高精度机动车GPS测速仪校准技术研究
2015-02-09白银,孙桥,杜磊,于梅,白杰
白 银,孙 桥,杜 磊,于 梅,白 杰
(中国计量科学研究院,北京 100029)
0 引 言
高精度机动车GPS测速仪,由于其测速精度高,对天气环境要求较低,而且安装简便,正在越来越多地作为标准器具,对交通执法用机动车测速仪进行现场校准.因此对高精度机动车GPS测速仪校准技术的研究需求越来越迫切.国内对于高精度机动车GPS测速仪的研究大多集中在测速方法以及标准器具的研制上[1-3],也有研究者对GPS信号模拟器进行研究[4-6].英国研究者利用非接触式汽车速度计Correvit®对两款高精度机动车GPS测速仪(VBOX II和Microsat R20)进行检测,结果表明两款GPS测速仪与Correvit®之间的测速偏差均在±1m/h或%范围内,能够满足机动车现场测速检测的需求[7].此外,Racelogic公司使用非接触式汽车速度计和高精度机动车GPS测速仪同时对机动车的加速及刹车过程进行检测的速度-时间曲线比对结果表明:高精度机动车GPS测速仪的测速准确性与非接触测速仪相近,而在响应速度、信噪比和可靠性方面都优于非接触式汽车速度计[8].在GPS信号模拟器的溯源技术研究方面,瑞士国家计量院(METAS)利用标准器具比对的方法对GPS测速仪模拟器进行校准[9],我国的研究者对GPS信号模拟器的校准方法也已经有一定研究成果[10].尽管如此,目前还没有公认的高精度机动车GPS测速仪校准方法,仍有待进一步研究.为此,本文对同一台高精度机动车GPS测速仪分别进行了模拟测速误差校准和卫星信号回放测速误差校准,并分别进行了不确定度分析,验证了两种校准方法都能够作为高精度机动车GPS测速仪量值溯源的有效途径.
1 高精度机动车GPS测速仪工作原理

式中:c为真空中光速;VR为卫星相对用户接收机的径向速度,即卫星i与接收机j之间的距离变化率Rji,式(1)可简化为

GPS导航系统具有全球、全天候、连续、实时的精密三维导航与定位能力的优点.GPS测速是通过安装在运动载体上的GPS接收器获取GPS信号,从而得到运动载体的运动速度.GPS测速方法可分为单点测速、基于位置差分解算测速、基于速度修正差分测速、基于载波相位中心差分测速和基于原始多普勒频移解算测速.其中,前4种方法的测速准确度不仅与载波相位观测值的准确度有关,而且受到载体运动状态的影响.如果载体不是匀速运动,其速度测量准确度必定受影响,速度变化越大,速度测量误差就越大,所以这4种方法在测速精度要求较高的实际应用中并不多见[11].
基于原始多普勒频移观测值的解算方法是一种普遍使用的高精度GPS测速方法,基本不受载体运动状态的影响.多普勒频移是观测者接收到的GPS卫星载波频率fr与GPS卫星发射的载波频率fs之间的频率差fd,有
根据GPS单点定位的数学模型,对站星伪距进行微分后,得到单点测速的数学模型

式中:ρjk为第j颗卫星到测速仪的伪距变化率;δρjn,δρjp为电离层和对流层时间延迟的变化率;ρjk为站星伪距;r,r为测速仪的位置和速度向量;rj,rj为第j颗卫星的位置和速度向量;δtk,δtj分别为测速仪和第j颗卫星的钟速;εj为观测引入的噪声.在式(3)中,只有测速仪的三维速度和测速仪钟速4个未知数.理论上,如果能够观测到4颗或4颗以上的卫星,就可以利用最小二乘法求得载体的速度.
2 模拟测速误差
2.1 模拟测速误差校准
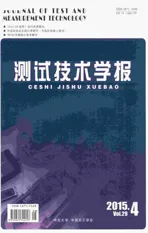
本文使用GPS信号模拟器和卫星信号场模拟装置对高精度机动车GPS测速仪进行模拟测速误差校准.GPS信号模拟器采用Spirent公司生产的GSS6700模拟器(型号GUSA-0120,出厂编号01201809),该模拟器具有GPS信号模拟、记录和回放功能,并能够使用自行编制的测速模拟程序创建与真实使用环境相近的场景,对高精度机动车GPS测速仪进行校准.本文利用这一功能,结合卫星信号场模拟装置,构建了模拟测速误差校准系统,该系统工作示意图如图1所示,系统实物如图2所示.
