基于图像式传感器的铁路轨距检测系统研究
2015-03-18闵永智王红霞党建武
闵永智,王红霞,康 飞,党建武
(兰州交通大学自动化与电气工程学院,兰州730070)
引 言
高速铁路不仅体现轨道和机车车辆等技术的最高水平,同时对其安全性提出更高的要求。而轨道作为高速铁路行车的基础,由于各种因素的影响,使钢轨产生形变、磨损或断裂等损伤,对车辆的安全运行构成很大威胁。目前,在轨道维护方面,轨检车正逐步取代人工道尺巡检,但由于轨检车价格昂贵,铁路局现有轨检设备检测频率无法满足规程要求。因此,在全路各工区普及自动化轨检设备是目前亟待解决的问题。
目前传感器在铁路安全维护方面应用广泛,其中激光传感器的精度高、稳定可靠等优点,在当前轨道测量方面得到较好体现[10]。因此,本文中提出一种采用激光传感器扫描轨道边界的几何形状进而快速提取轨道轮廓光带中心线方法。
1 视觉轨距检测系统及工作原理
轨检车主要利用视觉检测系统测量轨道横断面几何参量,并结合后期多传感器数据融合进行修正。图1为视觉轨距检测系统示意图,该系统由CCD高速图像式传感器与线激光传感器组成。CCD高速图像式传感器通过线激光传感器在轨道表面法向的反射成像生成图像数据,图像数据进入图像处理中心并通过去噪前置与距离变换算法(pre-noising and distance transform,PNDT)得到轨道横断面单像素几何参量。

Fig.1 Vision gauge detection system
2 基于PNDT的轨道轮廓快速提取方法
2.1 去噪前置处理
本文中采用去噪前置处理提高传统光带轮廓中心线提取算法对图像帧处理速度的影响。
首先,对采集到的原始灰度图像采用强对比度拉伸算法提高图像信息熵[11],并结合指数变换进行图像增强[12],以提高激光光带信息比。此外,可利用参考文献[13]中查找表的方法快速实现这一过程。其中指数变换定义如下式所示:

式中,g(x,y)和f(x,y)分别代表输出图像与输入图像,a,b和c均为可调参量。虽然基于强对比度拉伸和指数变换的图像增强算法能够有效抑制背景噪声,但对激光光带边缘的散斑噪声未被有效地改善[14],故选用滤波器来消除冲击噪声对光带边缘准确定位的影响。
分别选用高斯平滑滤波与中值滤波两种高效且常用的滤波器进行比较。定义窗口为W,中值滤波器定义如下式所示:

