电弧炉电极调节系统模糊自适应PID控制器设计
2015-02-20鲁军,李亮
鲁 军,李 亮
(沈阳理工大学 信息科学与工程学院,辽宁 沈阳 110159)
电弧炉电极调节系统模糊自适应PID控制器设计
鲁 军,李 亮
(沈阳理工大学 信息科学与工程学院,辽宁 沈阳 110159)
电弧炉炼钢系统是一个非线性、强耦合、多变量的系统,采用传统的PID控制很难取得理想的控制效果。基于恒阻抗控制策略,运用模糊数学的基本理论和方法设计模糊自适应PID控制器,该控制器可实时调整PID参数,使电极调节系统工作在最佳状态。仿真结果表明控制器能够有效地调节电极的升降,将电弧的弧长控制在期望值,可有效降低能耗,提高炼钢产品质量。
电弧炉;电极控制;三相耦合;恒阻抗;模糊自适应PID
近年来,电弧炉炼钢已经广泛应用于钢铁制造。电弧炉利用电极与炉料间产生的高温电弧来熔化金属和矿石,弧区温度一般可达到3000℃以上。电弧炉比其他炼钢炉工艺更适于优质合金钢的熔炼,因为它能有效地除去硫、磷等杂质,且炉温容易控制,灵活性强。在炼钢过程中,通常要求电弧炉干扰小、功率高、耗电少,此时需要通过控制三相电流的大小,使电弧炉主回路稳定运行。电弧炉电极调节系统的对象是弧长,但是不能通过合适的检测装置测得,因此只能通过改变电极的位置来调节弧长,从而控制电流的大小。尤其在熔化期,炉料在电弧的作用下激烈反应,并伴有金属飞溅和蒸发,很容易发生短路、断弧和炉料的坍塌,此时需要快速、准确、实时地调节电极的位置,使电弧炉工作在最佳状态。为此,国内学者已经做了一定的研究[1-3],并取得了不少理论成果。
采用恒电流控制策略,可以使炉内输入功率和电网电流保持平稳,控制器的灵敏度也很高,但是这种控制策略并不能消除三相电极间的耦合作用,当其中一相电流发生扰动时,其余两相电流也会受到影响,给电极调节器带来困难。本文借鉴前人的研究经验,采用恒阻抗控制策略,设计了模糊自适应PID控制器,该控制器弥补了常规PID控制的缺陷和不足,精确控制了电极的升降,并有效削弱了三相电极之间的耦合作用。
1 电弧炉电极调节系统
电弧炉电极调节系统主要由电流电压测量回路、互感器、控制器、液压传动系统组成。电弧电压经过测量回路转化为直流电压,然后与给定的电压值进行比较,差值送入控制器,输出电压u来控制比例阀的开度,从而控制液压传动系统的进油和出油速度,对电极的升降进行调节。
电极调节的控制策略可分为三种形式:恒功率控制、恒电流控制和恒阻抗控制。而在实际生产中,大部分采用恒电流和恒阻抗的控制策略。其中,恒阻抗控制可以有效减小三相电极之间的耦合和电流的波动,使电弧平稳燃烧,因此本文设计的电弧炉电极调节系统选择了恒阻抗的控制策略。
恒阻抗控制策略的实质是通过调节弧长,保持电弧阻抗为一恒定值,使电弧电流趋于平稳。图1为恒阻抗电极控制结构图。Is为电弧电流设定值,Ud为变压器空载电压,If为实测电弧电流,Uf为实测电弧电压。通过控制弧长,即电极位置,使Uf/If=Ud/Is等式恒成立,也就是说维持电压与电流的比值始终为一个常数,又因为两者比值为阻抗,所以称作恒阻抗控制。当实际测得的Uf/If
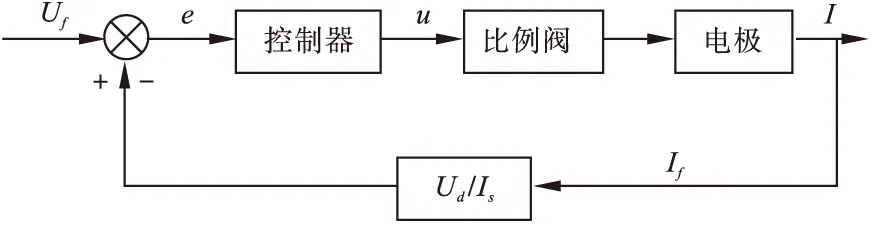
图1 恒阻抗电极控制结构图
2 模糊自适应PID控制器的设计
