BDS/GPS系统时差的组合实时预报模型分析
2015-02-15付文举黄观文
付文举 张 勤 黄观文
1 长安大学地质工程与测绘学院,西安市雁塔路126号,710054
兼容性是北斗卫星导航系统(BDS)的4大建设原则之一,其目标是实现与世界各卫星导航系统的兼容与互操作[1]。系统时差作为兼容与互操作的重要组成部分,对其进行监测和预报具有重要意义。BDS/GPS系统时差是指BDS系统时间(BDT)与GPS系统时间(GPST)之差。GPST 采用美国海军天文台(USNO)维持的原子时,规定在1980-01-06 0:00与协调世界时(UTC)完全一致,与国际原子时(TAI)之差为19s。BDT 采用中国国家授时中心(NTSC)维持的原子时,在2006-01-01 0:00设置与UTC 一致,与TAI之差为33s[1]。虽然很多学者对系统时差的解算方法进行了深入研究[2-3],但是对系统时差预报方法的研究较少。本文重点研究了BDS/GPS系统时差的组合实时预报方法,分析了改进的多项式预报模型、AR 模型以及组合实时预报模型和预报精度。
1 改进的多项式预报模型
短期的BDS/GPS系统时差时间序列具有线性或抛物线特性,且具有周期性变化趋势,因此基于系统时差数据的多项式预报模型常采用一次或二次多项式模型(简称为MP)。本文采用的时差数据来源于上海天文台,通过将接收机外接时间频标,并扣除已校正的硬件时延偏差等,采用PPP技术解算,将能够模型化的误差采用模型扣除,不能模型化的误差和时差参数一起估计,得到能够反映BDS/GPS系统时差变化规律的时差数据。图1为2013年第113~114d的BDS/GPS系统时差时间序列,呈线性变化,其他时间序列段的时差也呈现相似的规律。
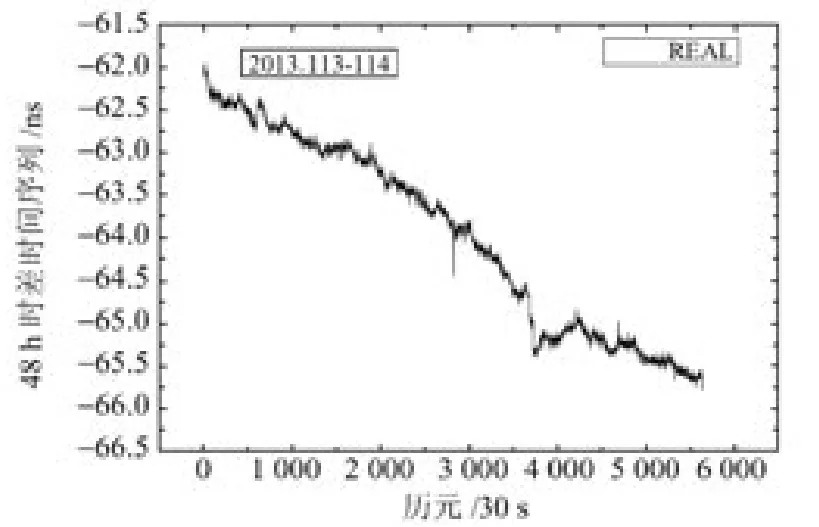
图1 BDS/GPS系统时差时间序列Fig.1 BDS/GPS system time offset sequence
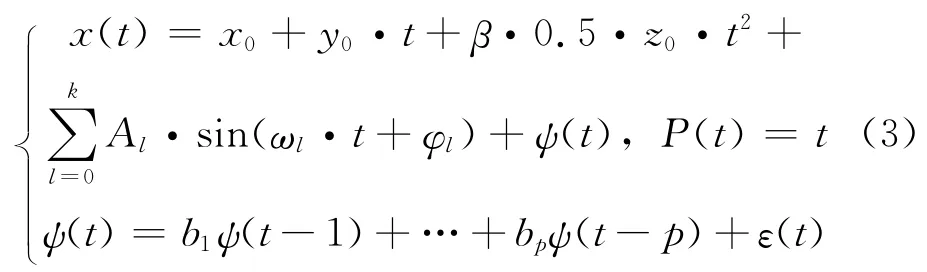
本文对多项式模型进行3方面改进:1)比较拟合数据段残差的标准差来选择一次多项式或二次多项式模型;2)采用快速傅里叶变换确定显著周期项,进行周期项预报;3)根据离预报历元远近来确定观测权矩阵以改进随机模型,进而得到改进的多项式预报模型(简称MPP)[4]:
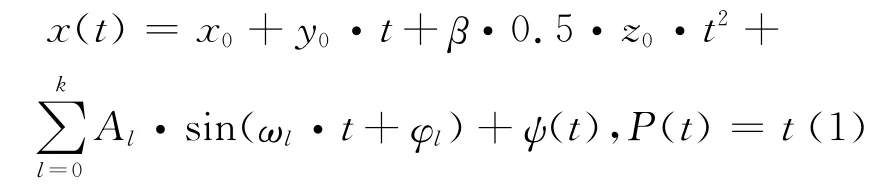
其中,t为历元时间;x(t)为系统时差观测值;x0为常数项参数,y0为一次项参数,z0为二次项参数;β取值为0或1(当一次多项式拟合残差标准差小于二次多项式拟合标准差时,β为0;反之,β为1);Al、ωl、φl分别为周期项的振幅、角速度、相位;ψ(t)为观测残差;P(t)为观测值的权。
为分析改进多项式模型的预报精度,统计2013年第113、114d的多项式模型和改进多项式 模型的单天预报残差,如图2所示。
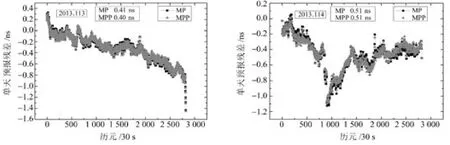
