高速梯的限速器研究与改进
2015-01-28惠林虎
惠林虎,王 义
(贵州师范大学 物理与电子科学学院,贵州 贵阳 550025)
1854年奥迪斯先生将电梯曳引绳砍断,电梯通过安全钳牢牢的固定在了导轨上,安全钳作为电梯的一道安全保护装置被确立下来。可以说,有了限速器和安全钳,电梯才被大众所接受[1]。机械式限速器正被市场广泛使用,但其存在以下缺点:一是动作速度不精确,只是在一定的速度范围内进行动作;二是动作速度容易随时间推移产生变化,需要定期检验,否则可能不能可靠动作。
2009年威特电梯部件推出了威特EOS电子限速器。将电子测速与机械制动机理结合,是全球首款装有ACD装置(防溜装置)的电子限速器,优点是使用了电子测速,并且可以在轿厢加速度异常的时候限速器动作,从而及时防范了轿厢的溜车。不足之处在于只实现了防溜车功能,没有完全体现出电子限速器的优越性[2]。电子限速器刚刚起步,发展前景很大。它可以对轿厢溜车、失速进行保护,在保证其运行安全的情况下可以调整底坑高度、顶层高度、缓冲器等。电子限速器有很大的研究意义和现实意义。
1 传统限速器安全钳特点
电梯在正常运行时,轿厢运动通过驱动连杆带动限速器绳和限速器运动,此时,安全钳处于非动作状态,其制停元件与导轨之间保持一定的间隙。当轿厢超速达到限定值时,限速器动作使夹绳钳夹住限速器绳,于是随着轿厢继续向下运动,限速器绳提起驱动连杆促使连杆系统联动,两侧的提升拉杆被同时提起。带动安全钳制动楔块与导轨接触,两安全钳同时夹紧在导轨上,使轿厢制停。安全钳动作时,限速器的安全开关或安全钳提拉杆操纵的安全开关,都会断开控制电路,迫使制动器失电制动[3-5]。限速器和安全钳的联动图如图1所示。限速器动作的速度是确定的,不可变的。
