基于无传感器矢量控制的PMSM在AGV中的应用
2015-02-24舒志兵周培张志远
舒志兵,周培,张志远
(南京工业大学自动化与电气工程学院,江苏南京 211816)
自动导引车 (Automated Guided Vehicle,AGV),科学解释是装配有激光或电磁等多种导引装置,能沿着特定的路径工作,且含有安全保护以及各种移载功能的运输小车。由于人力成本的提高,AGV在工业、物流业发展十分迅速。伴随着工业以及物流业发展的多样性,传统的AGV在一些较为恶劣的环境下使用会出现编码器故障等问题,文中所提出的无传感器矢量控制下自动导引车则是为了解决这个问题。
1 无传感器矢量控制的介绍
永磁同步电机 (PMSM)工作时,一般需要编码器发送信号,但是编码器的增加意味着电机的轴向增长,相对应的成本提高,同时也可能出现一些外界对反馈信号的干扰等问题。当PMSM工作于一些特殊环境例如低温、振动等时,其编码器容易出现问题,所以在这些环境下需要使用无传感器矢量控制小车,无传感器控制成为了解决这种情况的选择之一。从理论上而言,当得到伺服驱动器的输出电压和电流值时,可以通过实时计算得出电机的实时转速,从而在避免使用传感器的情况下能够使电机较为精确地工作。
2 系统结构描述
AGV作为一种无人操控的自动化运输设备,由于用途的广泛性和多样性,从而产生了多种不同的引导方式。引导方式中主要分成两种:(1)车外固定轨迹引导;(2)自由路径引导。文中所选用的引导方式为车外固定轨迹引导中的电磁引导方式。该种方式导线隐蔽、不易污损、经济耐用、可靠性高,是现如今最为成熟和在各种方面应用范围最广的引导方式。
图1简单地描述了AGV的基本结构。AGV的主动轮为小车的后轮,前轮为从动轮,这样的设计能使小车在加速的时候,重心后移,主动轮与地面的最大摩擦力更大,主动轮抓地的能力更强,防止后轮出现打滑的现象。同时,后轮采用无传感器矢量控制下的PMSM,用以保证AGV运行的精确性。AGV的驱动器选用了路斯特公司的CDF驱动器;AGV的电源包含48、24、5和12 V。AGV车上利用电力电子转换器将电源的48 V转换为5、12和24 V。24 V电源为车体控制器、运动控制器和传感器供电;其中运动控制器输出的5、12 V可提供编码器和地标传感器的电源以及伺服控制电源;48 V电源为总电源,为伺服电机、起重单元等提供电源。
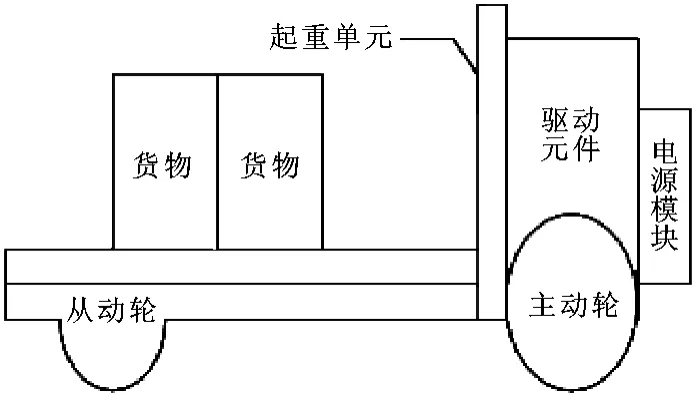
图1 AGV系统的结构
3 系统的运行方式
