基于PLC和模糊控制的卸料车自动布料系统设计
2015-03-09高遵波徐庚举
高遵波 徐庚举 王 兵
(烟台金建冶金科技有限公司)
基于PLC和模糊控制的卸料车自动布料系统设计
高遵波 徐庚举 王 兵
(烟台金建冶金科技有限公司)
为了更好地实现矿仓自动均匀布料,对只根据矿仓料位值高低优先级的布料方案进行了改进,考虑了料位变化快慢对布料点的影响,并采用模糊推理控制方法智能判断最佳布料点。设计的模糊控制器选取料位设定值与检测值的偏差E和偏差变化率EC作为输入变量,矿仓矿料需求量U作为输出变量,最终在MATLAB中形成模糊控制查询表,然后按照需求量U值最大先布料的原则确定下一时刻布料点。同时在PLC Step7软件中编程,控制卸料车运行至准确布料点下料,按照采样周期循环判断执行,实现矿仓的均匀布料。结果表明,系统切实可行,布料过程更加合理和智能。
卸料车 自动布料系统 模糊控制 PLC MATLAB
矿山矿仓布料现场环境恶劣、粉尘大、操作工人劳动强度大,常用的自动布料系统方案是根据各矿仓料位的高低优先等级(即料位最低的优先布料)来实现。这种控制方法有时会有缺陷,只是通过这一时刻的料位来判断卸料车下一时刻的布料点,而没有考虑到料位变化的快慢对布料点的影响(仓下放矿速度的快慢)[1],这样很可能会出现以下情况:当前时刻该矿仓的料位值比较低,但是料位变化的速度很慢,即很长时间内料位不会有很大变化,而相反,另一矿仓的料位值较高,但是料位的变化速度很快,若根据料位低优先的原则,卸料车会为前者布料,这样可能会使料位值高、料位变化速度快的后者出现料位过低或者空仓的现象。因此,为了解决上述问题,本文采用了模糊控制算法智能优化判断卸料车下一时刻的最优布料点,通过对卸料车全自动智能控制,使矿仓实时均匀布料,对实现矿仓无人值守、改善操作人员工作环境以及提高企业的生产效率具有重要意义。
1 自动布料系统优化方案
自动布料系统采用雷达料位计实时检测矿仓料位,采用刻度标尺定位系统对卸料车位置实时连续监测,并将信号输入至PLC,结合模糊控制算法智能判断卸料车下一时刻的最优卸料位置,最终通过PLC输出控制卸料车,实现矿仓的实时均匀布料。为提高PLC的编程和调试效率,模糊控制器采用离线计算的方式形成查询表,通过PLC在线查表方式达到控制目的。本文选取10 m高的圆筒矿仓为研究对象,卸料车自动布料系统原理见图1。
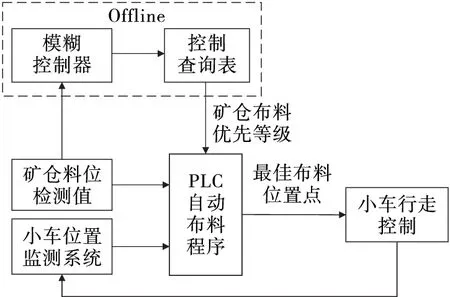
图1 自动布料系统原理
2 模糊控制器的设计
2.1 模糊控制器结构
模糊控制器的结构见图2。选取矿仓料位设定值与检测值的偏差E和该偏差变化率EC作为模糊控制器的输入变量,矿仓矿料需求量U为输出变量;采样间隔T设置为5 min;ke、kec为量化因子,用于将物理误差e和物理变化率ec从物理连续值转换为模糊控制器输入变量E和EC;ku为比例因子,用于将模糊控制器的输出量U转换为实际的输出值u。
e(k)=r(k)-y(k) ,
(1)
ec(k)=[e(k)-e(k-1)]/T,
(2)
式中,r为料位高度设定值;y为料位高度实际检测值;e(k)、ec(k)为kT时刻的误差和误差变化率。
