基于DSP三相交流电动机矢量控制的软件设计
2015-02-25底群
底群
(西安职业技术学院机电工程系,陕西西安 710032)
基于DSP三相交流电动机矢量控制的软件设计
底群
(西安职业技术学院机电工程系,陕西西安710032)
摘要:介绍了全数字式三相交流电动机矢量控制的软件设计。在软件设计中完成了主程序和PWM时基、A/D转换及故障中断子程序的设计,在PWM时基中断子程序设计中重点叙述了PWM矢量控制实现的具体方法。电机启动时采用SVPWM开环控制运行,系统进入闭环后采样电机定子电流,进行Clarke变换和Park变换。结果表明,三相交流电动机启动快,调速范围宽,精度高。
关键词:数字信号处理器;三相交流电动机;矢量控制
现代电力电子技术以及计算机控制技术的迅速发展,推动了电气传动技术的革新。近几年,单片机数字控制技术逐渐取代模拟控制技术,使交流电机变频调速以其效率高、功率因数大及调速优和启动性能好等优点,成为国内外公认的最有发展前途的调速方式之一[1]。
1 矢量控制的程序设计
软件由主程序、中断服务子程序组成。主程序实现芯片的初始化、各个子模块的初始化等功能。中断服务子程序包括A/D转换、PWM(脉冲宽度调制)时基、故障和错误陷阱中断等。
在程序设计中,对需要用到的一些参数作如下说明:软件设定一个载波频率为10~20kHz,这个频率段正弦逼近程度是最好的,而且在IPM开关频率之内。该控制器的MCPWM模块有3对PWM口,其中H为高端接IGBT(绝缘栅双极晶体管)的上桥臂,L为低端接IGBT的下桥臂,采用中心对齐模式发出PWM控制信号,该系统将在每一个周期里产生2个线-线脉冲,有效开关频率加倍,纹波电流减小,但并没有增加功率器件的开关损耗。通过死区寄存器DTCON1把死区时间定为2μs。Fcy(指令时钟) = Fosc(晶振频率) /4,使用XT振荡器4倍频PLL(锁相环),所以4倍频PLL后,Fcy= Fosc,这样可以提高分辨率[2]。
1.1主程序设计
主程序的作用是完成W寄存器、堆栈、QEI及各变量的初始化。其框图如图1所示。

图1 矢量控制主程框图
1.2矢量控制的PWM时基中断子程序设计
PWM时基中断子程序框图如图2所示。

图2 PWM时基中断子程序框图
PWM矢量控制的具体实现办法:
1)每N (本文取24,可调节)个PWM周期计算一个电机速度。
2)启动方式采用SVPWM开环控制,运行M(本文取0~10 000,可调节。10 000个PWM周期=1s)个PWM周期(从启动起就开始检测电流值,每个PWM周期进行A/D转换,采样A,B相电流值),进行Clarke变换和Park变换,计算转子磁链位置。
3)系统进入闭环后采样电流信号,进行Clarke变换和Park变换。进入闭环第一个PWM周期直接调节电机速度,以后每N个PWM周期调节一次电机速度,把启动的最后一个Uα(定子静止两相α电压分量)和Uβ(定子静止两相β电压分量)用Park变换成电流调节前一次的累积值,启动的最后一个T轴电流值作为速度PI前一次的累计值,每个PWM周期都计算转子角位置和调节电流,电流调节出来的以定子电流角频率ωS速度旋转的两相旋转坐标MT坐标系的M和T参考电压利用Park变换转换成Uα和Uβ。
电机启动时采用SVPWM开环控制。本文选用7段式电压空间矢量PWM波形。由3段零矢量和4段相邻的两个非零矢量组成,3段零矢量分别在PWM波的开头、中间和结尾,如图3所示。其中每个扇区Ux,Ux±60的选择顺序为第0扇区: Ux= U0,Ux±60= U60;在第1扇区: Ux= U120,Ux±60= U60;在第2扇区: Ux= U120,Ux±60= U180;在第3扇区: Ux= U240,Ux±60= U180;在第4扇区: Ux= U240,Ux±60= U300;在第5扇区: Ux= U0,Ux±60= U300。
利用平行四边形法则,不同的矢量组合可以合成新矢量。设相邻两个为U1和U2,零矢量为U0,合成新矢量为Uout,矢量作用时间分别是t1,t2,t0。TPWM是PWM脉冲周期。根据Uout,Ux和Ux±60投影到平面直角坐标系Oαβ中的公式:

图3 七段式SVPWM的PWM波形

推导得到计算公式:

在每个PWM周期中计算出下一个PWM周期的占空比寄存器的值,还要计算磁链位置,以免进入闭环后产生磁链误差,影响Park变换和逆变换的准确性。启动子程序框图如图4所示。

图4 启动运行子程序框图
闭环子程序用来完成矢量双闭环控制。矢量双闭环控制系统方案如图5所示。

图5 矢量双闭环控制系统方案
闭环子程序框图如图6所示,具体思路如下:

图6 闭环运行子程序框图
1)经过霍尔电流传感器测得逆变器输出的定子电流iA,iB,通过DSP(数字信号处理器)的A/D转换器转换成为数字量,利用式iC=-(iA+ iB)计算出iC。电流iA,iB,iC经过Clarke变换和Park变换成旋转坐标系中的直流分量iM,iT,这两个分量成为电流环的负反馈量。
2)电动机的机械转角位移利用4倍频的1 024线增量式编码器测量得出,并且将它转换为转速n 的PU值。转速n成为速度环的负反馈量。
3)异步电动机的转子磁链转速和转子机械转速是异步的,因此采用电流-磁链位置转换模块得出转子磁链位置,当电动机的转速n和定子电流M,T坐标系的分量iM,iT已知时,就可以求出转子磁链位置θ,来参与计算Park变换和逆变。
4)速度PI调节器给定转速nref与转速反馈量n的偏差,输出用于转矩控制的电流T轴参考分量iTref。电流PI调节器调整电流反馈量iT,iM与iTref和iMref,采用恒定磁场,设其值为0的偏差,分别输出M,T旋转坐标系的相电压UMref和UTref。UMref和 UTref再经过Park逆变换转换成为在α,β直角坐标系的定子相电压矢量的分量Uαref和Uβref。
5)当定子相电压矢量的分量Uαref,Uβref和它所在扇区数已知时,使用7段式电压空间矢量SVPWM技术,产生PWM控制信号来控制逆变器[3]。
1.3 A/D转换完成中断子程序设计
A/D转换完成中断子程序框图如图7所示。本文采用的DSP芯片拥有10位A/D转换模块,用来采样电流反馈值。A/D转换模块采用两路同时采样;参考电压为芯片内部0~5V; PWM特殊事件触发时保证A/D和PWM同周期;转换时钟周期设置为1个Tcy。
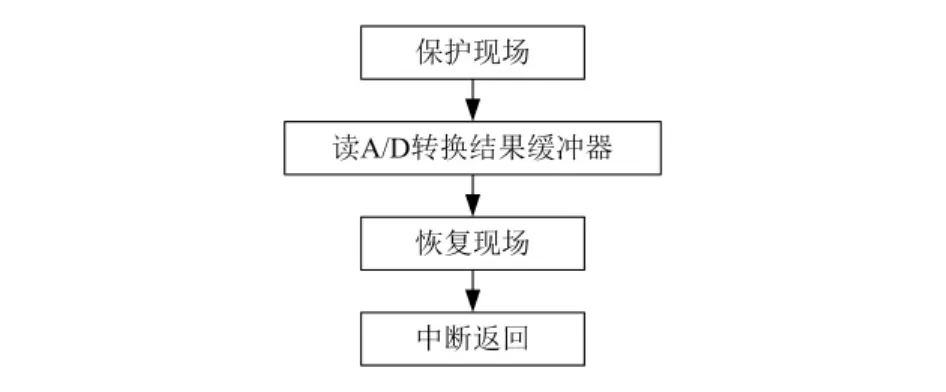
图7 A/D转换完成中断子程序框图
具体方法:把两只霍尔电流传感器的输出端连接到电压转化板,使其输出的电压值能被调整到芯片参考电压范围之内,然后把对应的电压转换板的两个输出端连接到A/D转换引脚。到采样时刻时从缓冲寄存器中读取电流采样值,完成A,B相的电流采样[4]。
1.4故障处理中断子程序设计
故障处理中断子程序框图如图8所示。故障处理是控制系统的重要组成部分。对于任何系统来说,都不可能一直稳定运行,在未知的某一时刻就会有想象不到的故障产生。如果故障未被处理后果可能不堪设想,所以故障检测必须时时进行。本文的故障主要是由IPM的过热、过压、过流、直通产生[5]。

