基于FPGA的电机驱动矢量控制系统
2015-02-20
(东北大学信息科学与工程学院,辽宁 沈阳 110004)
电动汽车主要包括车载电源、电池管理系统、电机和电机驱动器等部分组成。异步电机具有结构简单,制造、使用和维护方便,运行可靠以及质量较小,成本较低等优点,成为多数交流驱动电动汽车的首选[1]。电机作为电动汽车的动力单元,它与能量源之间的能量流动和功率的输出是通过电机驱动器来控制的。主控芯片作为电机驱动器的核心,根据传感器信号和电机转子位置信号经控制策略处理后输出脉冲宽度调制波形[2],此波形经过功率驱动电路放大后控制逆变电路功率器件的导通状态,进而驱动电机旋转。比较常见的芯片选取方案是以数字信号处理器(Digital Signal Processor,DSP)为控制核,软硬件协同设计的控制策略[3]。但值得注意的是,交流伺服控制器结构复杂,涉及大量复杂运算,包括对旋变进行直接解码时的反正切运算,进行Clark-Park变换时的正余弦运算,以及空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)的扇区判断时需要的坐标系转换。这些运算在DSP中通常采用查表方式。在一些要求精度高,速度快,可靠性高的场合,需要精确测量转子的位置并进行复杂的解耦运算,常用的基于DSP的方案容易受电机参数,尤其是转子电阻的影响,很难满足实际使用的要求[4]。
针对DSP控制出现的问题,本文提出了一种基于FPGA的控制方法。与传统DSP控制相比,FPGA控制具有以下三个特点:一是FPGA使用纯硬件的方式处理数据,具有更快的响应时间,能够实现更高精度的控制;二是FPGA代码具有模块化特点,这将增强系统的可扩展性,同时大大降低了成本;三是,由于FPGA有着规则的内部逻辑块阵列和丰富的线性资源,特别适合用于细粒度和高并行度结构的FIR滤波器的实现,相对于串行运算主导的通用DSP芯片来说,并行性和可拓展性更高[5]。
鉴于以上分析,本文主要实现了一种基于FPGA的以三相异步交流电机为控制对象、IGBT为功率单元、矢量控制为控制策略的电动汽车驱动系统。同时引入CORDIC算法对逻辑单元中涉及到的三角函数运算做了优化,并加入了对AD产生信号的FIR滤波,提高了系统的准确性、可靠性。
1 系统硬件平台
整个系统硬件平台主要包括:三相交流异步电机、功率逆变模块、驱动模块、FPGA控制模块、电压电流采集模块。电机驱动部分的系统框图如图1所示。其中,三相交流异步电机是动力输出装置,为汽车的运行提供动力源。同时,电机将通过安装的光电编码器将脉冲发送给FPGA。FPGA控制模块负责产生控制电机所需的逻辑信号和接受来自用户的指令。驱动模块在FPGA的逻辑信号控制下,输出相应的电压到功率逆变模块上来控制IGBT的开启和关闭。功率逆变模块是由六个IGBT组成的三相逆变单元,在驱动模块的驱动下跟随FPGA的逻辑信号输出对应的SVPWM波[6]。电压电流采集模块负责采集电机上电压和电流值,经过A/D转换后发送到FPGA.

图1电机驱动单元系统框图
2 系统工作原理
首先采集三相异步电机的电流与电压信号,将电流与电压模拟量经过A/D转换器转换成数字信号并送入FPGA,然后采集转速信号并计算转速值物理量。根据所述电机的电流、电压和转速信号,结合用户发送的调节信号,采用矢量控制算法得到控制信号,输出所述控制信号至驱动单元。系统控制的具体步骤如下:
将利用霍尔传感器采集到的电机的电流、电压信号进行滤波处理,同时将用户发送的控制信号传递至矢量控制模块。而转速信号的采集则通过光电编码器,利用FPGA的等精度采集方法,记录脉冲个数后,根据相应的公式计算得到所需转速值物理量;将用户发送信号与计算得到的转速值输入至外环PI调节器,与Clark-Park变换的电流值作比较,并输入到内环PI,系统设定值与Clark-Park变换的另一值比较后也输入至内环PI调节器。以上两组结果采用Park逆变换得到电压值,将电压值计算经SVPWM得到控制信号,输出所述控制信号至驱动单元。采用FIR滤波器进行滤波处理,它可以保证在任意幅频特性的同时具有严格的线性相频特性,同时其单位抽样响应是有限的,因而滤波器是稳定的系统。矢量控制系统具体操作框图如图2所示。