式中,gr,c为窗口W中n个灰度值样本排序后的中值的真值,r,c 为灰度值 gr,c的位置,median 为图像中的一点的灰度值用该点邻域内的各点灰度值的中值代替,gr-i,c-j′为窗口W中n个包含有噪声的灰度值,ri,c-j为图像上灰度值为 gr-i,c-j′的横纵坐标。
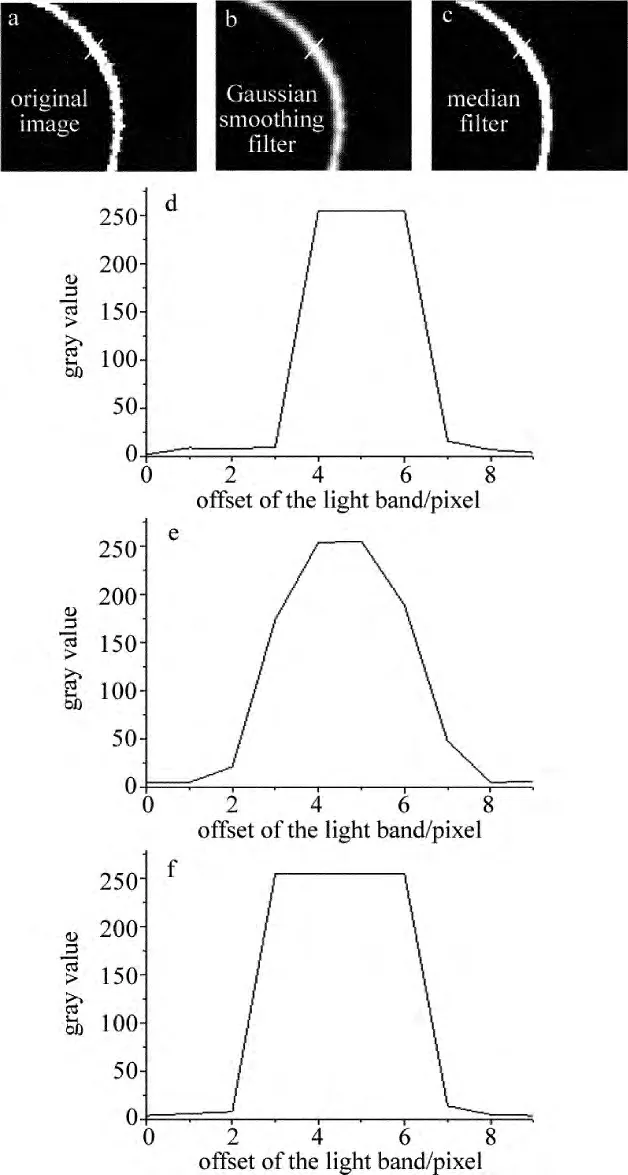
Fig.2 Comparison of two kinds of denoising results
由于中值滤波器需要对窗口区域内所有的像素灰度值进行重新排序,并以中值代替当前像素灰度值,因此结果存在边缘偏移的现象,且该算法在速度上不具备优势。
三是从人才培养的视角探讨当前社会组织专业人才培养状况。郁建兴等(2012、2013)从社会组织人才培养视角考察当前美国、德国的社会组织人才培养体系,刘惠苑等(2011)提出应探索建立高校学历教育、专业培训、知识普及有机结合的社会组织人才培养体系,同时加快社会组织人才培育基地和省、市、县三级结合的人才培训网络建设。郭德厚等(2012)以惠州学院为例,提出社会组织参与高校人才培养工作具有资源、信息、实践等优势。因此,提出应建立社会组织参与人才培养方案制定、参与师资结构改善、参与实践教学、激励人才培养、支持人才就业工作的机制,促进社会力量高校人才培养工作。
2维高斯滤波器定义为下式:

由(3)式可知,σ表示呈正态分布随机变量的方差的平方根,gσ(r)与gσ(c)分别表示σ为某一值所对应的1维高斯滤波器。故可将一个2维高斯滤波器gσ(r,c)分解为两个垂直方向上的1维函数 gσ(r),gσ(c)进行运算,同时采用参考文献[15]中的方法构造动态感兴趣区域(region of interest,ROI)缩小图像处理区域,提高检测效率。
图2a~图2c分别为原始图像和采取两种不同方法得到的去噪处理结果,图2d~图2f分别对应在图2a~图2c的同一位置10pixel剖面灰度曲线,从图2d~图2f中可以看到,高斯平滑滤波处理结果的边缘更符合光带能量分布的实际情况,处理后不会造成光带偏移。
因此,由上述分析可知,高斯滤波器是对轨道轮廓光带信息进行平滑处理的最优选择。
2.2 精确阈值分割处理
为了提高检测速率以及克服简单阈值分割会丢失部分激光光带有效信息的缺点,可对去噪后图像进行精确阈值分割处理。其中阈值分割定义如下式所示:

式中,S是输出区域,R是图像感兴趣区域的灰度值,gmin与gmax分别为阈值边界。
视觉轨距检测系统的精度要求为±1mm,经图像式传感器标定后对应图像像素为±2.35pixel,向下取整为±2pixel。针对信息丢失情况,分别选用3种阈值进行处理并分析误差,实验结果如图3所示。

Fig.3 Results of three threshold segmentation processing
对阈值做边缘溢出处理是为了保证光带轮廓信息的完整性,由表1可知,在边缘像素丢失、溢出的3种不同情况下,检测精度均满足±2pixel的精度要求。
故对去噪图像做精确阈值分割处理能够保证精度的同时有效提高帧处理速率。

Table 1 Analysis of threshold segmentation processing results
2.3 距离变换法提取激光光带中心
传统光带中心提取算法主要通过对存在噪声影响的灰度图进行计算,而二值图像的距离变换所返回的结果是利用距离值代替灰度值所形成的新的灰度图像,该灰度图像的灰度值即每个像素与其最近背景像素的距离值[16]。
距离变换定义如下。距离变换DX(p)为区域X中第1个不包含p的腐蚀的大小,p为区域X内任意一点,如下式所示:

