虚拟陀螺改进卡尔曼滤波设计
2015-01-28吕琦炜鲍其莲
吕琦炜,鲍其莲
(上海交通大学 仪器科学与工程系,上海200240)
基于MEMS技术的微机械陀螺具有广阔的应用前景,但因其精度普遍偏低,从而限制其应用,因此提高MEMS陀螺精度非常关键[1]。将多个微陀螺集成在同一个硅片上构成陀螺阵列,利用这些陀螺之间存在的相关性,通过软件滤波算法使阵列中各个陀螺互相进行误差补偿,得到最佳估计值,可有效降低陀螺的漂移误差。将该陀螺阵列视作一个虚拟陀螺,其精度相比原单个陀螺可获得显著的提高。
文中提出一种改进的卡尔曼滤波算法,将其应用于陀螺阵列与虚拟陀螺输出估计中,通过多个微陀螺的信息融合有效降低了虚拟陀螺输出随机漂移误差,提高了虚拟陀螺的精度。
1 误差模型及卡尔曼滤波算法简介
本文讨论的虚拟陀螺系统方案如图1所示。
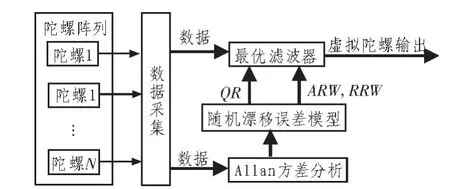
图1 虚拟陀螺系统结构图Fig.1 Structure of virtual gyroscope system
对陀螺阵列的各陀螺建立其随机误差模型如下:

其中yi表示陀螺的实际输出;nai表示角速率随机白噪声,方差为Qai。ω表示真实角速率;bi表示角速率随机游走噪声,其激励为方差为Qbi的白噪声nbi。Qa为角度随机游走噪声矢量na的协方差阵,Qb为速率随机游走噪声矢量nb的协方差阵。
将b和ω列为状态,可得到系统状态矢量X=[bω]T,角度随机游走nai作为量测噪声矢量,将陀螺阵列实际输出矢量作为y系统量测矢量。由此建立虚拟陀螺的系统状态方程和量测方程如下:

其中,w(t),V(t)为相互独立白噪声,方差分别为 q,r。

Qa为角度随机游走噪声矢量na的协方差阵,Qb为速率随机游走噪声矢量nb的协方差阵。
将其离散化,得到离散型系统状态方程和量测方程如下:

其中,
T为离散化周期,Wk为系统驱动白噪声序列,Vk为量测噪声序列。且Wk与Vk相互独立。则:
在实际虚拟陀螺设计时,通过统计其相关性、推导其相关函数,测量其相关时间,进而得到陀螺间的相关系数。通常单陀螺滤波算法中Q、R值的选取由Allan随机误差建模法[4-5]决定。对于多陀螺系统,Q、R的选取无法确定。
本文提出一种改进的Q、R值选取方法,如下式所示:
其中:qω为真实角ω速率建模的白噪声。
微机械陀螺在设计、加工、检测等方面都存在一致性,陀螺之间存在相关性[1]。引入相关性系数ρ来表征陀螺之间的相关程度:
ρ=0表示两个陀螺完全不相关;
ρ=±1表示两个陀螺最大正(负)相关;
-1<ρ<1且ρ≠0表示两陀螺之间存在一定的相关性。
虚拟陀螺的重要特点即为陀螺阵列中各个陀螺之间存在的相关性。如式(12)和式(13)所示。
其中:qω为真实角ω速率建模的白噪声。
在实际虚拟陀螺设计时,通过统计其相关性、推导其相关函数,测量其相关时间,进而得到陀螺间的相关系数。
2 仿真结果
本文首先仿真多陀螺输出数据,采样时间为120 s,采样频率为100 Hz,假设多陀螺具有类似特性,其误差随机分布在某一均值附近。例如随机常值误差为100°±20°/h,一阶马尔科夫过程为 70°±20°/h,白噪声为 45°±20°/h。 图 2 为单陀螺单轴的测量真值、测量输出与测量误差曲线。
对以上的仿真陀螺仪输出,进行卡尔曼滤波。进一步,采用多陀螺构成虚拟陀螺,其中取ρ=0.5,按照前文介绍的卡尔曼滤波算法,将多陀螺的输出进行融合。图3为6陀螺构成的虚拟陀螺单轴估计误差与单陀螺估计误差的对比图,可以看出,测量误差大为减小,经计算,其残差方差减小了85%左右。

