基于改进MRAS的无速度传感器矢量控制的转速估算研究
2015-01-28尚广利薛重德李肥翔
尚广利,薛重德,李肥翔
(南京航空航天大学 机电学院,江苏 南京 210016)
近年来,随着电力电子技术和计算机技术的发展,转速闭环控制的高性能交流调速系统迅速发展起来。传统的转速闭环控制都要在转轴上安装速度传感器,但是这种机械式的传感器增加了传动系统的价格、降低了系统的可靠性、破坏了异步电动机固有的坚固性和简单性[1]。因此,无速度传感器控制成为了现代交流传动控制技术的一个重要研究方向,而实现对电机转速的准确估算又是无速度传感器控制的一个重要基础。常见的无速度传感器转速辨识方法有直接计算方法[2]、Luenberger状态观测器方法[3]、扩展卡尔曼滤波(EKF)方法[4]、模型参考自适应(MRAS)方法[5-6]。本文基于异步电机的数学模型、模型参考自适应理论,论述了异步电机无速度传感器矢量控制的转速估算策略,取得了较好的实验效果。
1 异步电机的数学模型
异步电机是非线性、多变量、强耦合的,在两相静止坐标系α-β上的数学模型如下:1)α-β两相静止坐标系上的电压方程
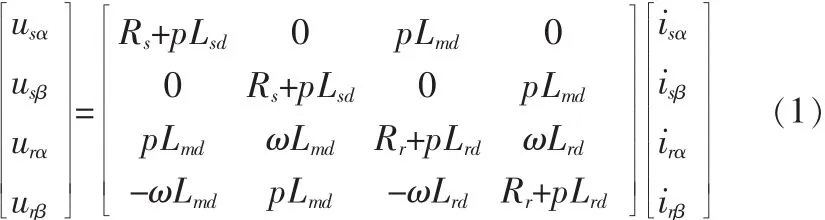
式中Lsd为定子一相绕组的等效自感,Lrd为转子一相绕组的等效自感,Lmd为定转子一相绕组的等效互感。
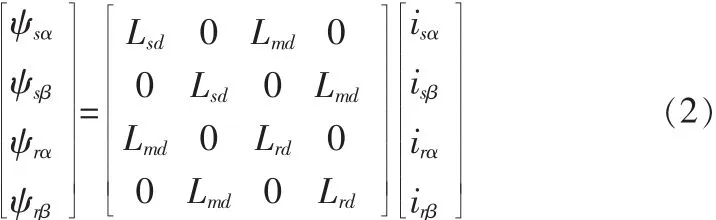
2)α-β两相静止坐标系上的磁链方程
(3)α-β两相静止坐标系上的电磁转矩方程

2 模型参考自适应的基本原理
图1所示为模型参考自适应系统原理图,该系统有参考模型、自适应模型和自适应机构组成。参考模型的参考输出y(t)和可调模型的可调输出y^(t)具有相同的物理意义,将两个输出的误差e(t)送入自适应机构,通过自适应算法不断对可调模型参数进行更新,使得输出误差e(t)趋向于零,即输出参考和可调参考相等。
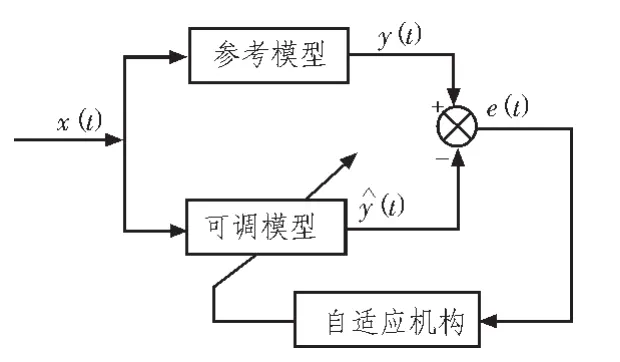
图1 模型参考自适应系统原理图Fig.1 Principle diagram of themodel reference adaptive system
模型参考自适应系统重要的理论依据是Popov超稳定理论,模型参考自适应系统的设计就是要使输出误差模型成为渐进超稳定的。
3 转速的估算
无速度传感器的速度推算是在检测电机定子电压、电流的基础上,通过电机数学模型和理论算法来推算电机的转速。文中所采用的是基于模型参考自适应的速度推算(MARS),该方法需要建立一个参考模型和一个自适应可调模型。通过异步电机的数学模型可得到电压模型和电流模型,其中电压模型(参考模型)是基于异步电机定子方程来计算转子磁链,即:

其中:σ 为漏磁系数,σ=1-L2md/LrdLsd。
式(4)中没有转速ω参数,我们将它作为参考模型。将式(4)离散化得:
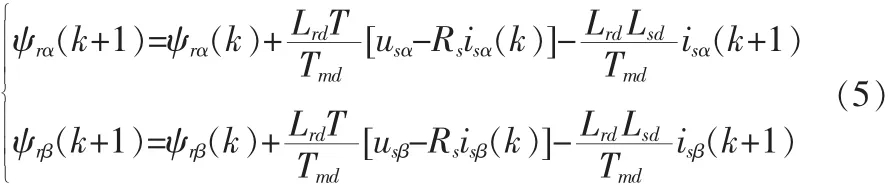
其中T代表采样周期。
电流模型(可调模型)如下:

其中表示转子时间常数。将式(6)离散化得:

式(5)和(7)中的电压和电流由实际测量并经坐标变换得到。在理想情况下,正确的转速估算信号将使得由参考模型和自适应模型计算得出的磁链相同,即 ψrα=ψ^rα,ψrβ=ψ^rβ。我们用下图2所示的PI自适应算法来调整误差ξ并获得转速ω^。
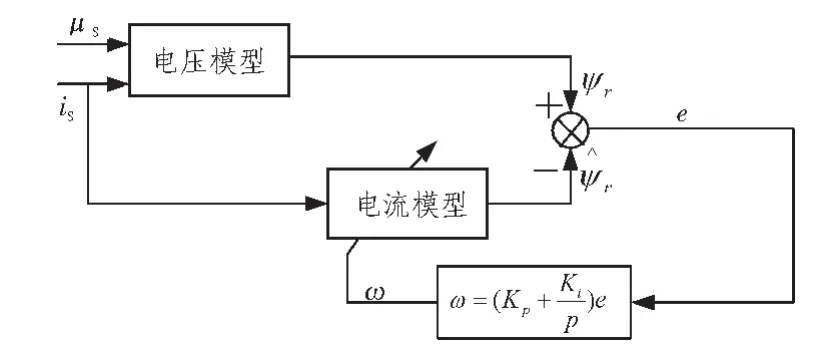
图2 转速自适应辨识系统原理图Fig.2 Principle diagram of adaptive speed identification system
在为系统设计自适应算法时,最重要的一点是要考虑整个系统的稳定性,并确保速度估计值能以令人满意的动态特性收敛到期望值。为了确保系统的全局稳定性,利用了Popov超稳定性法则,可导出如下转速估计关系式:

式中:

稳态时,对应的转子磁链相平衡,即 ψrα近似等于ψ^rα,ψrβ近似等于ψ^rβ。
在上述的基于转子磁链的模型参考自适应转速辨识算法中,是以转子磁链的电压模型作为参考模型的,该磁链观测器包含一个纯积分环节,积分运算无形中会导致误差的累积和直流漂移等问题。为了削弱积分漂移的影响,改善辨识性能,在参考模型中引入了滤波环节,但是滤波器同时带来了磁链估计的相移偏差,为了平衡这一偏差,在可调模型中引入相同的滤波环节[7],改进后的算法如图所示。
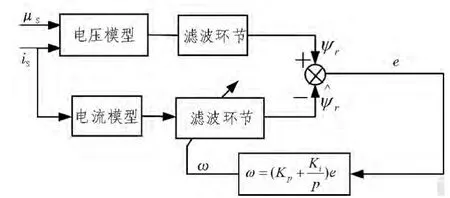
图3 改进后的转速自适应辨识系统原理图Fig.3 Principle diagram of the improved adaptive speed identification system
4 实验结果与分析
本实验所采用的控制核心为TMS320F2812型DSP,对象为鼠笼型三相交流异步电机,型号为JW5624,其额定数据如下:nN=1 450 r/min,UN=380 V,IN=0.3 A,PN=120W,fN=50 Hz,极对数2,实验采用的载波频率为5 kHz,采样、速度估算及速度控制时间间隔为0.4ms。
基于本文所提出的估算策略,分别做了异步电机的启动、降速、升速、正反转突变四种情况下的实验。必须指出的是,式(4)和(6)均是积分方程,要获得良好的结果,首要解决的问题是消除积分误差。
下面给出3种不同情况下的估算及实测转速图,其中实测转速通过旋转编码器得到。图中纵坐标单位为r/min,横坐标单位为0.4ms。