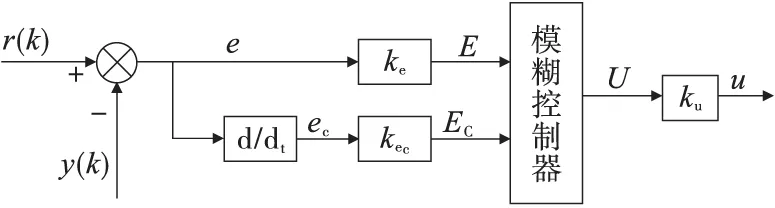
图2 模糊控制器结构
2.2 模糊论域
为了提高实时性,模糊控制器常常以控制查询表的形式出现。为了能方便产生控制查询表,在模糊控制器的设计中,通常就把语言变量的论域定义为有限整数的离散论域[2-3]。根据实际情况设定料仓高度目标值为9 m,则矿仓料位高度差e的物理论域为[0 m,8 m],将其转换为整数论域,即E=[0,1,2,3,4,5,6,7,8,9,10,11,12],取转换量化因子ke=1.5,则E=<1.5e>;偏差变化率ec的物理论域为[-1 m/min,1 m/min],将其转换为整数论域,即EC=[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],取转换量化因子kec=6,则EC=<6ec>;控制器输出量u的物理论域为[0 m,8 m],将其转换为整数论域,U=[0,1,2,3,4,5,6,7,8,9,10,11,12],取比例因子ku=2/3,则u=2U/3。其中,<>为取整运算。
2.3 语言变量值和隶属度函数
选择语言值个数的多少直接关系到确定模糊规则的复杂程度。当语言变量值个数较多时,能使控制规则比较细致,但是制定起来会比较复杂。本文对语言变量E和输出量U选用7个模糊等级:{Z(零)、SS(小小)、MS(中小)、S(小)、M(中)、MB(中大)、B(大)},EC也选用7个模糊等级:{NB(负大)、NM(负中)、NS(负小)、O(零)、PS(正小)、PM(正中)、PB(正大)},利用MATLAB中的FIS Editor控件建立隶属度函数,选用三角形形式,曲线见图3。

图3 隶属度函数曲线
2.4 模糊控制规则
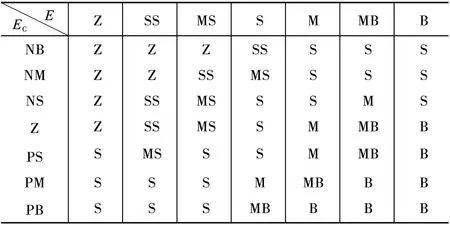
模糊控制规则库是在操作者经验和控制器的设计者在对被控过程进行深入了解的基础上建立的[1]。规格库是由若干条控制规则组成,按照IF…THEN…的形式表达,将若干语言规则建立成控制规则表,见表1。
表1 模糊控制规则
2.5 查询表输出
在MATLAB Fuzzy工具箱FIS Editor中,推理(Implication)的方法为min,合成(Aggregation)的方法为max,去模糊化(Defuzzification)的方法为mom,将FIS Editor中的模糊规则导出WorkSpace。在MATLAB中的Simulink平台选择模糊控制器模块,设计好模糊控制器的输入、输出模糊变量和模糊控制规则,运行输出至WorkSpace,最后导出矩阵查询表,见表2。
表2 模糊控制查询

通过模糊控制查询表得到每个矿仓的矿物需求量后,按照需求量优先级高先布料的原则(查询表中输出量U越大,优先级越高)确定下一时刻卸料车的布料点,若存在多个料仓优先级相同,则优先布料离当前位置最近的矿仓,PLC读取该位置信息,通过控制卸料车电机正反转,使卸料车准确运行至布料点下料,如此过程按照采样周期循环判断执行,实现矿仓的均匀布料。
3 PLC设计实现
3.1 硬件配置