式中,N为整数集合,m为连通子区域的个数,Θ为腐蚀运算,B为集合,可知DX(p)就是p与背景间的最小距离。
经过距离变换后的灰度图像依据其灰度值所对应的距离值转换成等高线图像,由等高线图像可准确地定位区域脊线,且该脊线是到区域边界相等距离的点集,即轨道轮廓中心线准确位置。
距离变换法提取激光光带中心运算具体过程如下:(1)将二值图像背景区域距离值D初始化为D=0,区域内所有点的距离值初始化为2b-1,其中b为像素位数;(2)选用5×5掩码对初始化距离值进行处理,取最小值为新灰度图像的灰度值。该距离与真实笛卡尔坐标系距离最大偏差为2%[17];(3)分别从垂直方向对图像进行两次扫描,扫描返回距离值作为转换后新的灰度图灰度值,如图4a所示;(4)依据新灰度图的距离等效灰度值将图像转化为等高线图像,如图4b所示;(5)该等高线图像的脊线(区域距离极大值)即是光带中心线。

Fig.4 Distance transformation processing a—distance transform image b—contour lines image
距离变换法以等高线图像求取脊线对几何中心准确定位,故可以准确提取中心线。PNDT法提取轨道轮廓光带中心线的流程如图5所示。

Fig.5 Processing of rail contour centerline extraction with PNDT method
3 实验分析
为了验证基于PNDT方法的视觉轨距检测系统的精度与帧处理速率,通过一个长30m的1∶3模拟试验段进行数据分析。系统选用工业相机参量为:像素尺寸 5.6μm ×5.6μm,帧率 150frame/s,信噪比大于60dB。选用线激光传感器光源为红光,扇角10°,波长650nm。实验中选用处理器为 Intel(R)Core(TM)i5-3210 CPU 2.50GHz。图6所示为模拟轨道检测平台。
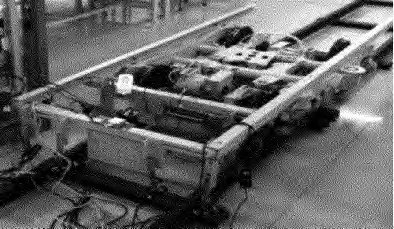
Fig.6 Simulation of vision gauge detection platform
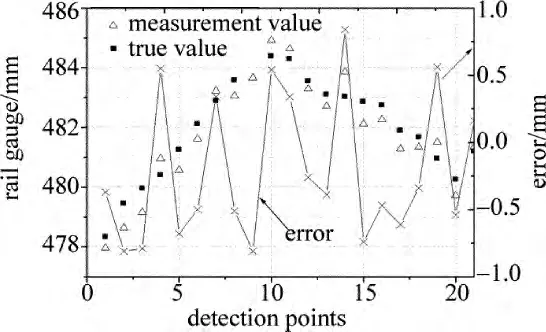
Fig.7 Curve of measurement results,true value and error

