,满足设计要求。
[1] XIONG Z,YUAN X D,LIU Q G,et al.ANYSYS finite element analysis and experiment study of large aperture reflectors[J].Laser Technology,2009,33(1):107-109(in Chinese).
[2] XU T Z,XIN H W,HE X.Random vibration fatigue analysis for mirror component of space camera [J].Optical Technique,2013,39(6):549-552(in Chinese).
[3] AHMAD A.Handbook of optomachanical engineering[M].Boca Raton,USA:CRC Press,1997:298.
[4] LI C,HE X.Design and optimization of trussed structure for space camera based on Rayleigh algorithm[J].Infrared and Laser Engineering,2012,41(9):2405-2409(in Chinese).
[5] ZHANG X J,LI Z L,ZHANG Z Y.Space telecope aspherical mirror structure design based on SiC material[J].Infrared and Laser Engineering,2007,36(5):577-582(in Chinese).
[6] WANG Y,ZHANG J X.Optimization and analysis for the support of the large aperture telescope primary mirror[J].Opto-Electronic Engineering,2009,36(1):107-113(in Chinese).
[7] FAN Y C,CHAI F M.Support design for primary mirror with large aperture of optical remote sensor[J].OME Information,2010,27(5):16-21(in Chinese).
[8] YODER P R.Opto-mechanical system design[M].2nd ed.New York,USA:Marcel Dekker,1993:376.
[9] BAO H,LI Z L.Design of the strip SiC mirror supporting structure and lightweight[J].Optical Technique,2008,34(4):593-596(in Chinese).
[10] HAN Y Y,ZHANG Y M,HAN J C,et al.Optimum design of lightweight silicon carbide mirror[J].Opto-Electronic Engineering,2006,33(8):123-135(in Chinese).