电弧炉系统是一个随机干扰十分严重的时变系统,它具有非线性、随机性、多变量、强耦合等特点。目前我国多采用传统的PID控制作为电弧炉电极调节系统,但是对于这种具有强非线性及模型参数时变的控制对象,控制效果并不理想,甚至远远达不到控制的基本要求。这是因为传统的PID控制器参数是通过人工经验进行整定的,PID的参数已经调整好并且固定不变,当电弧炉炼钢期间系统参数发生变化或电路故障时,就需要重新整定PID的参数,以保证电弧炉稳定运行。常规PID控制器无法在外界干扰时对系统参数进行优化,而且整个过程的调节时间很长,不仅耗时、耗力、耗能,又降低了产量。因此,对于电弧炉这种具有时变性的复杂非线性控制对象,且具有较强不确定性的控制系统,需要设计一种集成的、综合的智能控制方法来解决越来越复杂的控制问题,从而弥补单一PID控制的不足[5]。
通过以上分析可以看出,由于电弧炉电极调节系统具有非线性、多变量、时变性的特点,因此无法依据常规理论建立精确的数学模型。模糊理论是解决这一问题的有效途径,其优点是不需要建立被控制对象的数学模型,只依靠人类的控制经验,而且系统具有较强的鲁棒性,适用于非线性、多变量、滞后、时变的控制系统。将模糊控制和PID控制结合起来是一种比较理想的控制策略,既能发挥模糊控制较强的适应能力和鲁棒性,使系统具有良好的动态响应,又能发挥传统PID控制高精度的特点[6],使系统静态特性好。本文设计的模糊自适应PID控制器如图2所示。通过在线辨识和修正过程的模糊模型,从中获得所需要的模糊控制规则,进而自动调整PID的参数,实现了PID参数的自整定,使PID控制器具有自适应性能。考虑到电弧炉三相电极间的强耦合性,采用恒阻抗控制策略,由此来实现对电弧炉三相电极的去耦合。
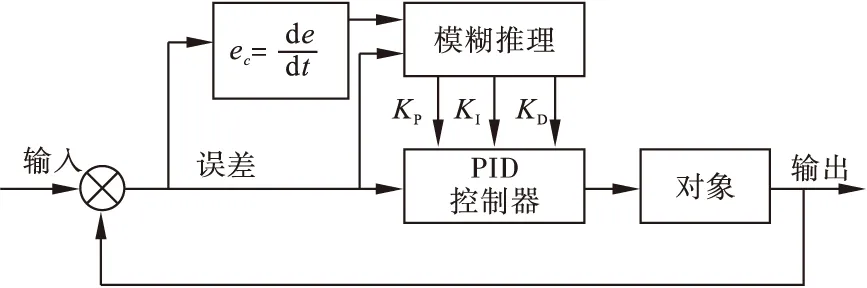
图2 模糊自适应PID控制结构图
将误差e、误差的微分(即误差变化率)ec作为模糊控制器的输入,PID的三个参数KP、KI、KD作为模糊控制器的输出。其基本原理是:将被控量的实际值与设定值进行比较,得到误差e,并且计算出误差变化率ec,然后将e和ec分别量化成模糊量,然后再由e,ec和模糊关系矩阵R,根据模糊推理合成规则进行模糊决策,得到模糊控制量KP、KI、KD,最后将KP、KI、KD解模糊得到精确值,作用于PID控制器,从而实现模糊PID控制。
在输入和输出的论域上分别定义七个语言子集{负大,负中,负小,零,正小,正中,正大}={NB,NM,NS,ZO,PS,PM,PB}。
2.1 模糊控制规则
PID三个参数的整定要考虑在不同条件下的相互作用和相互影响。因此从系统的稳态误差、超调量、调节时间等方面来考虑KP、KI、KD的作用。比例系数KP可以缩短系统的调节时间,提高系统的响应速度,使系统具有良好的控制精度。当系统产生较大偏差时,应及时调整KP以减小误差。KP越大,响应速度越快,此时系统很容易产生超调和振荡,因此不能取过大的KP值;但如果取值偏小,则会降低系统的响应速度和控制精度,影响系统的静态和动态特性。
积分系数KI可消除系统的静态误差。KI越大,静态误差的消除速度越快,但在响应的初始阶段会出现积分饱和现象,增大超调量,使系统的动态性能变差;减小KI,积分作用变弱,则难以消除系统的静态误差,从而延长了系统达到稳定状态的时间,影响了系统的响应速度。
微分系数KD可增强系统的动态特性,在响应过程中提前预测偏差的变化趋势,使偏差向反方向变化,产生超前的控制效果,减小了系统的超调量,增强了系统的稳定性。而KD过大不但会降低系统的抗干扰性能,还会使系统响应提前进入制动状态,从而减慢了系统的响应速度,使动态特性变差。
根据对现有控制系统设计经验的总结,可以得出PID参数KP、KI、KD的自整定规律如下[7]:
(1)当|e|较大时,为避免系统出现过大的超调量,使KP增大,KI减小,且取KD=0以提高系统的响应速度。当|e|趋于稳定时,取较小的KP和适当的KD和KI,以防止较大的超调量对系统响应产生影响。当|e|较小时,增大KP和KI,使系统响应保持稳定,取合适的KD,以免在系统响应的平衡位置出现大幅振荡。