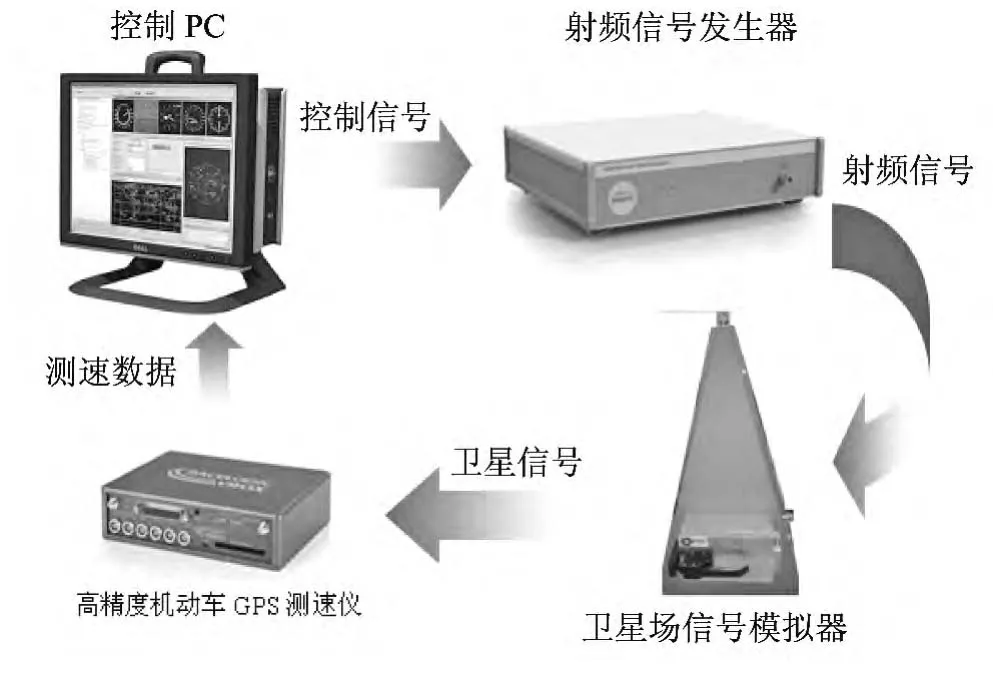
图1 高精度机动车GPS测速仪模拟校准系统工作示意图Fig.1 Schematic diagram of calibration system for high accuracy GPS vehicle speed meter
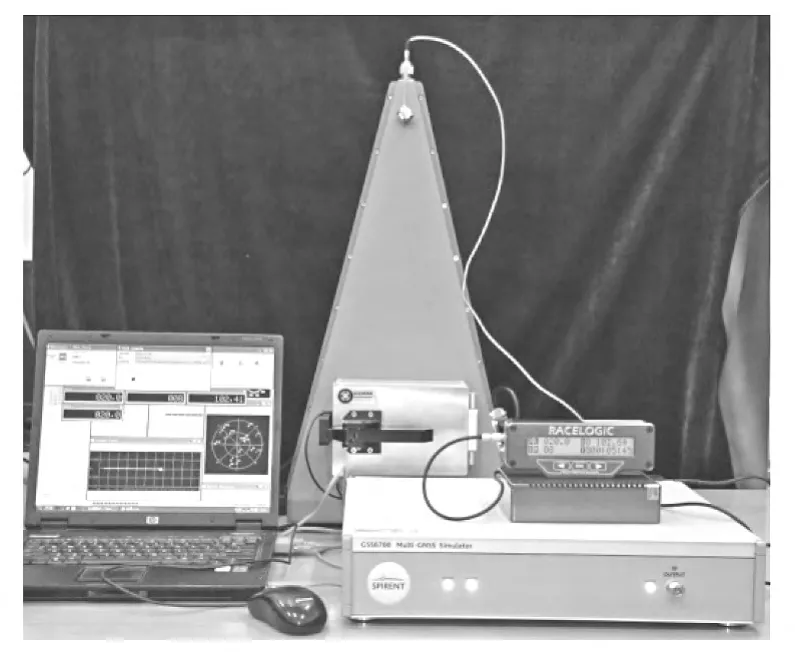
图2 高精度机动车GPS测速仪模拟校准系统图Fig.2 Photo of calibration system for high accuracy GPS vehicle speed meter
使用模拟测速误差校准系统对被校高精度机动车GPS测速仪(型号Racelogic VBOX III,出厂编号031183,刷新率100Hz)在(40~180)km/h范围内的模拟测速误差进行校准,结果如表1所示,校准过程中可用卫星数量9颗,每个速度点校准400次.为了与非接触式汽车速度计校准结果进行有效对比,测量误差的计算依照JJF 1193-2008《非接触式汽车速度计校准规范》的规定:不大于50km/h时,计算绝对误差(km/h);大于50km/h时,计算相对误差(%).
