拉格朗日导航系统评估技术研究及测试平台实现
2015-01-28叶丽莎朱程广
叶丽莎,朱程广
(上海交通大学 上海 200240)
拉格朗日卫星导航系统是基于天体拉格朗日点的卫星导航系统,本文的拉格朗日点是指地月系拉格朗日点,其卫星主要分布于地月系L1、L2、L4和L5的卫星轨道上,目的是对地月系和火星区域的空间探测器进行导航定位。导航系统的建设和测试评估总是齐头并进的。一方面,测试评估可以验证系统的功能和性能是否达到设计的预期要求;另一方面可以对系统的工作状态进行监测,为系统后续发展提供改善或增强系统性能的依据[1]。拉格朗日导航系统目前正处于设计阶段,尚无系统化的评估体系可直接用于验证该导航系统能否满足导航定位的精度需求。
由于拉格朗日导航系统与GNSS系统都是卫星导航系统,所以有不少可以借鉴的地方,但有几个不同点需要特别注意:第一,系统信号覆盖范围大;第二,定位解算GDOP因子差别大;第三,导航卫星时钟同步较难;第四,导航卫星控制精度不高。所以,本文就该导航系统的特点,将整个测试评估体系分为系统层面和信号层面,针对几个重要性能指标的评估技术进行研究,设计测试评估体系架构,并通过测试平台的搭建和具体模块的实现,利用计算机仿真技术对拉格朗日导航系统进行仿真实验。
1 拉格朗日导航系统测试评估技术
拉格朗日导航系统测试评估技术主要解决导航系统星座配置、导航信号体制对导航性能的影响,以及信号接收、导航定位解算等的评估。根据评估指标的属性,把整个评估体系分为导航系统层面和信号处理层面两个部分。
1.1 系统级测试评估技术
拉格朗日导航系统的评估与GNSS的不同,因为尚处于设计阶段,而且要满足地月系及火星区域内探测器的深空导航要求,因此要先考察该导航系统能否宏观上满足深空导航的要求。文中主要使用网格法,对空间区域进行网格化分割,通过设定性能指标,对系统的导航性能及远近效应等进行评估。
1)导航性能评估
对地月系区域(或火星区域)进行网格化,形成在地心惯性系下的坐标。针对每个网格点Xpj,若假设m颗导航站位置为Xi,则m颗卫星相对网格点的单位矢量为:

有测量矩阵:

令
Aj=HTHjj
对角化有,

式中,U,V 为正交矩阵,D=diag[λi],i=1,2, …,m 且 λ1>λ2>…λm。
则评估点性能指标:

统计 Jj,把 Jj分成几个等级,如<10、<100等等。若Jj较大的区域多,则系统性能较差。
由于深空中轨道运行较为光滑,因此,在评估中可以考虑动力学特性,如若状态转移矩阵为:

考虑一段时间Δt,则有,

同样,对角化有,

式中,U,V 为正交矩阵,D=diag[λi],i=1,2,…,m,且 λ1>λ2>…λm。
则评估点性能指标:

这样,系统性能评估更加准确,其性能有大幅度提高。
2)远近效应评估
拉格朗日导航系统信号远近效应的评估方法,同样针对每个网格点,若假设m颗导航站位置为Xi,则m颗卫星相对网格点距离为:

计算信号传播衰减:
统计远近效应<20 dB、<40 dB、<60 dB…区域,若远近效应较大,则系统性能不佳。
根据测距码体制计算增益,设为B,
其中,Rτ,Rr分别为自相关与相相关。
判断B+Ld<0
把B+Ld<0区域统计,若区域较大,则系统性能较差。
1.2 信号级测试评估技术
导航信号质量的好坏,直接关系到卫星导航系统的整体性能。信号质量评估可以为卫星导航系统的信号设计及关键技术在轨试验验证提供手段及支撑[2],对于优化卫星导航系统性能起着重要的作用。在公开发表的文献及学位论文中,主要讨论民用信号的性能[3-4],且主要集中于精度、抗多径和兼容性方面[5-6],以及抗干扰能力[7]。由于拉格朗日导航系统的卫星和接收机都分布在太空,与一般的GNSS不同,故多径误差,抗干扰和兼容性等方面要求并非本文讨论的重点。因此,针对拉格朗日导航系统的特点,本文主要针对信号衰减、远近效应抑制性能、功率谱分析以及导航定位精度等对导航信号的性能进行评估。
1)信号衰减
空间导航信号的正确与否及性能优劣,直接关系到系统PVT基本功能、关键性能和指标的实现[8]。由于需要对地月系及火星区域进行导航定位,卫星信号传播距离较远,信号强度衰减较大,会对信号的误码率与测距正确率产生较大的影响,因此要对信号衰减程度进行评估。本文主要根据Friis公式计算得到接收信号强度指示值。
2)远近效应抑制性能
这里主要从信号体制角度评估导航系统的远近效应抑制性能。根据测距信号的发射体制,以及测距码的自相关与互相关比值,确定测距信号抑制互相关干扰大小Gd;根据地月系导航系统的布局以及信号发射参数计算测试点的远近效应大小Gy,判断是否有:

3)功率谱分析
利用Welch法对拉格朗日导航系统信号进行谱分析,采用信号分段重叠、加窗、FFT等技术来计算功率谱。由于导航系统的性能好坏在一定程度上取决于测距码的相关函数,其相关函数旁瓣的峰值最大值可以来表示系统最坏情况下的性能。
4)定位精度计算
采用卡尔曼滤波算法对卫星信号进行定位解算。卡尔曼滤波是解决以均方差最小为准则的最佳线性滤波问题,根据前一个估计值和最近一个观察数据来估计信号的当前值。用状态方程和递推方法进行估计,不需要知道全部过去的数据。
2 拉格朗日导航系统测试平台设计
拉格朗日导航测试平台主要分为导航系统配置与显示、导航系统评估、信号模拟器和信号接收测试等模,并通过局域网联接各模块,根据实际需要,合理选用TCP和UDP两种协议实现模块间的通讯。其总体架构如图1所示。
2.1 系统层面性能评估
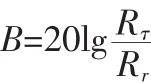
系统层面的评估主要是针对拉格朗日导航系统的不同轨道、星座配置、导航系统精度性能、以及导航信号的远近效应等进行评估。其结构如图2所示。
2.2 信号层面的测试评估
拉格朗日导航系统的卫星信号处理过程与一般的GNSS导航系统相似,卫星信号经空间传播后被接收机天线接收,然后通过射频前端滤波放大、下变频、采样及量化处理后,转换为数字中频信号进行后续的信号处理过程。文中所使用的卫星仿真信号为数字中频信号,为了能更加真实地模拟深空中的卫星信号,在生成信号的过程中,不仅考虑了信号频率、时延、衰减等因素,加之拉格朗日导航系统中卫星和探测器有相对运动且速度较快,故还添加了多普勒频移。信号模拟器主要包括卫星轨道和空间探测器轨道的绘制,参数设置,信号生成等功能模块。其结构流程如图3所示。

图1 拉格朗日导航测试平台体系架构图Fig.1 Structure diagram of Lagrange satellite navigation evaluation platform
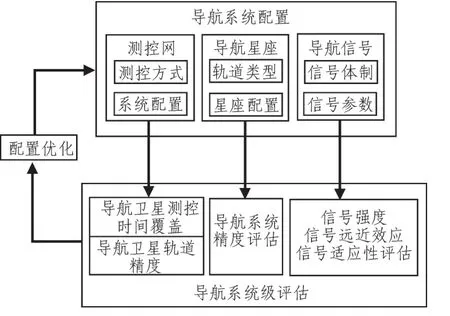
图2 拉格朗日导航系统级评估结构图Fig.2 Structure diagram of lagrange satellite navigation evaluation system