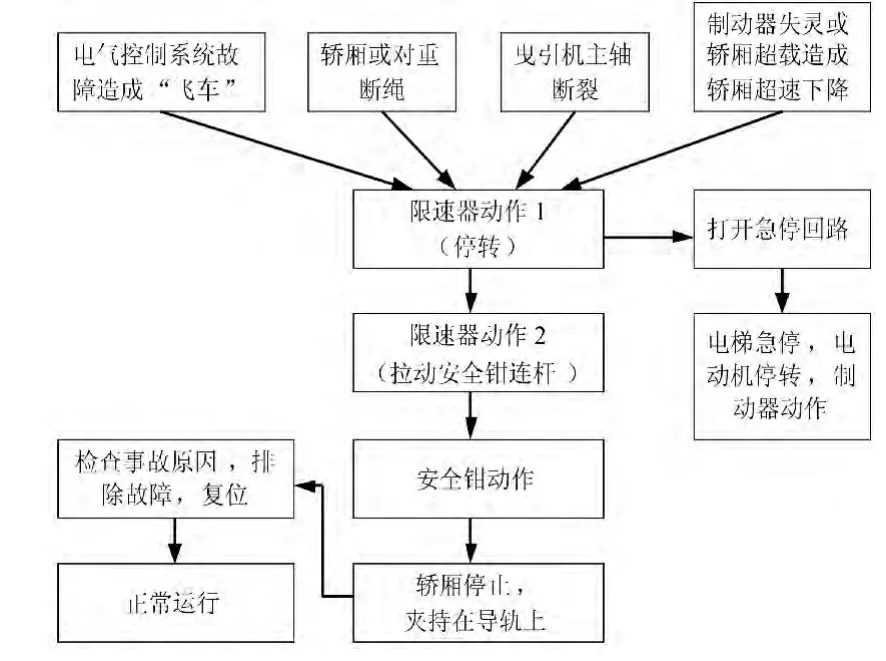
图1 限速器安全钳联动程序图Fig.1 Linkage diagram of the overspeed governor and safety-gear
2 机械—电子限速器的结构、控制及原理
2.1 机械—电子限速器的结构
如图2示为机械—电子限速器。两个绕各自枢轴转动的甩块由连杆连接在一起,以保证两甩块同步运动。甩块由螺旋弹簧固定。限速器绳轮在垂直平面内转动,如果轿厢速度超过额定速度预定值时,甩块的转动因离心力的作用向外甩开,使超速开关动作,从而切断电梯的控制回路,使制动器失电抱闸。如速度进一步增大,甩块进一步向外甩开,并撞击锁闩,松开摆动钳块。正常情况下,摆动钳块由锁闩拴住,与限速器绳间保持一定的间隙。当摆动钳块松开后,钳块下落,将限速器绳夹持在固定钳块上。固定钳块由压紧弹簧压紧,压紧弹簧可利用调节螺栓进行调节。此时,绳钳夹紧了限速器,从而使安全钳动作。同时,电子控制部分电磁伸缩装置6固定在机架的外侧,其内部有一组线圈,加上24V×1A的直流电时,电磁杆便缩回,失电后又伸出。
2.2 电子限速器的控制
电子限速器的控制功能基于AT89C52单片机,如图3所示。AT89C52芯片外接12 MHz晶振,片内含有8 KB的EEPROM,测控程序存储在内部。上电复位电路通过比较器LM393和反相器74HC14将复位信号送到AT89C52的RESET引脚。AT89C52的P3.7脚作为输出,经TLP521光耦隔离和9014三极管放大后,控制继电器1。继电器1被触发后控制电磁杆,电磁杆在缩回的过程中先触动2动作部件和超速开关,使得电气制停轿厢,进而锁闩动作,机械制动轿厢。整个控制系统使用RS232与电梯主板通讯,以获取电梯的实时速度、实时位置与实时加速度。
