HOLLiAS-MACS V6.5.2系统闭环控制器在工程应用中的技巧探讨
2015-03-15胡昌盛神华福能发电有限责任公司福州泉州362712
胡昌盛(神华福能发电有限责任公司,福州 泉州 362712)
王嘉毅,陆永卿,李宝兴(上海电力建设启动调整试验所,上海 200031)
HOLLiAS-MACS V6.5.2系统闭环控制器在工程应用中的技巧探讨
胡昌盛(神华福能发电有限责任公司,福州 泉州 362712)
王嘉毅,陆永卿,李宝兴(上海电力建设启动调整试验所,上海 200031)
通过介绍和利时HOLLiAS-MACS V6.5.2分散控制系统(DCS)闭环控制器在几种典型应用过程中遇到的问题,分析了其模拟量手操器HSVMAN、PID控制器HSVPID、积分器HSINTG的运算原理,阐述了算法块在典型应用中的注意事项与解决方案,为其它工程应用与国产DCS的完善发展提供借鉴。
和利时;分散控制系统;手操器;PID;积分器;对策
近年来,分散控制系统DCS国产化进程飞速发展。2013年,和利时在与多家国外著名公司激烈的竞争中,以优异的表现成功中标鸿山2×1000MW超超临界燃煤发电机组现场总线DCS控制系统,预示着国产DCS系统新技术发展得到业内肯定和认可,项目的重大突破为和利时全面拓展高端火电市场业务又向前迈出了关键的一步。由于工程项目人员、系统研发人员对闭环控制器的认识不同,工程实际又对控制器的应用习惯、操作方法、控制性能等方面有着更高的要求。在鸿山项目模拟量控制系统调试过程中,和利时HSVPID+HSVMAN等功能块在典型控制策略的实现上遇到的几个问题,结合工程实际采取了可行的解决方案,使得项目调试过程顺利进展,也为HSVPID、HSVMAN、HSINTG算法块在工程应用上提供了使用技巧以及借鉴经验。
1 系统概述
1.1 控制系统简介
神华福能发电有限责任公司(以下简称鸿山电厂)DCS控制系统采用杭州和利时公司生产的HOLLiAS-MACS V6.5.2装置,DCS与DEH国产一体化配置,在DCS现场设备层全面采用MACS-SM控制站集成PROFIBUS现场总线技术。整套分散控制系统包括数据采集系统DAS、顺序控制系统SCS、炉膛安全监控系统FSSS、模拟量控制系统MCS、小汽轮机控制系统MEH+METS、数字式电液控制系统DEH,以及脱硫控制等系统,其中FSSS、MEH、DEH和ETS 基本采用成熟的常规控制系统。
1.2 HSVPID、HSVMAN工作模式
HSVPID、HSVMAN在线SAMA图如图1所示,对每个引脚进行说明。
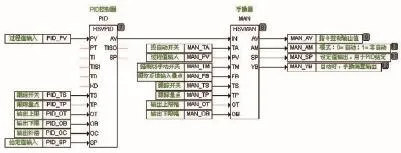
图1 HSVPID、HSVMAN引脚说明
1.2.1 HSVMAN工作模式
模拟手操功能块(HSVMAN)手操器有四种工作模式:手动、强制手动、自动、跟踪。优先级:跟踪>强制手动>手动/自动。根据内部参数RM的值来判断运行工作方式,0:手动;1:自动;2:跟踪;3:强制手动。一般在组态过程中将MAN_AM赋值给PID_TS,MAN_SP赋值给PID_SP,MAN_AV赋值给PID_ TP,实现工作模式之间的无扰切换。
如果跟踪开关TS=1(MAN_TS=1)时, RM=2、AM=1(MAN_AM=1,非自动),手操器进入跟踪方式,此时对RM的其他赋值均无效。当跟踪开关TS由1变为0时,手操器切换为跟踪前的模式(上一次工作模式)。
1.2.2 HSVPID输出特性