图3 拉格朗日导航系统信号模拟器Fig.3 Signal simulator of Lagrange satellite navigation system
信号模拟器产生数字中频信号后,就可以利用信号接收测试平台,对信号进行接收性能测试。对于信号接收性能测试而言,主要测试拉格朗日导航信号的捕获、跟踪、以及解调等影响导航精度方面性能。
信号接收层面的测试主要考虑导航信号接收性能测试(包括信号捕获、跟踪性能等),以及信号测量方面性能测试(主要测试一定导航信号体制下的伪距、伪距率的测量性能),其结构图如图4所示。
信号测试平台的作用有两个:
第一,测试拉格朗日导航系统的信号性能。在测试平台上集成一定的算法库,调用这些算法来对导航信号的不同性能指标进行评估。同时检测拉格朗日导航系统的导航模式是否有效,能否满足导航精度需求。因此,设置控制/调度模块可以对信号的参数进行调整。

图4 信号接收测试平台Fig.4 Signal reception test platform
第二,测试拉格朗日导航接收模块性能。通过测试拉格朗日导航信号接收算法,为下一阶段的导航接收机研制提供检测平台。
3 测试平台的实现与仿真结果
3.1 主控界面
主控制界面的功能主要包括:主机信息显示:用户名、IP地址、UTC时间;菜单栏,包括文件、视图、编辑和帮助菜单;终端列表;参数设置;参数传输;终端间互相通信。
图5 主控制界面Fig.5 The interface ofmain control
主控界面可针对不同的终端,发送不同的参数,主要包括卫星轨道参数、卫星信号体制参数和总体性能评估显示参数等。
3.2 轨道生成及绘制模块
轨道生成及绘制模块的功能是根据已有的轨道方程,输入初始和结束时间,生成并绘制出地月系(或火星附近)探测器的轨道、拉格朗日导航系统卫星的轨道以及地球高轨卫星的轨道。
这里用了几种不同的算法进行轨道生成,并通过对轨道的起始点和终点的偏差计算,最终选取最优的算法进行轨道生成。
3.3 模拟信号产生模块

图6 轨道生成与绘制模块Fig.6 Track generation and renderingmodule
根据已有的卫星轨道以及卫星参数,对伪距,导航电文等进行信号调制,将生成的模拟信号发送给测试平台。此外,该模块还可将模拟信号状态及信号同步信息反馈到主控模块。模拟信号是由载波和导航电文调制获得的,信号的格式为信号前8位为卫星编号,尾部16位为校验位,用来检测数据是否正确。在产生模拟信号的时候,可以设置不同的码速率和不同的多普勒频偏。
3.4 测试评估模块
产生的模拟信号,在评估终端接收到后,经过参数设置和评估后,经评估结果发送给显示终端。结果显示的实时性和准确性对评估系统的可靠性具有重要意义。评估显示分为系统级导航性能评估、测试级导航性能评估、导航终端算法评估和导航卫星测控性能评估等模块。
对导航系统及模拟信号进行性能评估,以图表形式实时显示评估结果,并可实时显示系统的工作内容及步骤,让用户更直观地了解系统的工作状态。
对于相同的火星探测器轨道,不同星座构型下信号衰减仿真结果,以构型Halo-VP-VP为例:
对于信号的功率谱分析,当码长为255,码速率为1.023*10^6,不添加多普勒频偏的评估结果如图8所示。
最后,通过卡尔曼滤波算法对卫星模拟信号的定位解算,得到当加入偏差为100 m时,在地月系区域内的导航位置与速度精度分别在100m、0.5 m/s以内;在火星附近区域位置误差<3 km的导航精度,达到拉格朗日导航系统的初步设计要求。
4 结 论
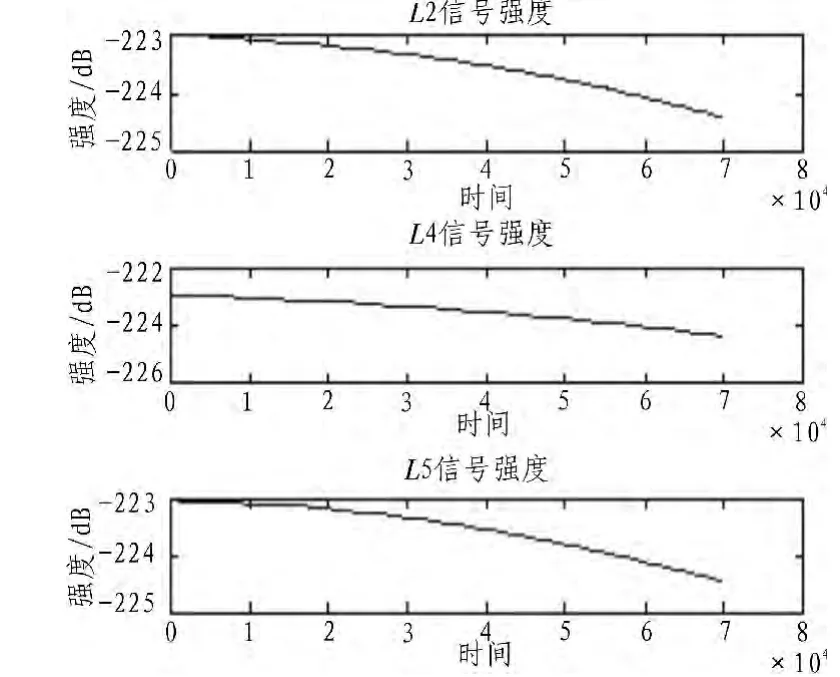
图7 Halo-VP-VP卫星信号衰减仿真Fig.7 The navigation signal attenuation simulation of Halo-VP-VP