(2)当e×ec>0时,表明|e|不断增大,此时电极控制器需发挥实时调整的作用,增大KP,减小KD和KI,以抑制|e|的增长,使|e|朝减小的方向变化。
(3)当e×ec<0或e=0时,表明系统已达到稳定状态或者|e|在不断减小。此时不需要调整任何参数,使电极控制器的输出保持不变。
(4)当e×ec=0 且e≠0时,表明误差的变化率ec为零,此时系统的响应曲线应与理想曲线平行或重合。为了增强系统的抗干扰能力,避免在给定值附近发生振荡,应选取合适的KD值,同时为了使系统保持稳定,应选择较大的KP和KI。
KP、KI、KD的模糊控制规则如表1。
2.2 隶属函数的选取
根据系统运行的情况,取误差信号e的取值范围为[-3,3],误差变化率ec的取值范围为[-4,4],输出KP、KI、KD的取值范围为[-1,1]。
一般来说,模糊控制器的分辨率和灵敏度与隶属度函数的形状有关,隶属度函数曲线越陡,灵敏度和分辨率就越高。相反,如果选隶属度函数曲线越平缓,模糊控制器的稳定性能越好。因此,在误差趋于零的区域,通常选择高灵敏度的隶属度函数,在误差变化较大的区域,选择低灵敏度的隶属度函数,以保持系统良好的稳定性和鲁棒性。本文选取输入e、ec和输出KP、KI、KD为均匀分布的三角形隶属度函数,以便节省在线计算的时间。输入输出变量的隶属函数如图3所示。

表1 KP、KI、KD的模糊控制规则表
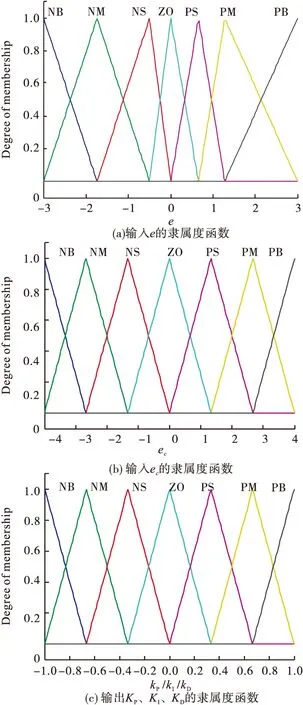
图3 输入输出变量的隶属度函数
在确定了模糊控制器的输入输出隶属函数后,根据系统当前状态和模糊控制规则进行模糊推理,得到模糊控制器的输出KP、KI、KD模糊值,为了得到精确的输出控制量,拟采用加权平均法,然后将得到的精确控制量KP、KI、KD施加于PID子系统,由此实现对PID参数的自整定。
3 仿真
以75t/10MVA的电弧炉电极调节系统为例,运用所设计的模糊自适应PID控制器对电极升降系统进行仿真。在Simulink环境下[8]设计的电极调节系统如图4所示。
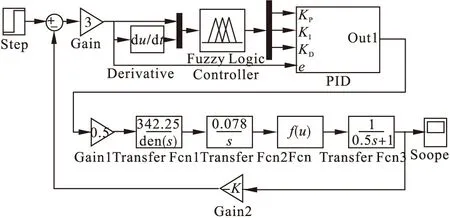
图4 恒阻抗策略的模糊自适应PID电极调节系统结构图
其中,伺服阀执行环节近似为一个比例环节,其传递函数为
G1(s)=0.5
(1)
液压装置系统的传递函数为
(2)
电极与支撑机构是一个由速度到位置的积分环节,其传递函数为
(3)
系统主电路部分电压表达式为
(4)
系统整流环节传递函数为
(5)
PID的子系统如图5所示。

图5 PID控制子系统结构图
设定弧长的给定值为0.05m,经过大量的实验统计,取KP=5、KI=1.1、KD=0.4,采用常规PID控制的仿真结果如图6所示。

图6 常规PID控制的仿真结果
基于恒阻抗和恒电流策略的模糊自适应PID电极调节系统的仿真结果如图7所示。
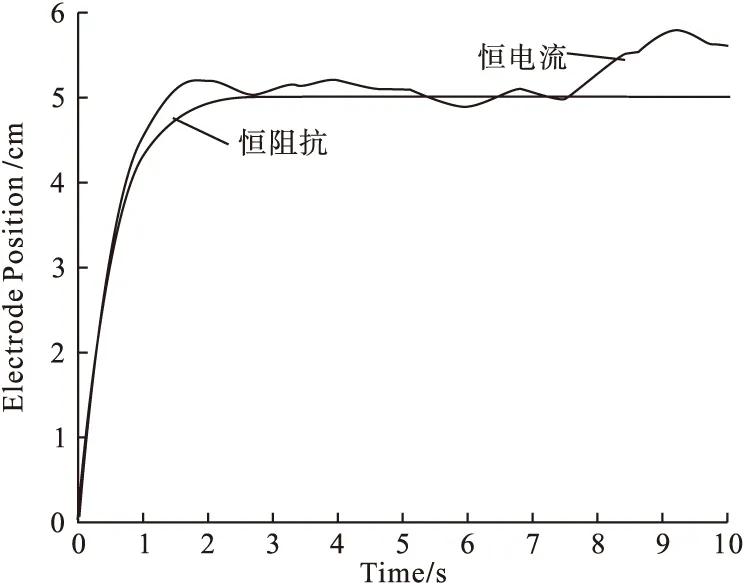
图7 模糊自适应PID控制的仿真结果
4 结束语
针对传统PID控制的不足,采用模糊控制与PID相结合的方法,通过仿真结果的对比可以看出,与传统PID控制相比,模糊PID电极控制系统具有较小的超调量、较短的调节时间及较高的稳态精度等特点。此外,与恒电流控制策略相比,恒阻抗控制策略可以削弱三相电极间的耦合作用,有效控制电极的升降。该控制器可实现电弧炉生产的综合自动化和生产过程的最优化。
[1]蒯熔,刘小河.电弧炉电极调节系统的模糊-PID控制研究[J].机床与液压,2008,36(7):270-272.
