FSEC悬架运动学优化及摇臂设计
2015-03-13宋大朝缪聪雄周文峰姜武华
宋大朝,缪聪雄,周文峰,姜武华
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
0 引 言
中国大学生纯电动方程式汽车大赛(Formula Student Electric China,简称FSEC)是一项由高等院校的汽车工程或汽车相关专业的在校学生组队参加的汽车设计与制造比赛。这项比赛起源于中国大学生方程式汽车大赛,至今已举办过 2届。大学生方程式赛车在国际上被视为“学界的F1方程式赛车”。该赛事是一项整车设计制造方面的比赛,也是一场“工程教育式的体验”。
悬架作为汽车上连接车轮与车身的弹性连接系统,主要由弹簧、减震器、导向机构和缓冲块组成[1]。悬架设计的好坏,直接影响整车的操纵稳定性和行驶平顺性,对于FSEC赛车而言,悬架设计更需要考虑整车的操纵稳定性。汽车悬架有着非常复杂的几何运动学和弹性运动学特性,由于FSEC赛车都通过铰链来连接杆件,没有衬套作为连接体,它的悬架几何运动学特性就显得更加重要[2]。文中对某高校一款FSEC赛车双横臂后悬架进行了详细的几何运动学分析,并对悬架的前束、外倾角、轮心纵向和侧向位移变化率进行了优化。在此基础上,对悬架摇臂设计进行了分析,以悬架摇臂各杆件的长度为参数,得到相应的杠杆比变化曲线,确定其对赛车的杠杆比、偏频的影响,验证了采用可调式摇臂改变杠杆比,对悬架刚度进行调节的可行性。
1 模型建立
以某高校车队中推杆形式的双横臂悬架数据为基础,建立悬架、推杆、摇臂以及避震器模型。硬点坐标参数见表1。
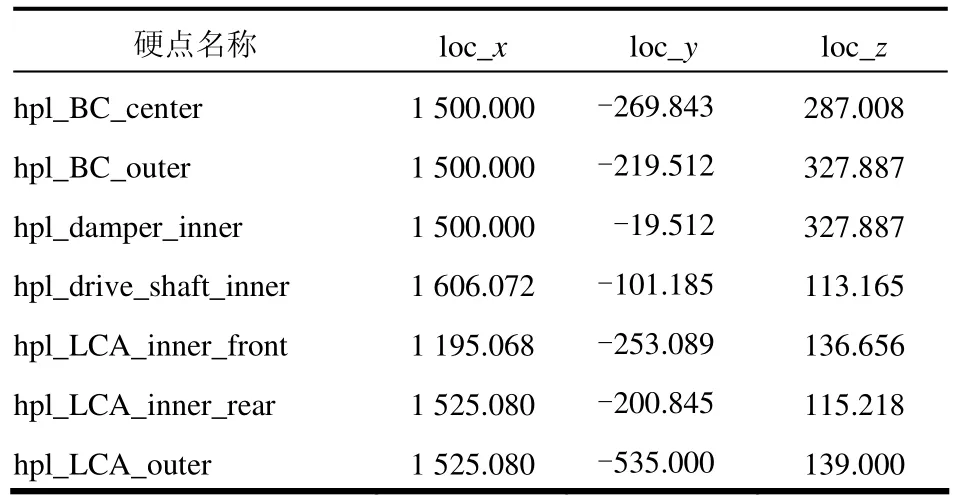
表1 双横臂后悬架硬点坐标mm

续表1
根据硬点信息和结构尺寸参数,建立悬架模型[3]。其中悬架杆件都通过约束副连接,整个悬架都以刚体形式建模,忽略杆件柔性对悬架运动学特性的影响,也不考虑实车铰链的间隙、刚度、阻尼等的影响,所建立的悬架系统如图1所示。
2 悬架几何运动学仿真
悬架运动学分析及优化包括几何运动学和弹性运动学 2个方面,主要通过悬架的 K&C(Kinematica&Compliance)特性进行定量分析[4]。悬架K&C特性决定车轮跳动时的姿态、位置和车辆行驶性能。K&C特性通常分为2个方面:
1)悬架几何运动学特性:车轮发生垂直位移时悬架几何学位置引起的其他 5个自由度定位变化,简称K特性,主要与悬架杆件运动的几何参数有关;
2)悬架弹性运动学特性:车轮受力时衬套挠曲变形以及导向杆件弯曲引起的车轮 6自由度定位变化,也称顺从特性,简称C特性,主要与悬架弹性元件的刚度特性有关。
因该悬架不存在橡胶衬套之类的弹性元件,且不考虑悬架杆件在受力时发生的弹性变形,所以在 Adams/Car中只对悬架的几何运动学特性进行分析和优化[5]。在四轮定位参数中,前束和外倾角随轮跳的变化率对整车的操纵稳定性影响很大,应尽量减小车轮上下跳动时这 2个参数的变化,保证整车的操纵稳定性;其次,轮跳时轴距和轮距的变化也会影响整车的操纵稳定性[6]。