图2矢量控制系统操作框图
考虑到现代汽车的智能化趋势,本设计也加入了NIOSII软核处理器和控制器局域网总线(Controller Area Network,CAN)IP核,利用CAN总线接收来自驾驶员的控制信号,然后交由CPU传递给逻辑控制部分执行,从而实现了整个系统的设计。CAN总线模块用于接收用户发送的调节信号,NIOS软核处理器用于将所述用户发送的调节信号传递至矢量控制模块,矢量控制模块用于将用户发送的调节信号与计算得到的转速值比较后输入至外环PI调节器,该值将与系统设定值一道,分别和电流值经滤波、Clark-Park变换后得到的参考值比较,然后输入至内环PI调节器,采用Park逆变换得到电压值。图3是CAN总线和NIOS II软核处理器的逻辑功能图。
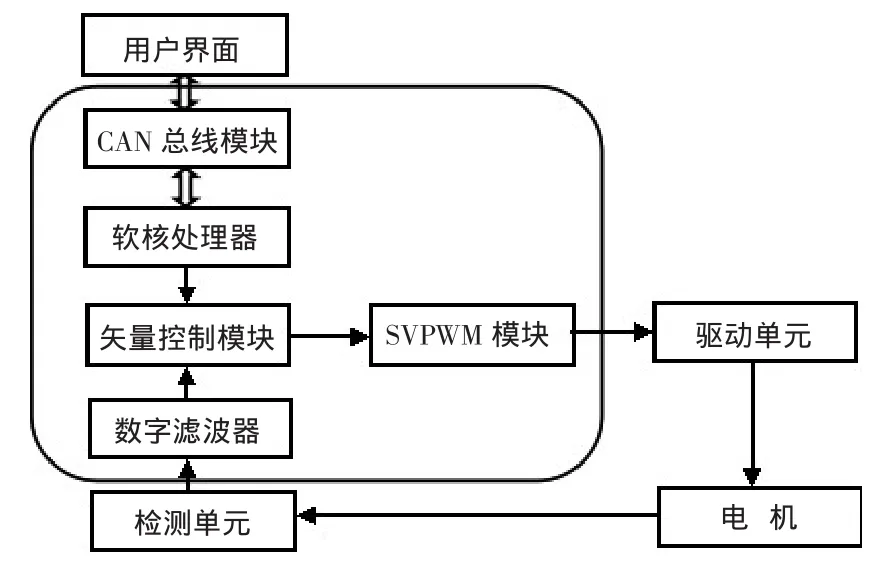
图3 CAN总线和NIOS II软核处理器的逻辑功能图
矢量控制算法的核心就是将交流电机经模型转换模拟为直流电机从而进行控制,为了实现这一目标,需要将交流电机的物理参数转化为直流电机的参数[7]。从物理意义上讲,需要将三相静止轴ABC坐标系通过坐标转换成为两相同步旋转轴MT坐标系。Clark变换和Park变换即为实现这一目标的转换。Clark变换就是将定子电流投影到MT坐标系,分解为分别控制励磁电流分量和转矩电流分量的im和it,而Park变换则是实现旋转的直流系统向两相静止直角坐标系的转换。以下是由三相静止轴ABC坐标系到两相同步旋转轴MT坐标系的变换公式如下:

式中:N2和N3是两种系统每相绕组的有效匝数;θ为转子磁链位置。
在实际进行Clarke变换和Park变换时,本文采用CORDIC算法,其核心思想是将旋转角度分为若干极小角度,使用迭代的方法进行运算从而逼近所求角度[8]。设矢量(Xi,Yi)旋转角度θ变为矢量(Xj,Yj),用矩阵形式表示为:

这里使用迭代的思想,将一个旋转角度分解为n个极小的角度,相邻极小角度之间的关系可以表达为:

经过对θ的进一步限制,加入尚未旋转角度Z0,并考虑多次迭代的极限逼近情形,最终迭代式变成:
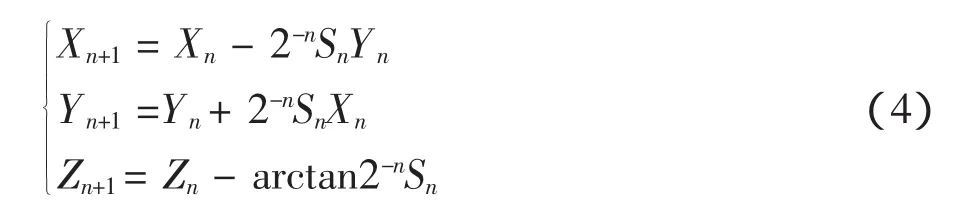
计算坐标变换时,输入

进行多次迭代后得到最终输出:

其中:k是cosθn经过无数次迭代的无限逼近值。
与常用的计算三角函数、反三角函数以及双曲函数及其他超越函数的ROM查表法、多项式近似法等相比,CORDIC算法具有不需要硬件乘法器、可使用流水线、可循环迭代的突出优势。另外,它的计算方式符合硬件算法的模块化特点,从而便于在FPGA中实现[9]。
三相异步交流电机同驱动单元、检测单元、控制单元及用户界面的关系如图4所示。检测单元用于采集电机的电流、电压和转速信号;FPGA控制单元用于根据电机的电流、电压和转速信号,结合用户发送的调节信号,采用矢量控制算法得到控制信号,输出控制信号至驱动单元;驱动单元用于根据所述控制信号,驱动电机工作,其中,电机分别与检测单元、驱动单元相连,FPGA控制单元分别与检测单元、驱动单元相连。