表1 高精度机动车GPS测速仪模拟测速误差实验结果Tab.1 Simulated measurement results of high accuracy GPS vehicle speed meter
2.2 GPS信号模拟测速误差校准不确定度分析
根据生产厂商提供的技术文件,GSS6700速度模拟精度a为±0.002 78km/h,速度模拟值在该误差区间内符合均匀分布,查非正态分布的标准编差与置信因子k值的关系表可得速度模拟值落在误差区间内的概率为100%时,k=,计算得B类不确定度uB=a/k=0.002 78/=1.6×10-3km/h.
以测量误差及测量重复性误差最大的60km/h作为参考速度值,进行不确定度评定.按照输入量的不确定度来源及评定,列出输出量的标准不确定度分量,如表2所示.
由于各标准不确定度分量相互无关,故合成标准不确定度为

合成相对标准不确定度为0.01%,故相对扩展不确定度为0.02%,k=2.

表2 模拟测速误差不确定度分量表Tab.2 Uncertainty budget of simulated calibration error
3 卫星信号回放测速误差
3.1 道路试验及回放校准试验
回放测速误差校准法使用光遮挡式标准装置记录的实测速度对高精度机动车GPS测速仪进行定标,使用GPS信号记录仪记录定标的卫星GPS信号,最后在实验室进行回放.试验原理如图3所示[12].
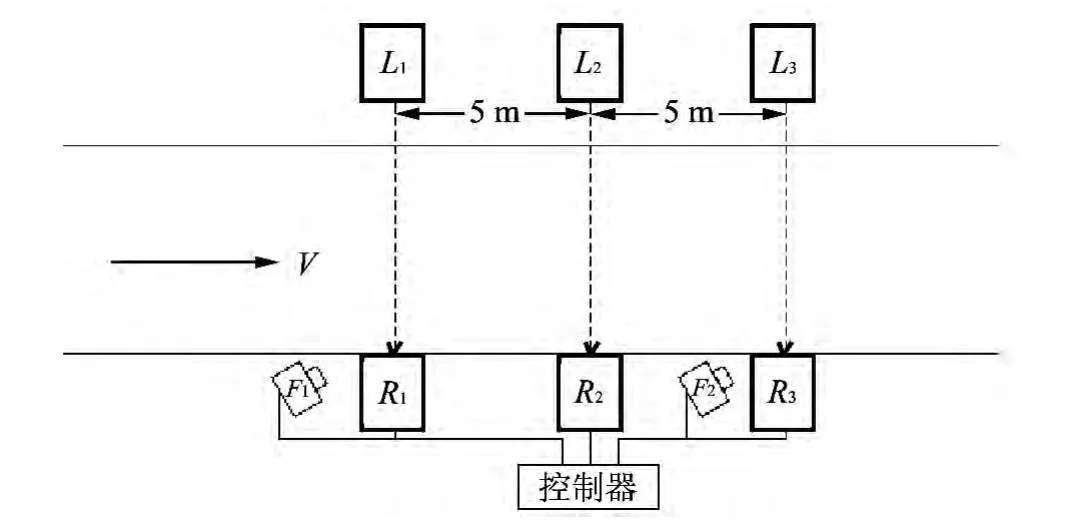
图3 三光束光遮挡测速标准装置工作原理示意图Fig.3 Schematic diagram of reference equipment based on three beams light barrier principle
GPS信号记录仪按要求安装在试验车内,GPS天线置于外侧车顶接收信号.试验车行驶经过L1和L3的激光光束时,激光光束被触发,同时触发闪光灯F1和F2分别在60°以上发射角的区域闪光工作.F1和F2发出的闪光先后被试验车侧面安装的硅光电池传感器接收.该传感器输出对应的电信号脉冲至GPS信号记录仪,记录仪随后记录下GPS卫星信号在该测试区域始末位置对应的相关信息.将试验车通过测试区域时记录下的GPS卫星信号作为所需标定的试验对象,存储在计算机的硬盘上.以L1和L2之间的速度V1,L2和L3之间的速度V2对速度参考值的测量准确性进行评估.当V1与V2之差小于0.1km/h时,以L1和L3间的平均速度V3为参考速度值给测试区域内的卫星GPS信号定标;否则重复该次试验直到满足前述要求.将完成定标的测试区域内卫星GPS信号在实验室进行多次回放,对被校测速仪的示值重复性进行评估.