自动布料系统PLC硬件配置包括电源(PS307 5A)、CPU模块(CPU315-2PN/DP)、模拟量输入模块(2个AI8×12bit)、数字量输入模块(1个DI32×DC24V)、数字量输出模块(1个DO16×DC24V/0.5A),所有模块均需经隔离器进行信号隔离。在Step7硬件中组态,并调试AI模块量程卡为4~20 mA。
3.2 软件设计
利用PLC编程实现的程序流程见图4。在Step7软件中采用STL语言进行编程,主要编写的程序块:主程序OB1,采样程序FC1(包括各矿仓料位值和卸料车当前位置值),将误差E和变化率EC进行量化、输出量U进行比例清晰化的程序块FB2(背景数据块DB2)和程序FC2,控制查询表程序块FB3(背景数据块DB3)和程序FC3,卸料车运动控制程序FC4[4]。其中,FB2和FB3是关键部分。除此之外,还需设置料位上下限值,当到达上限位但采样间隔未到,需强制卸料车行走至下一布料点或进行应急处理程序。
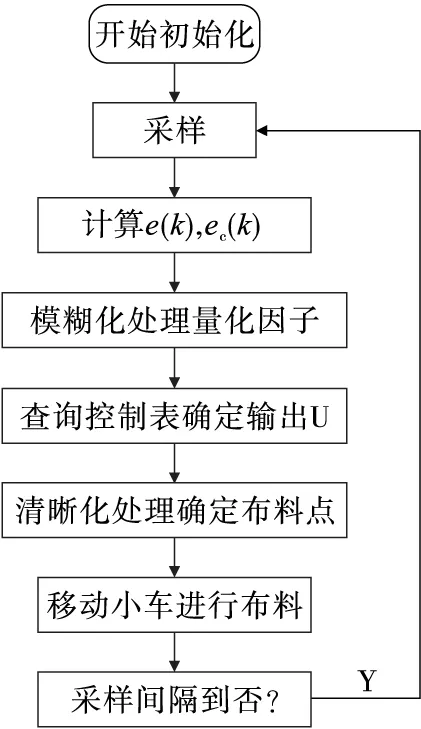
图4 PLC程序实现流程示意
3.3 量化和清晰化程序块设计
根据E=<1.5e>,EC=<6ec>,u=2U/3,FB2程序设计如下:
L #ek //误差e(k)
L #ek1 //e(k-1),初始值为0
-R
T #ec0
NOP 0
L #ec0 // ec0为e(k)-e(k-1)
L #t // t为采样周期
/R
T #eck //计算误差变化率ec(k)
NOP 0
L #ek
T #ek1 //将e(k)传给e(k-1)
NOP 0
L #ek
L 1.5 //误差e乘量化因子
*R
T #Ek0
RND //取整,转换成整数论域E
T #Ek
3.4 控制表查询程序块设计
采用判断条件查询式方法,根据E和EC的值得出控制值U,举例当E=4,EC=3时,U=8的查询程序如下:
A(
L #Ek
L L#4
==D //判断E是否为4
)
A(
L #ECk
L L#3
==D //判断EC是否为3
)
JNB _002
L 8
T #Uk //输出控制值U
_002: NOP 0
4 结 语
本文重点对自动布料系统中布料点位置的确定方法进行了改进,结合各矿仓当前料位高低值和料位值变化速率2个因素,运用模糊推理控制方法,确定各矿仓矿料需求量优先级(即下一时刻卸料车最佳布料点),通过PLC编程实现模糊控制过程,并根据卸料车位置信号控制运行方向,实现自动布料。这一改进方法使得布料过程更加合理,各矿仓料位更加稳定和均匀,系统易于编程,对实现矿仓无人值守以及提高企业的生产效率具有重要意义。
[1] 于仲安,张 姿.模糊控制在选矿布料系统中的应用[J].矿山机械,2012,40(4):107-111.
[2] 孙增圻.智能控制理论与技术[M].北京:清华大学出版社,2003.
[3] 薛定宇,陈阳泉.控制系统计算机辅助设计—MATLAB语言及应用[M].北京:清华大学出版社,1996.
[4] 卢 燕,罗青华,魏克新.PLC实现的模糊PID控制器及在高炉布料系统中的应用[J].天津理工大学学报,2008,24(2):73-75.
2015-03-09)
高遵波(1975—),男,工程师,264003 山东省烟台市高新区学府西路18号。