图4 电机与控制单元、驱动单元、检测单元及用户的关系
3 仿真实验
在Matlab环境中建立了仿真系统以验证这些控制算法。仿真模型的主电路图如图5所示。
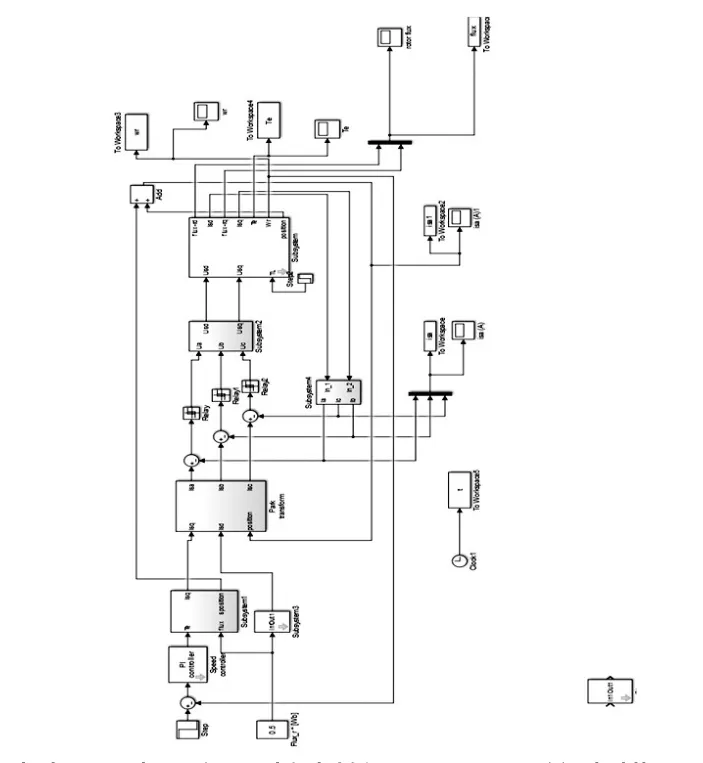
图5电机驱动器矢量控制的Simulink仿真模型主电路图
然后根据所用矢量控制算法编写了坐标转换、SVPWM、PI控制、速度计算、系统过压、过流保护的Verilog代码,并且进行编译调试,验证了子程序的正确性。最后将驱动程序下载到设计的FPGA上,连接示波器进行观察。图6是观察到的结果。可见,在功率模块输入电压稳定的情况下,定子电流基本达到接近正弦波,同时转子速度和磁矩都保持稳定不变,基本达到控制系统的要求。

图6示波器显示结果图
由此可以看出,该设计满足了电动汽车系统的性能要求。
4 结束语
本文设计了一种基于FPGA的电动汽车电动机驱动系统,该驱动器使用IGBT作为功率单元,利用矢量控制作为控制算法,在FPGA上实现了逻辑控制功能,与传统DSP系统控制相比,能够进行复杂的解耦运算,精确测量转子的位置,精度更高,速度快,可靠性高,为后续丰富和完善驱动器功能奠定了基础。仿真结果显示,该设计能够使系统平滑启动,快速响应给定的指令,具有较强的抗干扰能力,可以有效地实现电动汽车电机驱动的控制。
[1]Yin-hai Z,Zhi-kui C.An asynchronousmotor vector control system considering the variation of rotor resistance[J].Networking and Distributed Computing(ICNDC),2012 Third International Conference on,2012:140-143.
[2]万晓凤,朱俊裕,肖 京.纯电动汽车三相异步电动机矢量控制[J].微特电机,2012,(1):61-63.
[3]赵争鸣,袁立强,孟朔,等.通用变频器矢量控制与直接转矩控制特性比较[J].电工技术学报,2004,19(4):81-84.
[4]Shen J,LuoW,YangC,etal.Design three-phaseasynchronous motor's vector control system based on DSP[J].Internet Computing and Information Services,2011 International Conference on,2010:230233.
[5]Guo-qing Y,Ying Z,Yong-wei L.Research of DSP-based SVPWM vector control system of asynchronousmotor[C].//Computer Science and Electronics Engineering(ICCSEE),2012 International Conference on.IEEE,2012:151155.
[6]Zhi-ou X,Guo-jun T.Study on vector control system of asynchronousmotorbased on simplified three-level SVPWM[J].Electric Information and Control Engineering(ICEICE),2011 International Conference on,2011:17501754.
[7]Jian-xin Z,Ting X,Jian-hui L,et al.Research and analysis ofmodified SVPWM control in asynchronousmotor[J].Modern Manufacturing Engineering,2009,29(7):111-114.
[8]吴 恒,王淦泉,陈桂林.CORDIC算法在基于FPGA的PMSM控制器中的应用[J].电机与控制学报,2009,13:113-118.
[9]杨 运,唐晓春,邓世刚.CORDIC算法在基于FPGA的旋变解码和PMSM矢量控制中的应用[J].微电机,2013,46(7):68-73.
[10]Wang X,Yang Y,Liu W.Simulation of vector controlled adjustable speed system of induction motor based on simulink[J].Computer Science and Service System(CSSS),2011 International Conference on,2011,(8):2563-2566.
[11]吴 慰,黄 烜.三相交流异步电机控制系统仿真[J].计算技术与自动化,2011,(3):68-72.