图2 多项式模型和改进多项式模型预报残差Fig.2 The predicting residual of MP and MPP
可以看出,多项式模型和改进多项式模型的预报残差序列非常接近,第113d的改进多项式模型的预报精度比多项式模型提高了0.01ns,第114d的预报精度两者相同,说明改进多项式模型的预报精度提高并不显著。为了进一步分析两种模型的预报精度,本文采用2013年第112~120d共9d的时差数据,统计多项式模型和改进多项式模型的单天时差预报精度以及最显著周期项的影响(表1、2)。
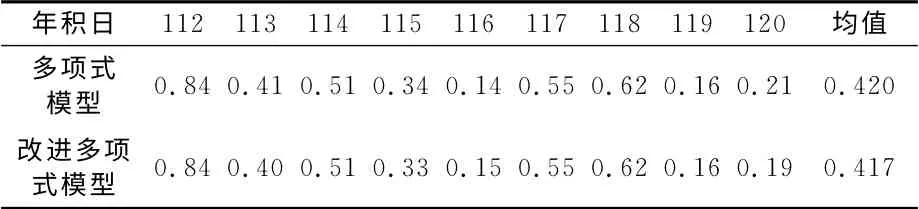
表1 多项式模型和改进多项式模型的单天预报精度/nsTab.1 The 24-hour predicting precision of MP and MPP model/ns
从表1看出,改进多项式模型比多项式模型的单天时差预报精度改善较小,分别为0.420ns和0.417ns。为了揭示改进多项式预报模型单天时差预报精度改善较小的原因,统计了2013年111~119d最显著周期项的周期和振幅(表2)。

表2 BDS/GPS系统时差最显著的周期和振幅Tab.2 The most significant period and amplitude of BDS/GPS system time offset
从表2可知,这些天的周期项并不显著,其振幅的均值为0.051ns,周期项改正对多项式模型预报精度的贡献较小。当周期项较显著时,周期项改正对多项式模型预报精度会有所提高。如第114d最显著周期项的振幅为0.129ns,以第114 d为拟合数据,预报第115d的时差,单天时差预报精度提高了0.01ns,最明显周期项为11.75h。这是由于卫星轨道周期约为0.5d[5-6],随着卫星的周期性运动,影响卫星钟时间的外界环境呈现周期性变化,考虑到导航定位系统时间是由卫星钟和地面钟综合得到纸面钟[3],因此系统时差的显著周期多为11.75h。但是,由于卫星钟还会受其他非周期性环境因素的影响,因此,系统时差的显著周期会发生变化。
2 BDS/GPS系统时差的组合实时预报模型
Box和Jenkins将自回归(AR)模型、移动平均(MA)模型和自回归滑动平均(ARMA)模型有机地组合在一起,使之成为一种综合的预测方法。ARMA 建模要求数据序列满足平稳性,但在实际中数据序列往往呈现出趋势性或周期性。这时,可以通过提取趋势项和周期项或者是差分的方法对时间序列进行处理,使其满足平稳性要求。基于差分后的数据序列建立的模型称为ARIMA 模型[7-8]。本文采用改进的多项式模型以及一次差分后AR 模型建立组合实时预报模型。
2.1 组合实时预报模型的建立
提取趋势项和周期项并进行一次差分后的系统时差数据序列可以认为是一组与时间相关的随机变量,没有确定的变化形式,不能用确定的函数描述,但可以用概率统计的方法寻求合适的随机模型来近似反映其变化规律。实际上,模型仅通过系统时差的自身历史观测值来反映有关因素对预测时差的影响和作用。因此,AR 模型定义[9]为:

其中,t为历元时间,ψ(t)为t时刻改进的多项式模型残差,p为AR 模型的阶数,ε(t)为AR 模型的观测噪声。