被校高精度机动车GPS测速仪(型号Racelogic VBOX III,出厂编号031183,刷新率100Hz)的校准速度范围为(40~180)km/h.选择带巡航定速的试验车,将高精度机动车GPS测速仪及GPS信号记录仪安装在车内,GPS接收天线置于试验车外侧顶部.选择平坦、干燥,直线距离大于2km,宽度大于10 m的试验道路进行试验.
在道路试验的测量速度范围,选择的预期试验速度点分别为:40,60,80,100,120,140,160,180,单位为km/h.选择L1和L3间的平均速度值作为参考速度值,即道路试验的参考速度值.高精度机动车GPS测速仪的道路试验结果和回放试验结果都是其测试区域内多个速度示值的平均值,平均值与参考速度值的相对偏差标于柱状图上方,如图4所示.
单台高精度机动车GPS测速仪道路试验及卫星信号回放试验结果与参考速度值之间的相对偏差都在±0.1%范围内.高精度机动车GPS测速仪道路试验的平均速度值是由测速仪本身的GPS天线接收信号及随后记录在存储卡的测量结果直接求出的;卫星信号回放试验结果的速度平均值是根据GPS记录仪记录的标定信号,在实验室进行回放求得.道路试验和回放试验的结果相互独立.
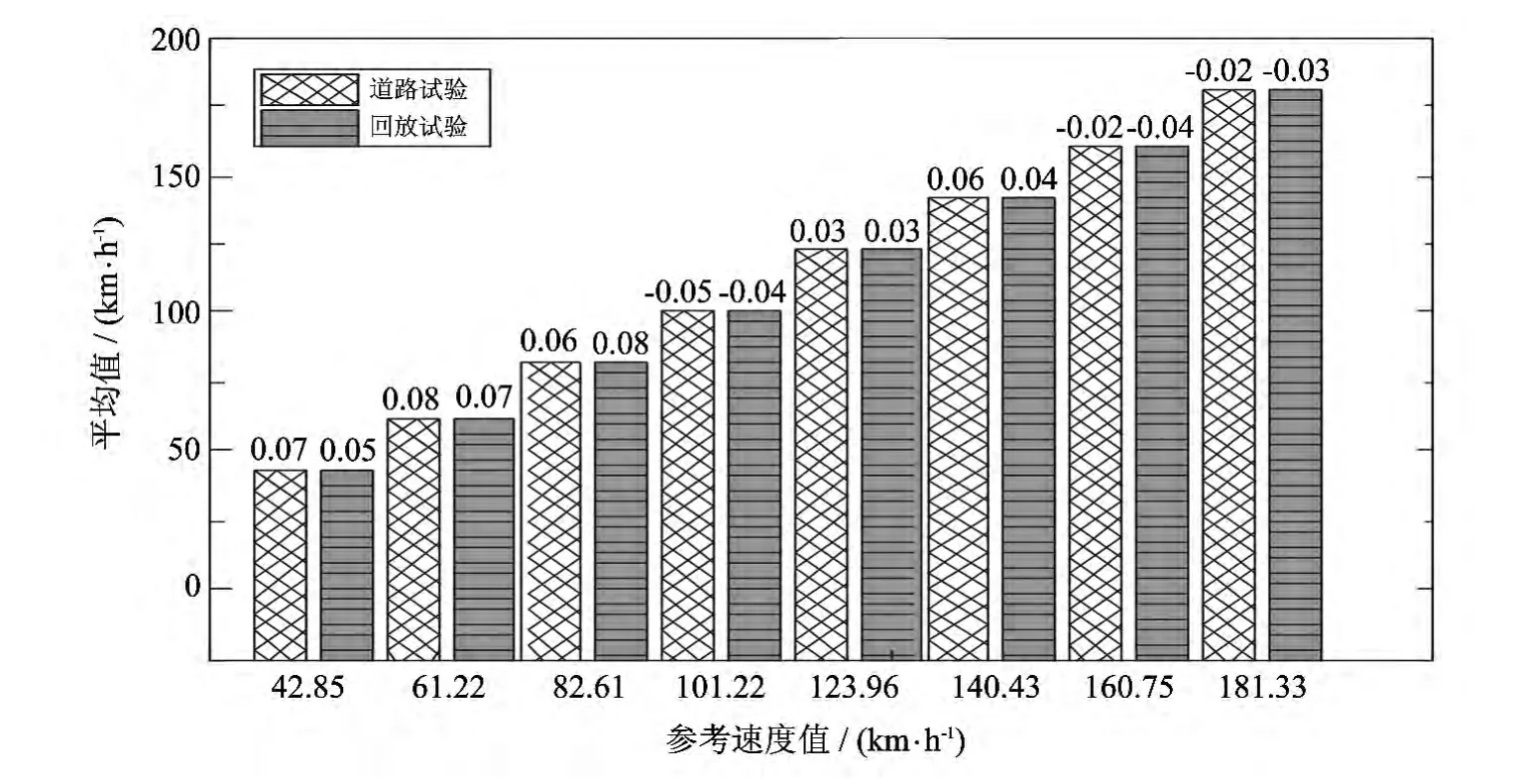
图4 高精度机动车GPS测速仪的道路试验及回放试验结果Fig.4 In-field and replay experiments results of high accuracy GPS vehicle speed meter