在该系统中,AGV沿着埋藏于地面下的电磁引导线运行。安装在小车车底的检测元件对小车运行轨迹进行修正,通过对小车的两个主动轮的速度调节实现对小车在工作过程中的位置误差的纠正、小车运行轨迹方向转变等功能。
图2中显示的便是AGV在转向时的运动示意图。图2中旋转半径为R;车身宽度为2W;传感器相对于前车轮的距离为H;在时间Δt里面传感器旋转的角度为θ;在时间Δt里面内前轮旋转的角度为θ1;在时间Δt里面外前轮旋转的角度为θ2;在时间Δt里面内前轮旋转的距离为L1;在时间Δt里面外前轮旋转的距离为L2。通过图2可知:
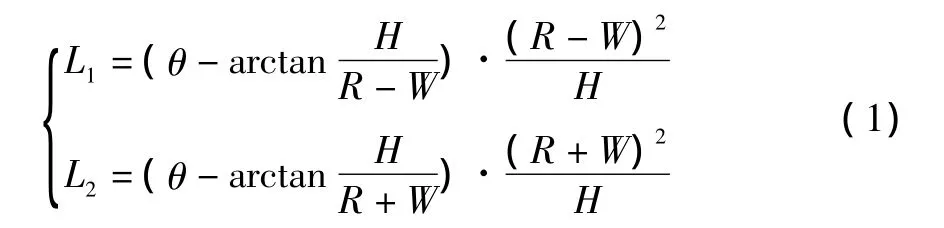
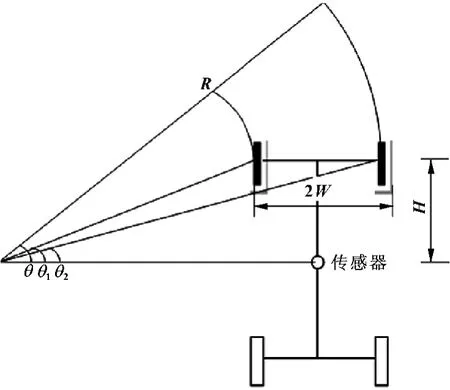
图2 AGV转向示意图
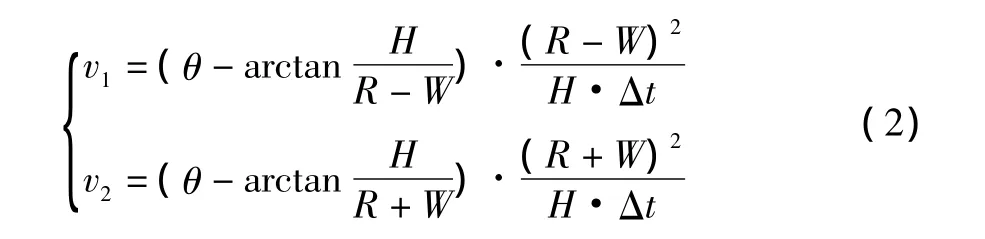
当时间Δt足够小,可以默认在Δt时间内两个轮子为匀速运动:
4 滑模观测器的运用
滑模控制的思想:根据系统当前的状态与预想状态的偏差,进行有目的的变化,从而使系统按照预定状态运动。
通过对电机建立静止坐标系αβ(忽略掉涡流和磁滞损耗),可以得到定子电压方程为:
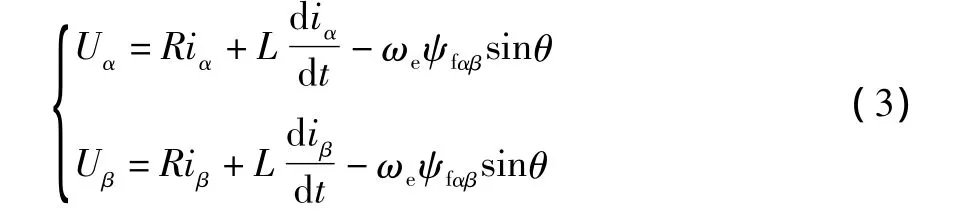
通过公式 (1)转变方程将定子电流当作状态变量,则可以得到方程:
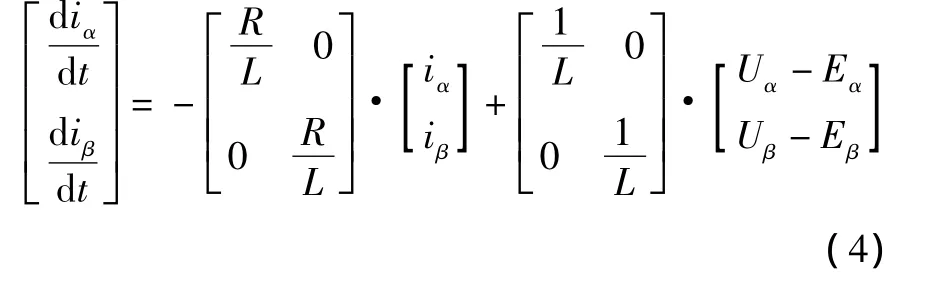
在常用的滑模观测器中使用的开关函数为sigmoid函数,但是由于在过渡阶段时存在不连续点,可能会导致系统出现抖动现象。为了使系统能够更加平稳地过渡,过渡阶段选取了sin函数,用以避免不连续点以及导数突变的现象出现。所以,此系统的滑模观测器为:
滑模观测器的电流方程为:

式中:is为电流估计值;为电流实际值;Rs与Ls分别为定子绕组的电阻和电感;Es为电机工作的反电动势;k则是滑模观测器增益 (常量)。令=is-,即为电流误差值。同时,反电动势Es转换到坐标系αβ中可以得到公式:

PMSM的转子位置通过反电动势得到,由于时间较短,所以认为ω不变。同时由于使用了滑模观测器函数,使得一些变量产生了高次的干扰波,所以选择了切比雪夫滤波器滤去干扰。同时由于低通滤波器导致反电动势的相位滞后,所以对角度θ补偿Δθ,得到实际角度θ*:

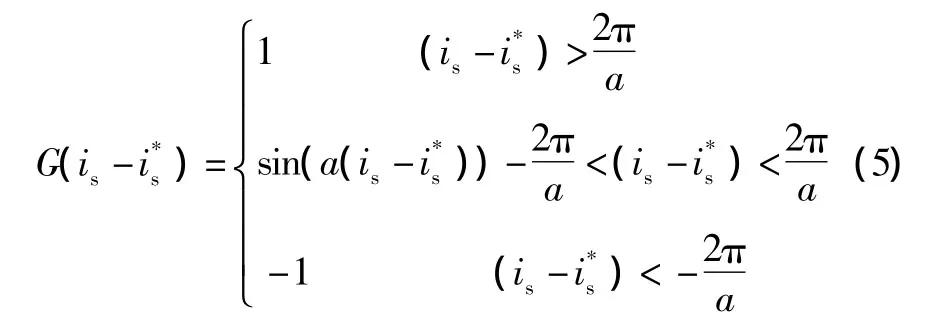
图3即为伺服驱动的无传感器工作图。