因此,BDS/GPS系统时差的组合实时预报模型(简称为MPP+AR)可以描述为:
2.2 组合实时预报流程
BDS/GPS系统时差组合实时预报方法的实现流程如下:
1)采用多项式模型预报,直接得到多项式模型的预报结果以及预报残差。
2)基于多项式模型,考虑二次项参数的自适应选取以及时间相关观测权函数,进行多项式模型预报,得到扣除趋势项的拟合残差。基于此拟合残差,利用快速傅里叶变换得到最显著周期项,进而计算周期性预报残差,得到改进的多项式模型预报结果以及预报残差。
3)对扣除周期项的拟合残差作一次差分,得到满足平稳性的拟合残差。在此基础上进行AR模型预报,得到差分后的预报残差。然后将其恢复得到AR 模型预报残差,结合改进的多项式模型预报结果,得到组合预报模型的预报结果以及预报残差。
2.3 组合实时预报流程的实现
基于BDS/GPS 系统时差实时监测数据,采用改进的多项式模型预报,获得其拟合残差,如图3所示。改进多项式模型的拟合残差已经去除了趋势性和周期性,进行一次差分,获得满足平稳特性的差分数据。然后,基于差分后的数据拟合出AR 模型,从而获得基于差分数据的AR 模型拟合预报时差(图4)。图5展示了拟合预报中间部分的若干历元。可以看出,基于差分数据的AR模型的预报值随着预报时间的增加而趋于恒定。
以改进多项式模型拟合残差的最后一个历元为起点,将基于一次差分数据的AR 模型预报值累加到该起点,得到AR 模型的预报值(图6)。利用此修正值对改进多项式模型的预报结果进行修正,从而得到组合实时预报模型的预报时差(图7)。可以看出,组合实时预报模型的单天预报精度优于改进多项式模型,分别为0.51ns 和0.29ns。
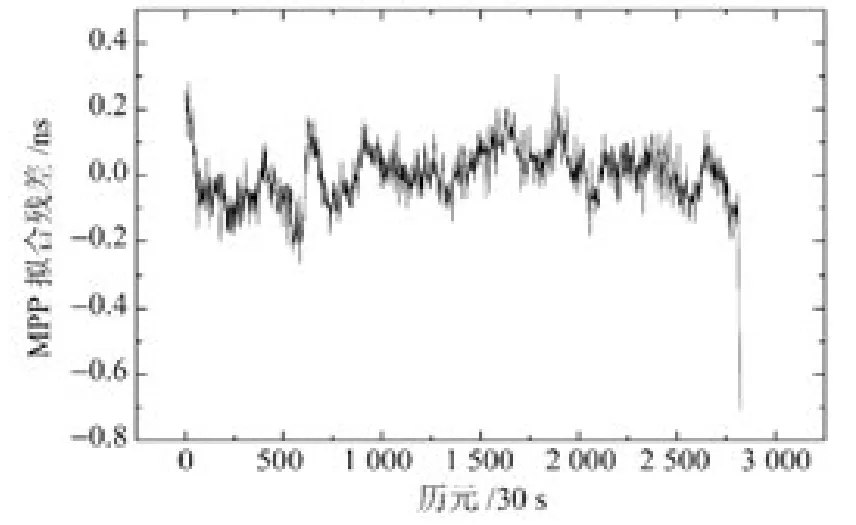
图3 改进多项式模型的拟合残差Fig.3 The fitting residual of MPP
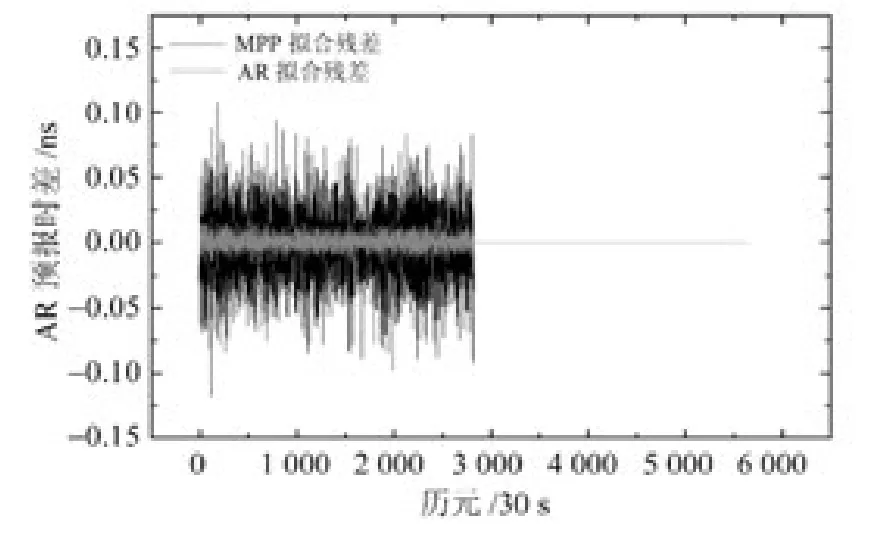
图4 基于差分数据的AR 模型拟合预报时差Fig.4 The fitting and predicting system time offset of AR model with different data

图6 AR 模型的预报时差Fig.6 The predicting system time offset of AR model

图7 改进多项式模型和组合实时预报模型预报残差Fig.7 The predicting residual of MPP and MPP+AR model
考虑到改进多项式模型拟合残差的最后一个历元可能会出现粗差,对AR 预报模型进一步优化。其主要思想是:改进多项式模型拟合残差的最后一个历元偏离拟合残差绝对值的均值较大时,组合实时预报模型直接采用改进多项式模型;否则,采用距离拟合残差绝对值的均值最小的拟合残差且最靠后的历元作为AR模型预报起点进行预报。如图8所示,方形曲线为BDS/GPS系统时差原始数据,圆形曲线为模型优化前的预报结果,三角形曲线为模型优化后的预报结果。可以看出,模型优化后的预报结果更接近于真实时差数据。