3.2 GPS回放测速误差不确定度分析
高精度机动车GPS测速仪的校准链由三光束光遮挡测速标准装置、GPS信号记录/回放仪和高精度机动车GPS测速仪组成.理论上,该校准链中的所有组成部分引入的误差源,均会对校准不确定度产生影响,见图5.
利用GPS信号进行速度测量,接收机收到的卫星信号受到多种误差源的影响,包括卫星时钟误差、星历误差、相对论效应、地球自转影响、电波折射误差、多路径误差、接收机噪声和通道偏差等.
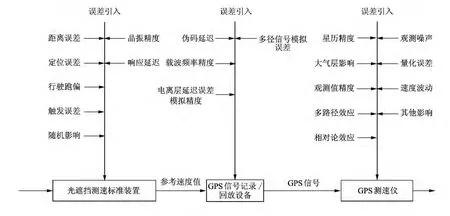
图5 高精度机动车GPS测速仪校准误差源分析Fig.5 Calibration error source analysis of high accuracy GPS vehicle speed meter
本文中对高精度机动车GPS测速仪速度示值误差的数学模型进行了简化,建立的误差模型为

式中:v表示测速仪的速度示值;s为测试区域的长度;t为试验车通过测试区域所用时间.方差可以表示为

对于光遮挡测速方法,同样数值大小的距离误差或时间误差对速度示值误差的影响随速度升高而增大.本文以参考速度值181.36km/h作为极端测量情况,进行不确定度评定.按照输入量的不确定度来源及评定,列出输出量的标准不确定度分量,见表3.