图2 单陀螺单轴测量真值、实际测量输出及测量误差Fig.2 Measurement and measurement error of single gyroscope
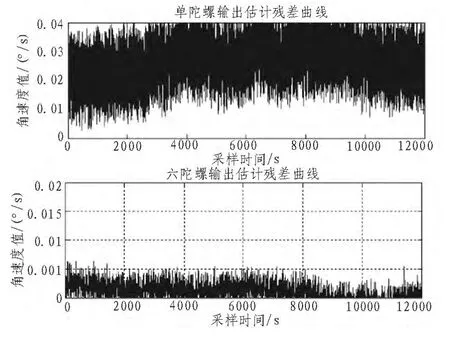
图3 单陀螺与虚拟陀螺估计残差比较Fig.3 Comparison of estimation errors of single gyroscope and virtual gyroscope
3 结 论
文中针对基于多个MEMS陀螺构成虚拟陀螺进行研究。利用MEMS陀螺间误差特性具有一定的相似性,构造基于多陀螺阵列的虚拟陀螺并建立虚拟陀螺的误差模型,提出一种方差估计方法并推导相应的卡尔曼滤波算法;仿真实验验证,多陀螺构成的虚拟陀螺输出估计精度获得较大提高,其输出估计残差与单陀螺相比可减小80%以上。

图8 相对位置误差曲线Fig.8 The relative position error curve
5 结 论
文中实现了无人直升机对移动目标的跟踪,从整体方案设计到具体实现给出了较为详细的过程。从实验结果可以看出,基于计算机视觉引导的方法可以很好地应用到小型无人直升机移动目标跟踪,并且充分验证了整个系统的可行性和鲁棒性。文中提出的基于视觉引导方式对小型无人直升机移动目标跟踪的实现提供了一种有效的解决方案,并且为下一步实现无人直升机移动平台降落打下基础。
[1]乌兰巴根,胡继忠,徐元铭.无人直升机在移动目标上的自主降落[J].计算机工程与应用,2010,46(23):227-230.WULAN Ba-gen,HU Ji-zhong,XU Yuan-ming.Autonomous helicopter landing onmoving target[J].Computer Engineering and Applications,2010,46(23):227-230.
[2]范才智,刘云辉,吴亮,等.无人直升机基于视觉的静止点目标跟踪[J].计算机应用研究,2009,29(2):492-495.FAN Cai-zhi,LIU Yun-hui,WU Liang,etal.Vision-basedstatic point target tracking of unmanned helicopter[J].Application Research of Computers,2009,29(2):492-495.
[3]刁灿,王英勋,王金提,等.无人机自动着陆中的机器视觉辅助技术[J].航空学报,2008(29):79-84.DIAO Can,WANG Ying-xun,WANG Jinti,et al.Computer vision assisted autonomous landing of UAV[J].Journal of Aeronantics,2008(29):79-84.
[4]Jonathan Courbon,Youcef Mezouar,Nicolas Gue'nard,Philippe Martinet,Vision-based navigation of unmanned aerial vehicles[J].Control Engineering Practice.,2010(18):789-799.
[5]Laurent Muratet,Stephane Doncieux,Yves Briere,et al.Acontribution to vision-based autonomous helicopter flight in urban environments[J].Robotics and Autonomous Systems,2005(50):195-209.
[6]刘继承,孙慧琳,赵洪涛.基于多特征融合的 Camshift结合 Kalman预测的实时性视觉跟踪算法研究[J].计算机应用,2014,33(5):54-57.LIU Ji-cheng,SUN Hui-lin,ZHAO Hong-tao.CamShift based on Multi-Feature fusion combines kalman prediction algorithm for real-Time visual Tracking[J].Computer Applications,2014,33(5):54-57.
[7]Courbon J,Mezouar Y,Martinet P.Autonomous navigation of vehicles from Avisualmemory using Ageneric cameramodel[J].IEEE Transactions on Intelligent Transportation Systems,2009,10(3):392-402.
[8]Ivain Fernando Mondragon,Pascual Campoy,Juan Fernando Correa,et al.Visual Model Feature Tracking For UAV Control[C].Conference:Intelligent Signal Processing,2007.