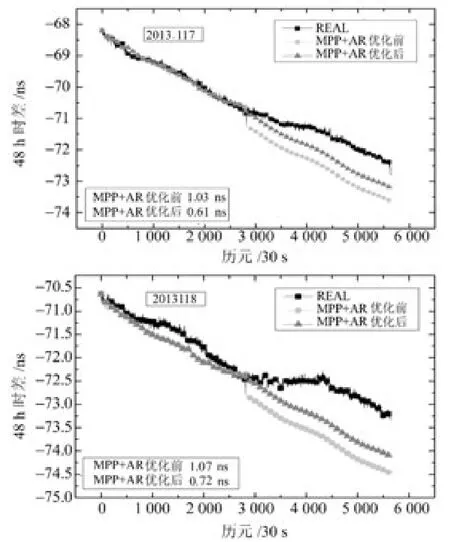
图8 优化后的组合实时预报模型预报结果Fig.8 The predicting results of combined real-time model after optimization
3 组合实时预报模型精度分析
因篇幅限制,本文仅统计了2013年第112~120d的组合实时预报模型与多项式预报模型的单天时差预报精度,以分析组合实时预报模型精度和可靠性,如图9、表3所示。
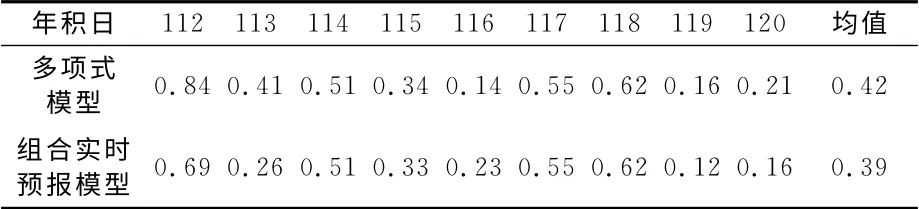
表3 组合实时时差预报模型和多项式模型的单天预报精度/nsTab.3 The 24-hour predicting precision of combined realtime model and MP model/ns
可以看出,采用组合实时预报模型的预报精度为0.39ns,比多项式模型提高了0.03ns,但组合实时预报模型的预报精度更加稳定,仅有1d的预报精度差于多项式模型,其他天均优于或等于多项式模型。
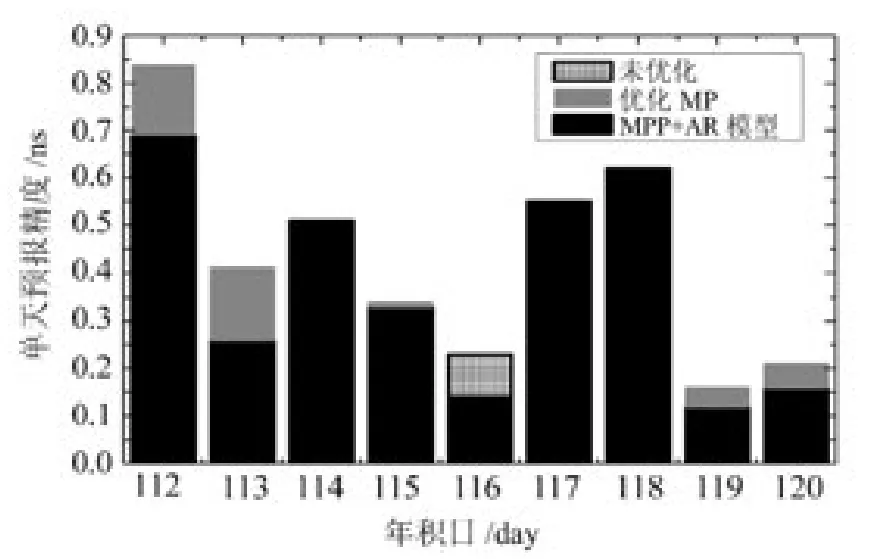
图9 组合实时时差预报模型和多项式模型的单天预报精度统计Fig.9 The 24-hour predicting precision of combined real-time model and MP model
4 结 语
本文构建的BDS/GPS 系统时差预报模型,考虑了时差序列的时钟参数特性、周期性以及随机补偿特性等,单天的时差预报精度优于0.4ns,优于传统的多项式模型;同时在算法稳定性方面,也显著优于传统的多项式模型。该模型同样适用于其他导航系统之间的实时时差预报。然而,实时时差预报数据预处理时要考虑粗差和钟跳等异常探测,在建立模型时也需要考虑两个系统实际上的物理时钟变化特性,这也是作者下一步的研究重点。
[1]孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学 出 版 社,2010(Kong Xiangyuan,Guo Jiming,Liu Zongquan.Foundation of Geodesy[M].Wuhan:Wuhan University Press,2010)
[2]朱琳,张慧君,李孝辉,等.全球卫星导航系统时差监测与修正方法研究[C].第4届中国卫星导航学术年会,武汉,2013(Zhu Lin,Zhang Huijun,Li Xiaohui,et al.Monitoring and Correction Method of the System Time Offset of Global Navigation Satellite System[J].The 4th China Satellite Navigation Conference,Wuhan,2013)