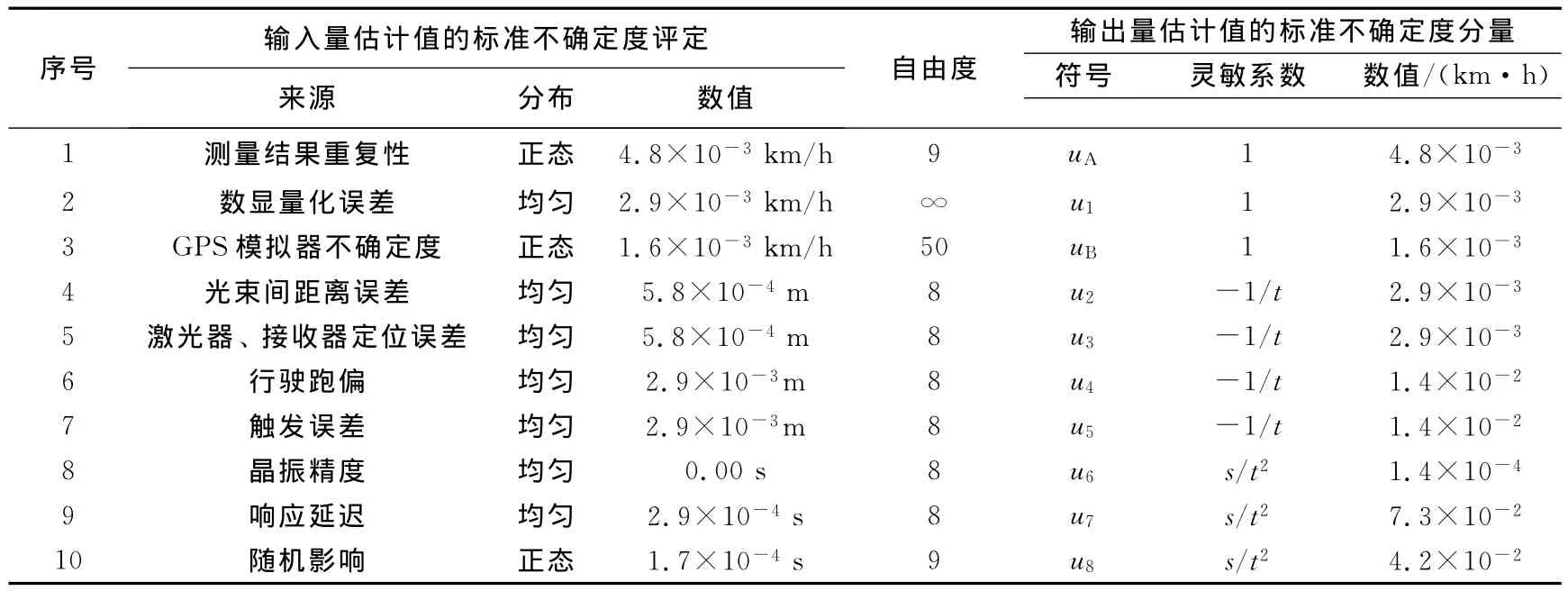
表3 回放测速误差不确定度分量表Tab.3 Uncertainty budget of replay calibration error
由于各标准不确定度分量相互无关,故合成标准不确定度为

合成相对标准不确定度为0.05%,故相对扩展不确定度为0.10%,k=2.
4 结束语
本文对同一台高精度机动车GPS测速分别进行了模拟测速误差校准和卫星信号回放测速误差校准试验,并进行了不确定度分析,得出以下结论:
1)使用GPS信号模拟器与卫星场信号器组成的GPS模拟测速误差校准装置,对高精度机动车GPS测速仪进行模拟测速误差校准.结果显示该装置对高精度机动车GPS测速仪在(40~180)km/h范围内的模拟速度测量误差校准不确定度优于0.02%(k=2).