图4 电机启动时实测转速曲线Fig.4 Curve ofmeasured speed when themotor starts
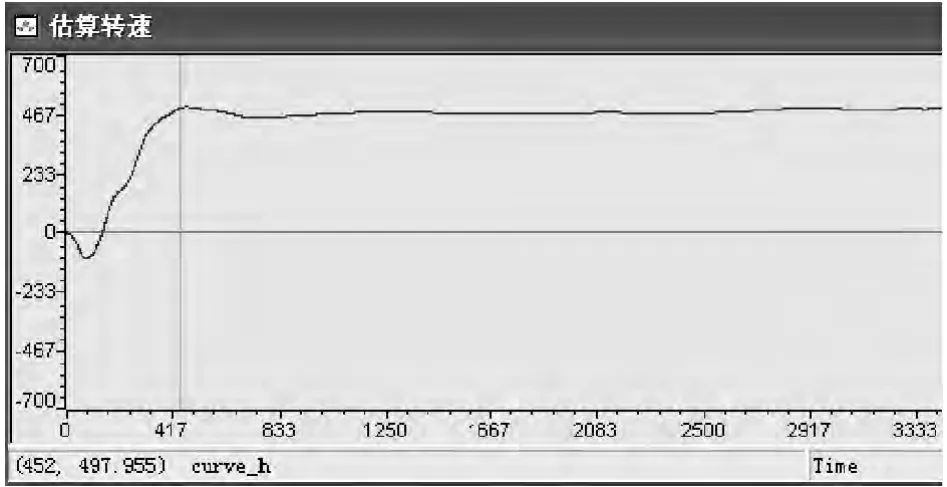
图5 电机启动时估算转速曲线Fig.5 Curve of estimated speed when themotor starts
图4 和图5是电机启动时的情况,我们设定的转速值为500 r/min,通过这两幅图的比较可以看出,在电机刚启动时,估算转速有一个反方向的小波动,但是很快估算转速正方向并逐渐达到设定转速,从启动到稳定所需的时间比较短,达到稳态后转速基本趋于稳定,从而我们可以看出估算转速满足启动要求。
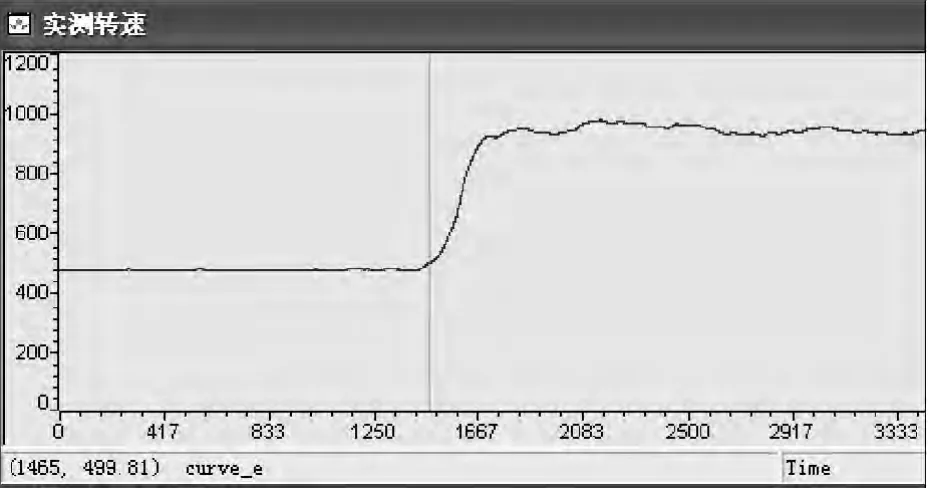
图6 电机升速时实测转速曲线Fig.6 Curve ofmeasured speed when themotor at raising speed
图6 和图7是电机转速从500 r/min突变到950 r/min的情况,从这两幅图可以看出,电机从低速变为高速时,实测转速和估算转速基本都能达到设定的值,并且当电机转速改变时,转速响应快,稳定后波动较小。
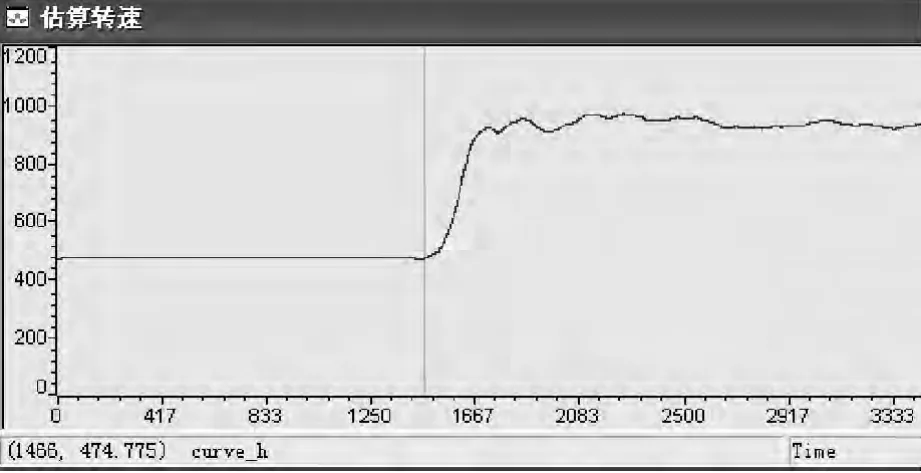
图7 电机降速时估算转速曲线Fig.7 Curve of estimated speed when themotor at raising speed