Table 2 Analysis of system uncertainty
图7为长5m,20点的系统实测轨头下16mm处轨距测量值与道尺测量值比对及其误差曲线,选用的JGC-4A型“0”级电子轨距尺最大误差为±0.2mm。由图可知实测误差保持在-0.8mm~+0.8mm,满足视觉轨距检测系统精度要求。表2中为10个轨距点测量结果系统不确定度分析。不确定度是指由于测量误差的存在,对被测量值的不能肯定的程度。反之,也表明该结果的可信赖程度。其中,A类不确定度为对观测列进行统计分析的方法来评定标准不确定度,用实验标准偏差来表征。B类不确定度则用不同于对观测列进行统计分析的方法来评定标准不确定度。合成不确定度为测量结果标准偏差的估计值。由测量结果可知,该系统实验室最大合成不确定度为0.52mm,满足系统容许最大误差范围。
该系统误差主要来自阈值分割与误差图像式传感器标定误差,由于精确阈值分割采用溢出1pixel处理,故其造成误差不大于0.5mm。图像式传感器双目标定过程误差不超过1pixel,即不大于±0.5mm。因此系统整体误差可以保持在-1mm~+1mm,与实验结果保持一致。
由于试验段无法进行高速检测,故针对系统检测速率的验证由图像帧处理速度进行分析。通过对1000帧图像的处理速度统计,该系统平均帧处理速率为14.35m/s。
4 结论
采用激光传感器与CCD图像式传感器相结合的原理建立满足实时在线高速检测要求的视觉轨距检测系统,针对传统光带中心线提取算法以灰度图为主,帧处理速度无法满足高速检测要求等问题。提出基于PNDT法的轨道轮廓中心线快速提取方法,将去噪过程前置并结合精确阈值分割提高处理速度,利用距离变换求取区域脊线准确定位中心线。最后将PNDT法应用于视觉轨距检测系统。实验结果表明:基于PNDT法的视觉轨距检测系统整体检测精度在-1mm~+1mm,图像平均帧处理速率为14.35m/s可满足80km/h~120km/h的工务轨道车实时在线轨道检测需要。
[1] SHOLL H,AMMAR R,GREENSHIELDS I,et al.Application of computing analysis to real-time railroad track inspection[C]//Automation Congress.New York,USA:IEEE,2006:1-6.
[2] HUANG J X.The application study of image processing in track detection[D].Beijing:Beijing Jiaotong University,2007:33-83(in Chinese).
[3] LIU T,REN S W,XU G Y,et al.Upgrading of gauge-alignment system of type GJ-4 track inspection car[J].China Railway Science,2006,32(6):137-140(in Chinese).
[4] RESENDIZ E,HART J M,AHUJA N.Automated visual inspection of railroad track[J].Intelligent Transportation Systems,2013,14(2):751-760.
[5] RIZZO P,CAMMARATA M,BARTOLI I.Ultrasonic guided wavesbased monitoring of rail head laboratory and field tests[J].Advances in Civil Engineering,2010,6(10):1-13.
[6] HU K,ZHOU F Q,ZHANG G J.An rapid sub-pixel accuracy extraction method for structured light stripe center[J].Chinese Journal of Science Instrument,2006,27(10):1326-1329(in Chinese).
[7] LEI H J,LI D H,WANG J Y,et al.An rapid detection method structured light stripe center[J].Huazhong University of Science and Technology(Natural Science Edition),2003,31(1):74-76(in Chinese).
[8] LI Z W,WANG C J,SHI Y S.An extraction algorithm for combination of gradient sharpening and optical center of gravity method[J].Chinese Journal of Image and Graphics,2008,13(1):64-68(in Chinese).
[9] LI M,FENG H J,XU Z H,et al.A corrected image contour extraction method using intensity information for structured light[J].Optical Engineering,2005,32(2):30-32(in Chinese).
[10] ZHAN L,YU L,XIAO J,et al.Calibration method research of laser camera sensor in track detection[J].Journal of Mechanical Engineering,2013,49(16):39-47(in Chinese).
[11] MI C Z,XIE Z J,CHEN T,et al.The key technology of image enhancement and edge extraction of heavy rail[J].Optics and Precision Engineering,2012,20(7):1645-1652(in Chinese).
[12] OUYANG Ch S,YUAN J,TIAN J W,et al.An enhancement method for X-ray image using rough sets and human visual system[J].Journal of Xi’an Jiaotong University,2009,43(6):48-51(in Chinese).
[13] SONKA M,HLAVAC V,BOYLE R.Image processing analysis and machine vision[M].3rd ed.Beijing:Tsinghua University Press,2007:1-613(in Chinese).
[14] ZHAO B H,WANG B X,ZHANG J,et al.Center extraction method for rough metal surface light strip[J].Optics and Precision Engineering,2011,19(9):2138-2145(in Chinese).
[15] ZHAO J,ZHAO J,ZHANG L.Image processing and feature extraction for structured light images of welded seam [J].Journal of Xi’an Jiaotong University,2013,47(1):114-119(in Chinese).
[16] WANG M J,YANG L,WANG X,et al.The class euclidean distance transformation class features extraction with a simplified pulse coupled neural network traffic sign image[J].Optics and Precision Engineering,2012,20(12):2751-2758(in Chinese).
[17] SAPIRO G.Geometric partial differential equations and image analysis[M].3rd ed.London,UK:Cambridge University Press,2006:1-532.