2)在实验室完成高精度机动车GPS测速仪在(40~180)km/h时速范围内卫星信号回放测速误差校准,速度示值误差校准不确定度优于0.10%(k=2);
3)高精度机动车GPS测速仪用作移动式现场标准测速仪[13]时,上述两种校准方法不确定度均不大于其最大允许误差绝对值的1/3[14],能够作为GPS标准测速仪量值溯源的有效途径.其中,模拟测速误差校准法能够在实验室完成高精度机动车GPS测速仪测速范围和模拟测速误差等关键计量指标的校准项目,避免了繁琐危险的现场实车高速试验,科学合理,可操作性强,并且不确定度优于回放测速误差校准.GPS测速仪模拟校准装置可以溯源至频率基准.而卫星信号回放测速误差校准方法不确定度较高的原因在于引入的不确定度分量更多,其回放的校准场景更接近被校器具的真实使用场景.回放测速误差校准方法可以溯源至时间和长度基准,溯源途径简单明确.两种方法均可以对高精度机动车GPS测速仪进行有效校准,计量机构可以根据需要选择合适的校准方法.经过校准的高精度机动车GPS测速仪在可用卫星数达到6颗以上时可作为机动车测速标准器具使用,具有较大的推广应用前景.
[1] 赵军,刘美生,杨春生,等.基于 GPS技术的速度标准装置研究[J].微计算机信息,2008,24(25):245-246.
Zhao Jun,Liu Meisheng,Yang Chunsheng,et al.Research on standard equipment 0fspeed based on GPS technology[J].Control & Automation,2008,24(25):245-246.(in Chinese)
[2] 张宝峰,耿丽红.GPS单点测速误差分析与数据处理[J].天津理工大学学报,2010,26(003):13-15.
Zhang Baofeng,Geng Lihong.Error analysis and data processing of GPS single-point velocity determination[J].Journal of Tianjin University of Technology,2010,26(003):13-15.(in Chinese)
[3] 戚淑芬,李明,李利洁,等.嵌入式GPS数据采集系统的设计与实现[J].仪器仪表学报,2006,27(1):127-129.
Qi Shufen,Li Ming,Li Lijie,et al.Design and realization of GPS data acquisition system based on embedded system[J].Chinese Journal of Scientific Instrument,2006,27(1):127-129.(in Chinese)
[4] 赵军祥,张其善,常青,等.高动态GPS卫星信号模拟器关键技术分析及应用[J].电讯技术,2003,43(4):49-54.
Zhao Junxiang,Zhang Qishan,Chang Qing,et al.The key technique analysis and applications of high dynamic GPS signal simulator[J].Telecommunication Engineering,2003,43(4):49-54.(in Chinese)
[5] 冯富元.GPS信号模拟源及测试技术研究和实现[D].北京:北京邮电大学,2008.
[6] 刘洁,廉保旺,李智君.卫星信号模拟器中多普勒频移模拟的研究[J].信息安全与通信保密,2008(1):52-54.
Liu Jie,Lian Baowang,Li Zhijun.Research on of simulation doppler frequency-shift in satellite signal simulator[J].Information Security and Communication Privacy,2008(1):52-54.(in Chinese)
[7] Guidance for test houses on the use of satellite speed measurement equipment for Home Office type approval tests[R].UK:Summers D,Lewis S,HOSDB,2006.
[8] Federal Office of Metrology METAS.Certificate of calibration No.258-14815[Z].Switzerland:3003Bern-Wabern,27.September,2011.
[9] Racelogic Corporation.A Comparison of non-contact speed sensors[EB/OL].2013-07-04[2014-07-01].http:∥www.racelogic.co.uk/_downloads/vbox/Application_Notes/Comparison%20of%20Non-contact%20Speed%20Sensors.pdf.
[10] 陈海咏,金雷鸣.GPS信号仿真器校准方法[J].上海计量测试,2011,224(4):13-15.
Chen Haiyong,Jin Leiming.The calibration method of GPS signal simulator[J].Shanghai Measurement and Testing,2011,224(4):13-15.(in Chinese)
[11] 叶芳.基于GPS技术的车速传感器的研制与应用[D].重庆:重庆大学,2009.
[12] 孙桥,蔡常青,张跃,等.基于多普勒频移观测值的机动车GPS测速仪校准技术的研究[J].计量学报,2010,31(5):456-459.
Sun Qiao,Cai Changqing,Zhang Yue,et al.Study on calibration technique for GPS vehicle speed-measuring device based on doppler frequency shift measurement[J].Acta Metrologica Sinica,2010,31(5):456-459.(in Chinese)
[13] JJG 528-2004.机动车雷达测速仪检定规程[S].
[14] JJF 1094-2002.测量仪器特性评定技术规范[S].