当跟踪备件满足(MAN_AM=1, 非自动)PID_TS=1时,PID在跟踪工作方式,PID单元停止演算,其值随被跟踪量而变化,AV=TP。
当跟踪条件不满足(MAN_AM=0,自动),PID_TS=0时,在自动方式下,PID按传递公式进行运算。AV(K)=AV(K-1)+du+OC+dk。du:本次计算得出的比例+积分项;dk:本次计算得出的微分项;OC:输出补偿项。
2 工程应用中应注意的问题
2.1 关于纯积分控制的使用
原鸿山电厂汽轮机一级大旁路压力设定点发生器采用HSVPID实现,比例带PT设置很大,使比例作用减小几乎为零,积分时间设置TI=5200s,作为积分控制器使用,作用方向为正作用,输出下限OB=1,输出上限OT=12。高旁压力设定爬坡的简化组态逻辑如图2所示。
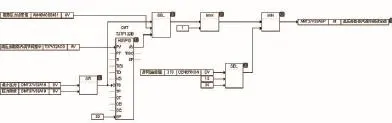
图2 高旁压力设定爬坡逻辑
旁路系统在汽机冲转并网过程中全程自动控制主汽压力,启动初期,主蒸汽压力为0,旁路阀处于最小开度位置10%,由于积分作用使HSVPID输出至下限1MPa。随着锅炉升温升压,为维持1Mpa主汽压力,高压旁路阀逐渐开大。当旁路阀开度大于预设的50%开度时,最小压力模式消失,进入压力爬坡模式,根据积分作用方向,为维持此阀位,应使压力设定点发生器HSVPID的输出随锅炉燃烧率按照一定的速率增大。
而在实际投用中发现,当高压旁路阀指令(PV)大于50(SP)时,压力设定点发生器仍不向上爬坡,致使随主汽压力上升,旁路设定值保持不变,旁路阀开至全开,如图3所示。
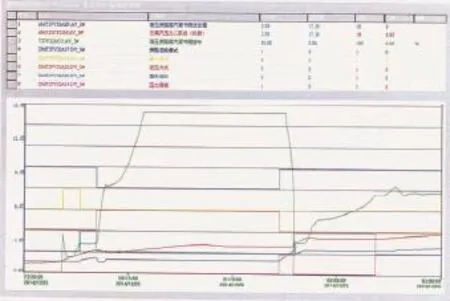
图3 高压旁路首次投用过程
经分析,和利时MACS VI系统HSVPID算法块当比例作用很小时,若积分使其朝一个方向输出至上限或下限时,输入偏差即使未达到积分分离值,积分分离也会动作,TISO=1,此时即使积分作用反向(PV>SP)亦不能改变其输出。因此在工程应用中,MACS VI系统HSVPID算法块不能将其比例项置零,作为纯积分器使用,这有别于其它部分DCS。于是使用单独的积分控制器(HSINTG)作为压力设定点发生器,工作正常。
积分控制器(HSINTG)功能块实现积分调节器功能,它在过程值与设定值偏差的基础上执行积分控制,且没有输出达上、下限后发生积分分离的问题,有效解决了HSVPID作为纯积分控制器出现积分分离现象。在火力发电厂中积分控制器在高旁压力设定点发生器、BTU热值校正器等慢速修正回路中运用较为广泛。
2.2 关于带超驰功能的手操器无扰切换的应用
以高加水位控制为例,常规单回路PID调节逻辑结构如图4所示。
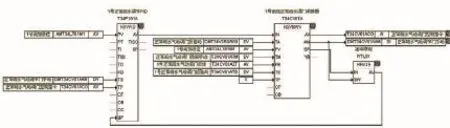
图4 高加水位控制
当模拟量手操器HSVMAN手动时(AM=1),SP=PV;从手动切换到自动时,SP保持当前值并可在操作面板输入,以保证方式切换时无扰。当超驰条件置位,TS=1时,AV输出超驰至跟踪量点TP,但此时手自动状态显示AM=1,SP会随PV的变化而变化;超驰条件复位后,手操器恢复到跟踪前的自动状态,由于SP已随PV发生改变,因此自动控制偏离了之前设置的正常值,不符合实际应用的要求。
针对上述问题,新增组态逻辑:在手操器PV输入前增加一个SEL选择块,当调门超驰关信号为真时选择当前的SP作为PV的
输入,来闭锁SP的变化,并在调门超驰关信号消失时反向延时1秒,恢复选择实际值作为过程值输入,避免切换时序的影响,使超驰动作结束后调门仍能控制系统稳定在正常的设定值范围内。通过逻辑闭锁实现在TS状态翻转过程设定值的保持,使带超驰功能的手操器做到真正的无扰切换。
