口服液生产线搬运机械手系统设计
2015-02-20
(辽宁工业大学 机械学院,辽宁锦州 121001)
目前在一些药品生产线的装盒过程中仍然需要人工参与,在口服液制成到包装完毕过程中,口服液数量较多并且不希望发生人与药品的接触,当需要将整齐排列的口服液从一个工位转移到另一工位时,就需要这样一台专业设备来完成。在给料传送带上摆放着整齐的需要装盒的瓶装口服液,如果使用人工来完成不能保证速度和精度,采用可以大批量抓取口服液的全自动高效率高精度机械手,既保证了抓取的准确度也提高了生产效率。采用PLC控制,具有可靠性高、抗干扰能力强、使用方便等优点,实现送瓶、取瓶、转移、放瓶的自动化和搬运的高效率与高精度。
1 机械结构的设计
本次设计的机械手主要完成从一传送带上运过来的瓶装口服液,搬运并放到另外一条生产线上,并且口服液的摆放方向旋转90度,装入到包装槽内。根据工艺分析,确定该机械手的结构,主要由以下几部分组成:底座旋转机构,吸盘机械手旋转机构和吸盘机械手升降机构。底座旋转机构直接由底座步进电机通过联轴器、传动轴带动机械臂实现整体旋转。吸盘机械手旋转机构和吸盘机械手升降机构安装在机械臂上,吸盘机械手升降机构采用升降步进电机通过同步带驱动丝杠实现机械手的升降运动。为使结构紧凑,吸盘机械手旋转机构采用旋转步进电机通过同步带驱动花键副实现吸盘机械手旋转运动,同时保证机械手的直线上升下降。由于瓶子比较小,采用真空吸盘来吸取口服液瓶,一次可吸附72瓶。

图1机械手总体结构图
2 控制系统的设计
机械手选用了S7-200系列CPU226作为主控制器完成自动化控制。手动/自动按钮实现手动控制和自动控制切换。真空电子压力表主要是检测吸盘的力是否能吸取口服液瓶。电磁方向阀信号是用来控制吸瓶和放瓶动作。根据计算、校核,底座旋转电机型号为110BYGH350D,配套驱动器型号为:3M2060H;旋转步进电机和升降步进电机型号为7BYGH93-401A,配套驱动器型号为:2M542-N。真空发器型号为ZH10DS-06-06-08型,真空吸盘选用SMC公司的ZPT16BF-A6型。输入输出地址单元分配表如表1所示。

表1输入输出地址单元分配表
软件自动化程序流程图如图2所示。首先系统上电复位,然后按下启动按钮,如果口服液瓶已到位,吸盘机械手下降,吸取工件,是否吸住可通过压力传感器检测,吸好后吸盘机械手上升,底座步进电机使机械臂旋转到放瓶上方,同时在机械臂上的吸盘机械手旋转机构旋转,使口服液瓶同时旋转90度,与另一传输线方向一致,吸盘机械手下降,放下口服液瓶,之后吸盘机械手上升,上升到位后,吸盘机械手旋转机构反向旋转,同时底座步进电机带动机械臂反向旋转到原位,旋转到待抓取口服液上方,准备下一循环。
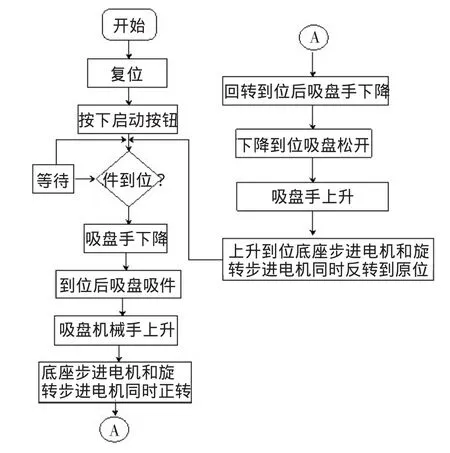
图2程序流程图
3 结论
根据口服液自动化生产工艺选确定传动和驱动方案,确定出结构紧凑的搬运机械手,给出了系统I/O分配,编制了控制软件,实现了自动化搬运过程,提高了生产效率。
[1]于殿勇,刘兴义.基于PLC与触摸屏控制的搬运机械手的应用[J].制造业自动化,2009,31(8):121-123,127.
[2]肖艳军,李磊,周 婧,等.基于PLC的自动续料机械手[J].机械设计与制造,2011,(2):152-153.
[3]王晓磊,李晓丹.基于PLC的高压测漏机控制系统设计与分析[J].机床与液压,2013,4(8):102-103.
[4]王明武.基于PLC的全自动铝锭码垛机设计[J].机床与液压,2012,(2):62-64.
[5]詹长书,李军,等.汽车燃油系统测漏仪的研制及其应用[J].机床与液压,2004,(2):105-106.