在 Adams/Car中,设置双轮同向跳动,范围为-30~+30 mm,前束初始设置为0,外倾角设置为-1°。查看前束、外倾角、轮心纵向和侧向位移随轮跳的变化率。
2.1 前束的变化
前束角变化过大会影响赛车直线行驶的稳定性并使轮胎磨损加剧,所以在FSEC赛车设计时希望前束角的变化量越小越好。前束随轮胎垂向跳动的变化率如图2所示。
2.2 外倾角的变化
车轮跳动时外倾角的变化对赛车的稳态响应特性有很大影响。为了最大限度地发挥轮胎性能,使赛车在转弯中能够获得最大侧向力,设计时常把外倾角设为负值,并且希望其随车轮跳动的变化尽可能小[7]。外倾角随轮胎垂向跳动变化率如图3所示。
2.3 轮心纵向位移的变化
车轮跳动时,轮心纵向位移即赛车轴距也会随之改变,变化情况如图4所示。
2.4 轮心侧向位移的变化
车轮跳动时,轮心侧向位移即赛车轮距也会随之改变,变化情况如图5所示。
3 几何运动学优化
对于设计初期的悬架,在运动学仿真时,会存在某些参数变化过大的情况,对此,需运用Adams/Insight或手动调试来优化参数[8]。在上述仿真中,分别查看了前束、外倾角、轮心纵向和侧向位移随轮胎垂向跳动的变化率,据此将优化变量设置为悬架上下横臂内侧与车架连接点的硬点坐标,即:hpl_UCA_inner_front、hpl_UCA_inner_rear、hpl_LCA_inner_front、hpl_LCA_inner_rear这4个硬点的X、Y、Z三向坐标,共12个变量,设置在±5mm范围内变化,以各输出曲线的绝对最大值为目标函数,分析硬点对这些参数的灵敏度。通过Adams/Insight分析后,各硬点参数对输出曲线的绝对最大值影响最大的前 5个参数如图6所示(以前束灵敏度分析为例)。
对12个变量进行灵敏度分析后,发现这些变量对前束和轮心纵向位移的影响较大,对外倾角和轮心侧向位移的影响较小,其中,hpl_LCA_inner_rear_z增加可对上述目标函数进行改善,特别是对前束的改善非常明显;hpl_UCA_inner_rear_z增加可对外倾角、轮心侧向和纵向位移进行优化,对前束变化起了反作用,但影响不大;hpl_UCA_inner_front_z增加仅对轮心纵向位移影响较大;hpl_LCA_ inner_front_z减小可改善前束和轮心纵向位移,但对外倾角和轮心侧向位移的影响较小。综合考虑上述条件和整车布置,对3个硬点坐标的Z向进行调整,见表2。

表2 优化坐标值mm
其中 hpl_LCA_inner_rear_z的增加改善了全部目标函数,hpl_UCA_inner_rear_z的增加改善了外倾角、轮心侧向和纵向位移,但造成了轮心纵向位移调整过度,所以对 hpl_UCA_inner_front_z进行反向调整,抵消前 2个变量调整造成的轮心纵向位移调整过度的情况。优化前后对比如图7~图10所示。
4 悬架摇臂分析
首先以不可调摇臂为例,在软件中设置轮胎以满载时轮胎接地为基准,上下跳动值分别为 30 mm,测量弹簧压缩值,并将轮胎上跳值与弹簧压缩值的比值作为不可调摇臂的杠杆比曲线输出。摇臂模型如图11所示。