2.3 关于调节回路闭锁增、减的实现
在调节回路中,除对设定值与实际值的偏差进行控制以外,经常会用到由于其它过程值或工况影响而需闭锁调节回路增、减的情况,如炉膛压力高闭锁送风机动叶增等。而在MACS VI系统中取消了上一版本中手操器闭锁增、减的引脚,同时HSVPID也不具备闭锁增、减的功能,因此常需要通过闭锁上限OT或下限OB来实现PID的禁增与禁减。以鸿山电厂水燃比控制中间点温度为例,如图5所示。
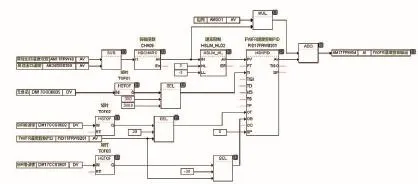
图5 中间点温度控制
其中HSVPID比例设置很小,作积分-微分控制器使用,积分时间正常时为300s,变负荷时切至2000s,使变负荷时积分也基本不起作用,微分增益Kd=0.3,微分时间Td=60s,作用方向为正作用。变负荷时,减负荷信号使上限OT闭锁,实现禁增;增负荷信号使下限OB闭锁,实现禁减。但在投用过程中却发现存在如图6所示曲线。
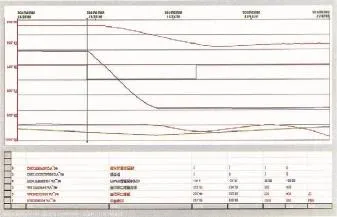
图6 中间点温度控制曲线
当33分18秒增负荷信号置“1”时,PID输出从-14.6开始斜坡上升,至36分46秒升至+13.9后保持,期间变化幅度为28.5t,变化率为0.137t/s,远大于该PID正常工作时应有的调节速度,给系统带来了较大的扰动。经分析,由于变负荷时积分时间为2000s,且输入偏差限幅为±3,积分作用最大输出速率为0.0015t/s,因此不可能为积分作用引起;而在33分18秒增负荷信号置“1”至36分46秒过程中,输入偏差存在上升趋势,那么上升的速率使微分产生超前控制作用,但此时即使上升速率放缓或为零,由于禁减信号使微分作用无法归零,造成了输出的快速上升,也因此36分46秒后输入偏差虽改为下降趋势,但禁减使其输出保持。这一现象同样会发生在PID禁增时,输入偏差下降的过程。所以当MACS VI系统HSVPID带有微分时,切忌使用该方式实现闭锁增、减功能。后与和利时研发人员进行研究,从HSVPID取一中间变量PID.U1(比例+积分项)与之前上、下限进行大、小选后输入OT、OB,如图7所示,使PID在禁增、禁减时工作正常。
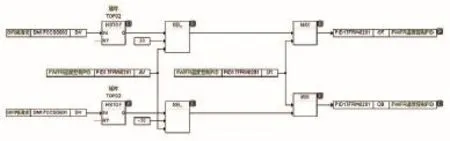
图7 修改后的HSVPID闭锁增、减逻辑
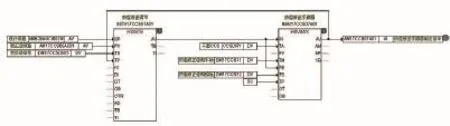
图8 热值校正逻辑
2.4 关于输出偏置功能的注意
和利时模拟量手操器HSVMAN操作面板有一输出偏置YB,手动时YB=0,自动时YB可由面板设定,AV=IN+YB。当手操器自动时,即使YB≠0,PID只要不在跟踪状态,其调节作用仍可使系统达到平衡,但若PID在跟踪时,对YB的赋值则会产生问题。鸿山电厂BTU热值校正逻辑简图及PID某跟踪时趋势如图8、图9所示。
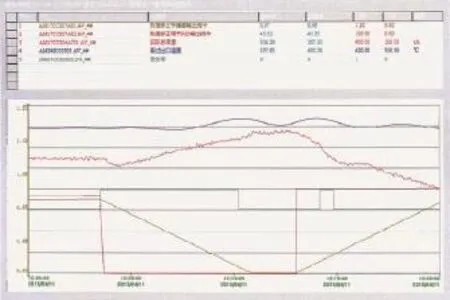
图9 热值校正PID某跟踪曲线
从历史曲线分析,12:03:30时,变负荷信号为真,手操器输出指令从45.6%快速下降,12:03:39时下降到0%,下降速率约为5%/s,导致实际总煤量增加,影响机组正常运行重要参数的稳定。