图8 故障处理中断子程序框图
处理方法:驱动电源的IPM故障信号引脚接到开发板的FAULT引脚,当遇到故障的时候,IPM低电平输出10mA、宽度为1.8ms的脉冲信号。信号一产生立即停止PWM时基,使系统停止工作,同时点亮一盏LED小灯作为提示。否则循环输出故障信号容易损坏驱动电源模块。
2 系统测试
系统进入闭环后,获取采样电流,测量反馈转速,计算转角的位置,通过速度、电流的PI调节,利用SVPWM技术完成矢量的双闭环控制。当电机的实际速度值达到设定的速度值时,电机保持平稳运行,然后在数据空间记录编码器反馈的速度值,直到手动停止程序为止。
图9是矢量双闭环控制的电机速度波形,它是芯片记录的2 500个由编码器采集到的速度值。电机的速度在25个PWM周期(2.5ms)调节一次,启动运行时间大约为0.6s(可根据要求调整)。试验结果表明:电机速度上升时间大约在0.3s,峰值时间在0.8s左右,且超调量非常小,大约为0.1%,几乎无震荡;调整时间为0.84s左右;电机定子电流变化也较小,并且稳定后其波形接近正弦波形,矢量控制电机运行非常稳定[6]。需要说明的是,因编码器干扰等原因,电机的速度值存在2%以下的误差(电机转速为50~1 400r/min)。
从试验结果可以看出,本控制系统速度响应快,运行平稳,稳定时速度误差小,说明系统运行良好。

图9 矢量控制的电机速度波形图
3 结束语
本系统利用DSP实现三相交流电动机矢量控制。软件由主程序、中断服务子程序组成。在闭环系统中进行了实验测试,结果表明,电机启动快速,运行平稳,具有较宽的调速范围,精度较高,满足了对三相交流异步电动机的调速控制。采用矢量控制可以提升交流电机的调速性能,适用于静态性能要求高的应用系统,而且控制软件采用电流内环、速度外环的双闭环控制策略,模块化编程,便于日后的软件升级和修改。
参考文献:
[1]赵学举.基于DSP的SVPWM变频调速系统设计[J].电气应用,2012(8) :78-81.
[2]李瑾.基于DSP的异步电动机SVPWM控制技术的实现[J].矿山机械,2012(3) :100-105.
[3]张成,王心坚,李良璋,等.SVPWM的调制函数与谐波分析研究[J].贵州大学学报:自然科学版,2012(6) :63-67.
[4]张传金,王志业.基于DSP28335的三电平SVPWM算法研究[J].电力电子技术,2011(6) :67-69.
[5]杜志勇,王鲜芳.基于DSP的感应电动机SVPWM矢量控制调速系统[J].电力电子技术,2007(9) :56-60.
[6]马良河,杨洁浩,叶建强.交流电机变频调速性能试验系统的研究[J].电机与控制应用,2010(1) :75-77.
The software development of DSP three-phase AC motor based on vector control
DI Qun
(Department of Mechanical and Electrical Engineering,Xi'an Vocational and Technical College,Shaanxi Xi'an,710032,China)
Abstract:It introduces the software development of the full digital three phase AC motor vector control.The software system includes the main program,PWM time base,A/D conversion completion and fault interrupt subroutine.It shows the detail about PWM time base interrupt subroutine design.It uses SVPWM open-loop operation to start the motor,then conducts current sampling in the closed-loop process,and realizes the Clarke transformation and Park transformation.The results show that the three-phase AC motor starts faster in a wider range of rotational speed modulation with high precision as well.
Key words:DSP; three-phase AC motor; vector control
DOI:10.3969/j.issn.2095-509X.2015.06.008
作者简介:底群(1977—),男,陕西咸阳人,西安职业技术学院讲师,主要从事单片机应用的教学与研究工作。
收稿日期:2015-04-17
中图分类号:TM930.9
文献标志码:A
文章编号:2095-509X(2015) 06-0032-04