在图11中,摇臂三角形的A点为摇臂与推杆连接点,B点为摇臂与车架连接点,C点为摇臂与避震器连接点。AB长40 mm,BC长65 mm,AC长 70 mm,3点在 Adams/Car中的坐标值为:A(1500.0,289.286,321.965),B(1500.0,269.843,287.008),C(1500.0,219.512,327.887)。
通过仿真,可以得出初始摇臂的杠杆比曲线如图12所示。
接着对摇臂参数进行修改,将AB加长5 mm至45 mm,在仿真模型中,点B、点C坐标不动,对点A坐标进行修改,修改后的摇臂杠杆比曲线如图13所示。
从图13可以看出,加长后的杠杆比明显增大,继续对AB加长5 mm至50 mm,在仿真模型中,点B、点C坐标不动,对点A坐标进行修改,修改后的摇臂杠杆比曲线如图14所示。
在相同的悬架模型基础上,通过对 3组摇臂三角形的结构设计进行比较,可以看到,只对摇臂三角形的参数进行细微改变,就可使杠杆比在较大的范围内发生改变,如图15所示,AB边在初始长度时杠杆比范围为1.78~2.05,加长5 mm后的杠杆比范围为2.08~2.34,加长10 mm后的杠杆比范围为2.43~2.68。这在实际运用中是非常不错的变化范围,具有很强的现实意义。
5 结 论
在基于 Adams/Car的 FSEC悬架运动学分析及优化和悬架摇臂设计的仿真分析中,通过对悬架硬点进行调整,改善轮胎垂向跳动时前束、外倾角、轮心纵向与侧向位移的变化率;并通过调整悬架摇臂的尺寸参数,对FSEC悬架的杠杆比变化范围进行分析,验证了通过调整摇臂尺寸来改变悬架杠杆比的可行性,对FSEC悬架摇臂设计起到了预判和指导作用,具有较大的实用价值。
[1]米奇克,瓦伦托维兹. 汽车动力学[M]. 陈荫三,余强,译. 北京:清华大学出版社,2009.
[2]迪克逊. 减振器手册[M]. 李惠彬,孙振莲,金婷,译. 北京:机械工业出版社,2011.
[3]范成建,熊光明,周明飞.虚拟样机软件MSC.Adams应用与提高[M]. 北京:机械工业出版社,2006.
[4]Milliken W F.Race Car Vehicle Dynamics [M].United States of America:Society of Automotive Engineers,1995:61l-620.
[5]刘虹,王其东.基于 Adams双横臂独立悬架的运动仿真分析[J].合肥工业大学学报,2007,30(1):57-59.
[6]刘美燕.FSAE赛车悬架仿真分析及操纵稳定性虚拟试验[D].长沙:湖南大学,2008:39-47.
[7]贝尔恩德·海森英,汉斯·于尔根·布兰德耳. 汽车行驶动力学性能的主观评价[M]. 石晓明,陈祯福,译. 北京:人民交通出版社,2010:45-86.
[8]倪俊,徐彬. FSAE赛车双横臂前悬架运动学仿真及优化[J]. 车辆与动力技术,2011(4):51-54.