[2]张琳.电弧炉电极调节系统控制方法的研究[D].沈阳:东北大学,2008.
[3]程晓明.电弧炉电极液压升降控制系统研究[D].沈阳:东北大学,2010.
[4]池世春.模糊PID算法在电弧炉电极控制中的研究[D].沈阳:东北大学,2005.
[5]魏建成.高阻抗电弧炉电抗选择的研究[D].沈阳:东北大学,2005.
[6]Kevin M.Passino,Stephen Yurkovich.Fuzzy Control [M].Beijing:Tsinghua University Press Addison-Wesley,2001:22-23.
[7]田海,李军.基于Matlab的模糊自整定PID控制器仿真研究[J].工业控制计算机,2011,24(6):24-27.
[8]Bekker JG,Crai IK,Pistorius PC.Modelling and Simulation of an Electric Arc Furnace Process [J].ISIJ,1999,39(1):23-32.
(责任编辑:马金发)
Design of Fuzzy Adaptive PID Controller of the Electric Arc Furnace Electrode Regulator System
LU Jun,LI Liang
(Shenyang Ligong University,Shenyang 110159,China)
Electric arc furnace steelmaking system has a character of multivariable,nonlinear and strong coupling,and it is difficult to use traditional PID control to achieve ideal control effect.Based on the control strategy of constant impedance,a fuzzy adaptive PID controller is designed by using basic theory and method of fuzzy mathematics,and the controller can adjust PID parameters in real time and makes the electrode regulator system work in the best state.The simulation results show that the proposed controller can effectively regulate the rise and fall of the electrode and control the arc length at an expected value.It can be applied to reduce energy consumption and improve steel product quality.
electric arc furnace;electrode control;three-phase coupling;constant impedance;fuzzy adaptive PID
2013-03-31
国家自然科学基金资助项目(51377110)
鲁军(1965—),男,副教授,研究方向:智能材料及智能控制系统、电工理论与新技术.
1003-1251(2015)02-0001-05
TP273.3
A