[3]陈俊平,张益泽,蔺玉亭,等.一种单站多卫星系统时差监测的新方法[C].第4 届中国卫星导航学术年会,武汉,2013(Chen Junping,Zhang Yize,Lin Yuting,et al.Precise GNSS Timing Bias Estimation Based on Single Multi-GNSS Station[J].The 4th China Satellite Navigation Conference,Wuhan,2013)
[4]Huang G W,Zhang Q,Xu G C.Real-time Clock Offset Prediction with an Improved Model[J].GPS Solutions,2014,18(1):95-104
[5]Heo Y J,Cho J,Heo M B.Improving Prediction Accuracy of GPS Satellite Clocks with Periodic Variation Behavior[J].Measurement Science and Technology,2010,21(7):190-190
[6]Senior K,Ray J,Beard R L.Characterization of Periodic Variations in the GPS Satellite Clocks[J].GPS Solution,2008,12(3):211-225
[7]杨元喜,崔先强.动态定位有色噪声影响函数——以一阶AR 模型为例[J].测绘学报,2003,32(1):6-10(Yang Yuanxi,Cui Xianqiang.Influence Functions of Colored Noises on Kinematic Positioning-Taking the AR Model of First Class as an Example[J].Acta Geodaetica et Cartographica Sinica,2003,32(1):6-10)
[8]徐君毅,曾安敏.ARIMA(0,2,q)模型在卫星钟差预报中的应用[J].大地测量与地球动力学,2009,29(5):116-120(Xu Junyi,Zeng Anmin.Application of ARIMA(0,2,q)Model to Predication of Satellite Clock Error[J].Journal of Geodesy and Geodynamics,2009,29(5):116-120)
[9]张清华,隋立芬,牟忠凯.基于小波与ARMA 模型的卫星钟差预报方法[J].大地测量与地球动力学,2010,30(6):100-104(Zhang Qinghua,Sui Lifen,Mu Zhongkai.A GPS Precise Clock Errors Prediction Model Based on Wavelet and ARMA[J].Journal of Geodesy and Geodynamics,2010,30(6):100-104)