分析BTU逻辑,并调取操作记录比对,当热值修正工作在自动方式时,上层操作面板设置YB=-2,手操器输出指令AV=IN-2,手操器IN项的值根据设计煤量与校正煤量进行积分控制运算。当变负荷信号为真时,PID跟踪手操器的输出,而手操器输出指令仍减去2%后,再赋值给PID的跟踪量点TP,其中一周期计算、一周期赋值,手操器输出指令最终以每两周期减去2%的速率开始下降,由于运算周期为200ms,下降速率即为5%/s。
鉴于上述问题,根据操作习惯,一般在调节回路投入自动后,往往是通过改变设定值或设定值偏置来调整工况,而很少用到直接改变输出偏置的情况,且即使设置了输出偏置,自动调节作用也会将阀位平衡到原来的位置,这一功能反而造成了误操作的可能,建议屏蔽或取消。
3 结语
通过对MACS VI系统闭环控制器在实际应用中发现的问题进行分析与解决,表明既要求组态人员对功能块的运算原理充分掌握,并通过大量的仿真及实践调试,同时也暴露了一些国产DCS在功能块开发上与现场实际存在的不足,希望本文对其它工程应用与国产DCS的完善发展提供借鉴。
[1] 王常力, 罗安. 分布式控制系统(DCS)设计与应用实例[M]. 北京: 电子工业出版社, 2004, 8.
[2] HOLLiAS MACS V6. 5. 2软件使用手册 - 功能块说明[Z]. 杭州和利时自动化有限公司. 2013, 11.
[3] HOLLiAS MACS V6. 5. 2快速入门手册[Z]. 杭州和利时自动化有限公司. 2013, 11.
[4] HOLLiAS MACS V6. 5. 2系统维护手册[Z]. 杭州和利时自动化有限公司. 2013, 11.
[5] HOLLiAS MACS V6. 5. 2软件使用手册 - 用户操作(火电版)[Z]. 杭州和利时自动化有限公司. 2013, 11.
[6] HOLLiAS MACS V6. 5. 2软件使用手册 - 用户组态[Z].杭州和利时自动化有限公司. 2013, 11.
Discussion on Application Tips of Closed-loop Controller of HOLLiAS-MACS V6.5.2 Control System in Engineering Applications
By introducing several typical application problems of the closed loop controller of HollySys HOLLiAS-MACS V6.5.2 distributed control system (DCS), this paper analyzes the operation principle of the analog hand HSVMAN, PID controller HSVPID, integrator HSINTG, and expounds the typical application notice of algorithm module and the related solution. It provides the reference for other engineering application and the improvement of the domestic DCS development.
HOLLiAS; DCS; Hsalgman; PID; HSTING; Skills
B
1003-0492(2015)12-0088-04
TP273
胡昌盛(1989-),男,甘肃平凉人,大专,技术员,现就职于神华福能发电有限责任公司,从事火力发电厂热工自动化基建、调试、维护工作。