图8 卫星信号功率谱分析Fig.8 The navigation signal power spectrum analysis
根据拉格朗日导航系统的特点,在对拉格朗日导航系统卫星信号进行分析和建模的基础上,提出了主要的测试性能指标与评估技术,基于matlab和C++设计了导航系统性能评估测试平台,并给出了测试平台的架构和实现流程图。通过生成不同的数字中频信号进行仿真实验,结果表明该测试平台可以实现对导航系统及卫星信号的测试评估,并达到了系统设计的要求,为以后的接收机搭建和试验卫星验证提供参考依据。
[1]胡志刚.北斗卫星导航系统性能评估理论与试验验证[D].武汉:武汉大学大地测量学与测量工程,2013.
[2]石慧慧,卢晓春,饶永南.GNSS信号稳定性评估方法研究[J].时间频率学,2013,36(2):97-105.SHI Hui-hui,LU Xiao-chun,RAO Yong-nan.Methods of evaluation for GNSS signal stability[J].Journal of Time and Frequency,2013,36(2):97-105.
[3]Hein G W,Avila-Rodriguez J A,Wallner S,et al.MBOC:The new optimized spreading modulation recommended for GALILEO L1 OS and GPS L1C.In:Proceedings of IEEE/ION PLANS 2006.Virginia:Institute of Navigation,2006:883-892.
[4]Avila-Rodriguez J A,Hein G W,Wallner S,et al.The MBOCmodulation:The final touch to the Galileo frequency and signal plan[D].ION GNSS 20th International technical Meeting of the Satellite Division.Virginia:Institute of Navigation,2007:1516-1529.
[5]Wallner S,Hein G W,Avila-Rodriguez J A.Interference computations between several GNSS systems[M].Proceedings of ESA Navitec 2006.Noordwijk:The Netherlads,2006.
[6]Wallner S,Hein G W,Pany T,et al.Interference computations between GPS and GALILEO.In:ION GNSS 18th International Technical Meeting of the Satellite Division[D].Virginia:Institute of Navigation,2005.
[7]唐祖平,周鸿伟,胡修林.Compass导航信号性能评估研究[J].中国科学:物理学力学天文学,2010,40(5):592-602.TANG Zu-ping,ZHOU Hong-wei,HU Xiu-lin.Research on performance evaluation of Compass signal[J].Scientia Sinica Phys, Mech&Astron,2010,40(5):592-602.
[8]贺成艳.GNSS空间信号质量评估方法研究及测距性能影响分析[D].北京:中国科学院大学天体测量与天体力学,2013.