图8 电机正反转时实测转速曲线Fig.8 Curve ofmeasuredmotor speed at normal-reverse transfer
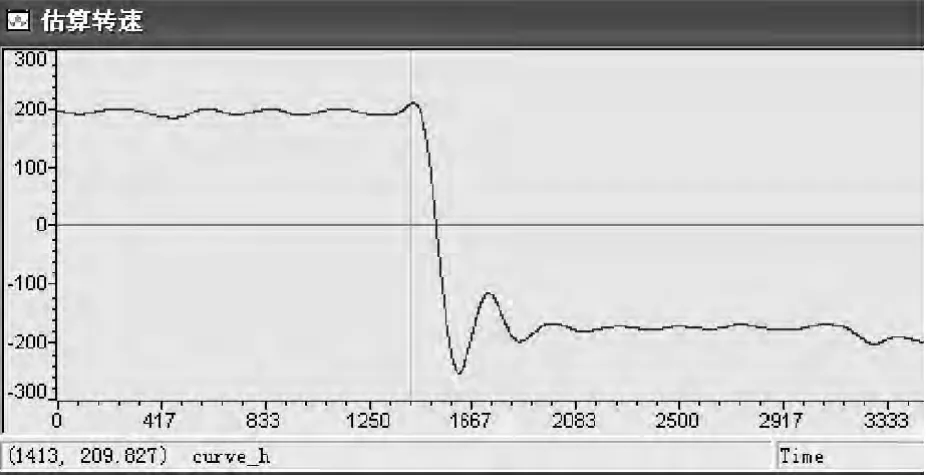
图9 电机正反转时估算转速曲线Fig.9 Curve of estimatedmotor speed at normal-reverse transfer
图8 和图9是电机转速从200 r/min突变到-200 r/min的情况,从实验结果可以看出,实测转速和估算转速基本上都达到了设定的值,并且动态响应快,其中估算转速在降到-200 r/min的那一刻有比较大的波动,但很快就趋于稳定,并且稳定后波动较小,因此电机正反转时转速的估算性能良好。
5 结 论
本文在分析传统的MRAS转速辨识方法的基础上,针对电压型转子磁链观测易受积分漂移的影响,造成转速辨识困难和结果不准确的问题,提出了改进MRAS的转速估算方法。从电机在启动、升速、正反转突变3种情况下的实验结果可以看出,估算转速和实际转速都非常的接近。特别要说明的是,本实验采用的是小功率电机,对应的定子电压和电流的值较小,其测量误差比大功率电机时要大,而估算算法是依据电压和电流来计算转速的,因此对大功率电机的速度估算会更精确一些。这说明基于改进MRAS的转速估算方法可以用于异步电机的无速度传感器矢量控制系统中。
[1]Akin B,Orguner U,Ersak A,et al.Simple derivative-free nonlinear state observer for sensorless ac drives[J].IEEE Mechatronics,2006,11(5):634-643.
[2]Vas P.Sensorless Vector and Direct Torque Control[M].New York:Oxford Univ.Press,1998.
[3]Hasan S,Husain I.ALuenberger-sliding mode observer for online parameter estimation and adaptation in highperformance induction motor drives[J].IEEE Appl,2009,45(2):772-781.
[4]Barut M,Bogosyan S,Gokasan M.Speed-sensorless estimation for induction motors using extended Kalman filters[J].IEEE Electron,2007,54(1):272-280.
[5]Cirrincione M,PuccM i,Cirrincione G,et al.Anew TLS-based MRAS speed estimation with adaptive integration for high-performance inductionmachine drives[J].IEEE Appl,2004,40(4):1116-1137.
[6]Maiti S,Chakraborty C,Hori Y,et al.Model reference adaptive controller-based rotor resistance and speed estimation techniques for vector controlled induction motor drive utilizing reactive power[J].IEEE Electron,2008,55(2):594-601.
[7]Tajima H,Hori Y.Speed sensorless field-orientation control of the induction machine[J].IEEE Trans.IA,1993,29(1):175-180.