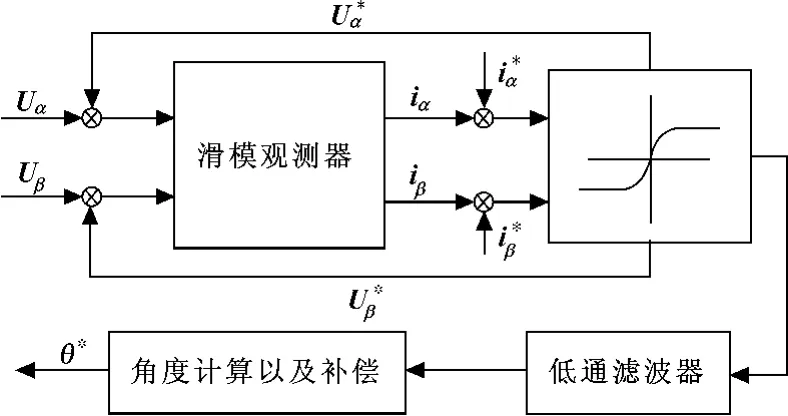
图3 滑模观测器的结构图
5 仿真结果
在不考虑低速抖动的理想情况下,通过仿真软件对提出的控制算法进行仿真,得到电机由初始速度0到1 600 r/min的速度波形和转矩输出波形,见图4—5。
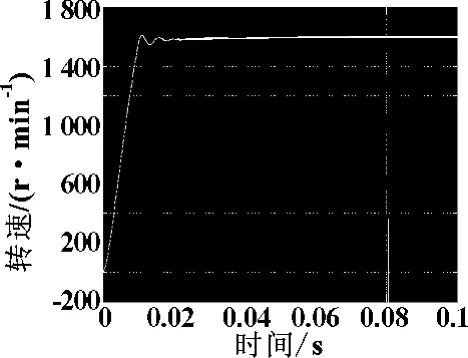
图4 电机启动的速度波形
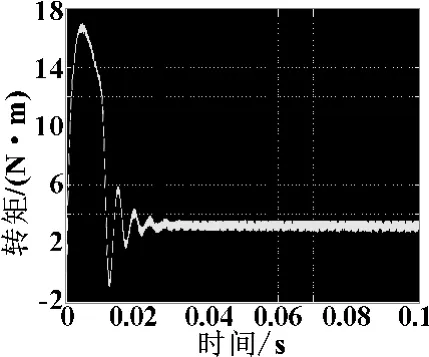
图5 电机的输出转矩波形
6 实验结果及总结
首先通过驱动器对电机施加一个电压,此时电机的内部虽然有电流,但是电机的速度为0,这是为了对电机进行自整定,转子并不会转动。然后当自整定结束后,由停止状态进行加速然后进行匀速运动,最后停止运行。可以通过示波器监测给定速度 (曲线1)、实际速度 (曲线2)和q轴电流 (曲线3)。
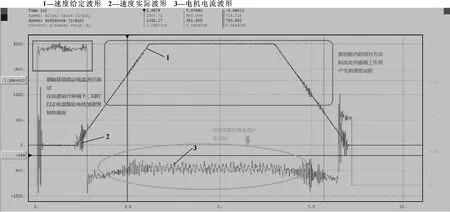
图6 AGV运行过程图
从图6中可以看出:在PMSM初始工作阶段,向PMSM输入一定电流,但是该阶段速度仍然保持为0;当PMSM开始转动时,初始阶段仍然是通过开环模式为PMSM加载较大电压使PMSM工作;当PMSM真正进入无传感器工作状态,电流则会迅速减小;由于PMSM上连接了较大的负载,导致电流会产生一定的波动;当电机减速到低速阶段,则在此进入开环模式。从图6中可以看出:虽然PMSM缺少了编码器,但是AGV仍然能够顺利地工作,可知该方案是可行的。
[1]薛树功,魏利胜,凌有铸.基于扩展卡尔曼滤波的永磁同步电机无传感器矢量控制[J].电机与控制应用,2011,38(8):15-18.
[2]张兴华.感应电机的无速度传感器逆解耦控制[J].电工技术学报,2005,20(9):55 -60.
[3]STEPHAN Jennifer,BODSON Marc,CHIASSON John.Real-time Estimation of the Parameters and Flux of Induction Motors[J].IEEE Trans on Industry Applications,1994,30(3):746-759.
[4]曹建荣,虞烈,魏泽国,等.基于逆系统理论的感应电机解耦控制的研究[J].电工技术学报,1999,11(4):7-11.
[5]刘爱民,郭庆鼎.采用滑模观测器的交流永磁直线伺服电机无传感器控制[J].沈阳工业大学学报,2004,26(2):164-167.