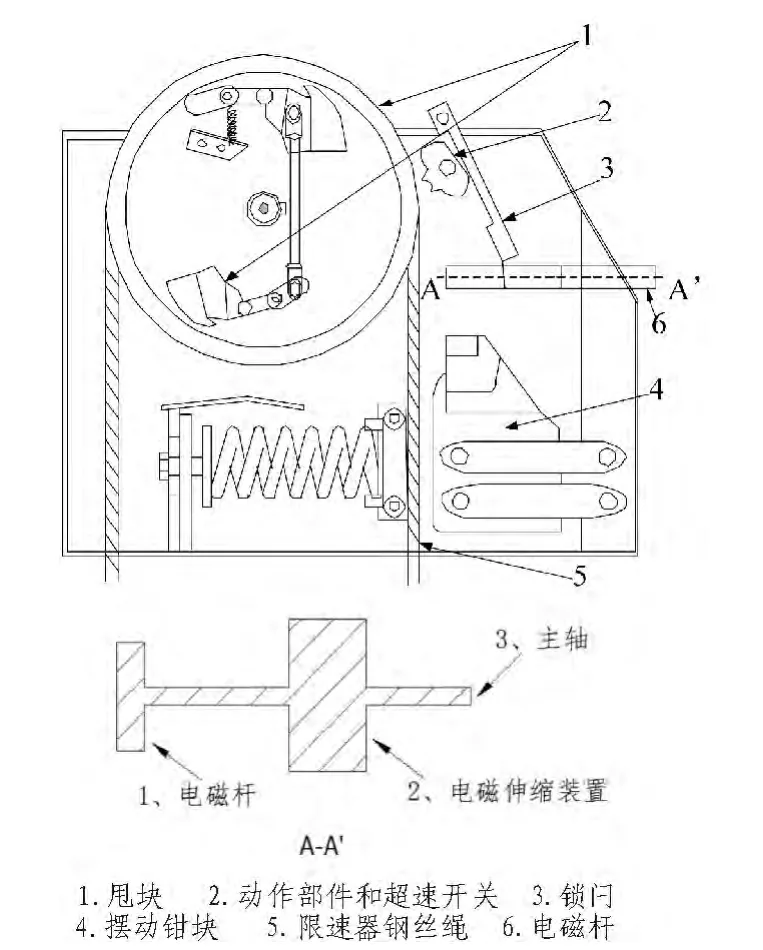
图2 机械-电子限速器的主视图Fig.2 Front view of themachine-electronic overspeed governor
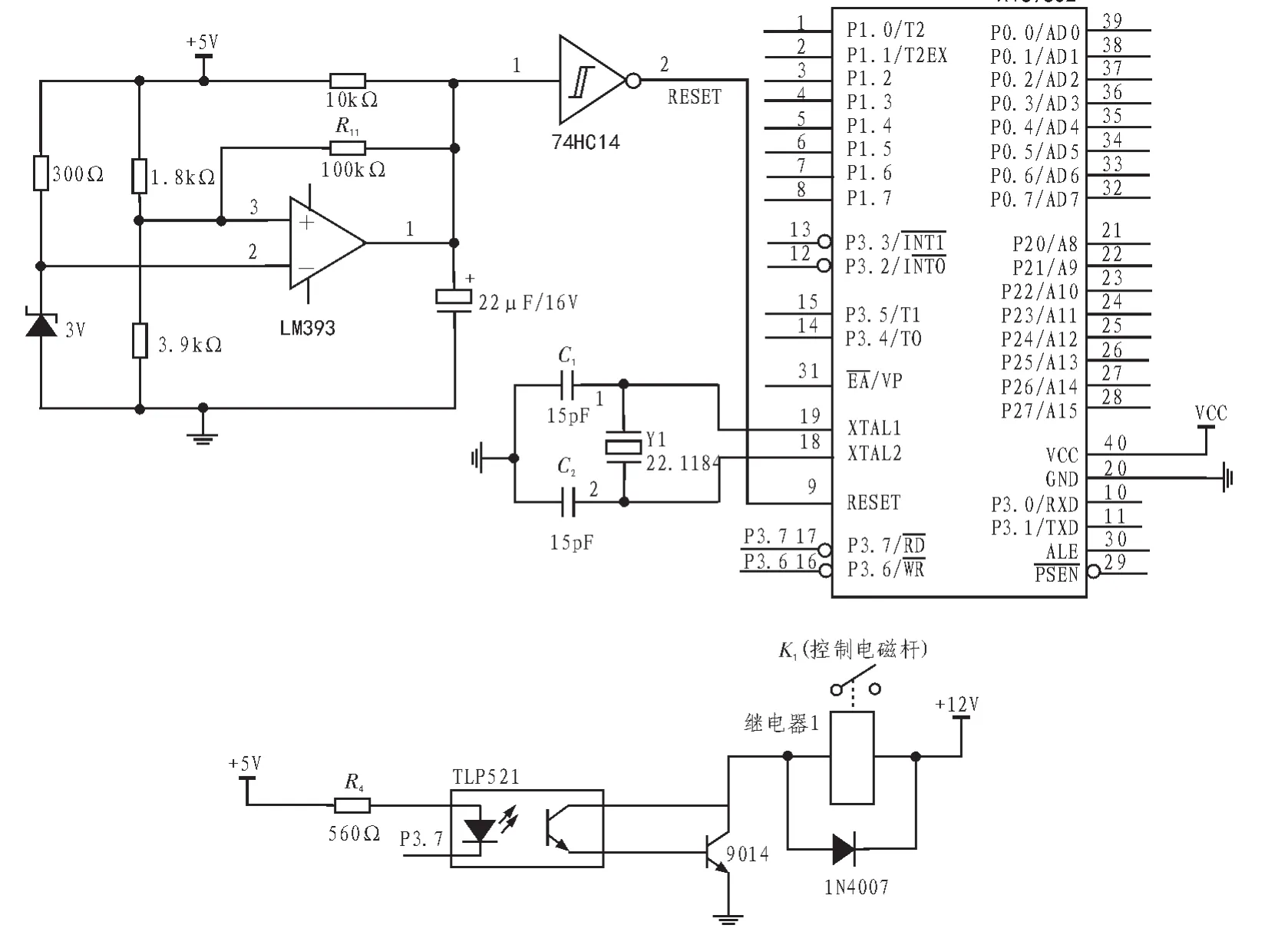
图3 电子限速器的控制系统原理图Fig.3 Control system diagram of the electronic governor
2.3 电子限速器的原理
当电梯轿厢下行移动时,限速器绳随之移动,带动限速器轮盘转动,同时电梯主板检测轿厢当前速度、井道位置与实时加速度。
当单片机AT89C52检查所得的轿厢移动速度小于限速器动作值时,电梯处于正常运转状态。图3中AT89C52的P3.7脚输出高电平,TLP521G光耦截止,所对应的继电器1的常开开关1处于断开状态,AT89C52不会使得限速器动作。
当检测速度达到限速器动作值时,图3中AT89C52的P3.7脚立即输出低电平,经TLP521光耦隔离和9014放大后,继电器1线圈得电,常开触点K1闭合,K1又控制图2中电磁伸缩杆的线圈得电,于是电磁杆立即缩回,首先碰到超速开关动作,从而切断电梯的控制回路,使制动器失电抱闸。电磁杆继续带动超速开关收缩并撞击锁闩,松开摆动钳块。正常情况下,摆动钳块由锁闩拴住,与限速器绳间保持一定的间隙。当摆动钳块松开后,钳块下落,将限速器绳夹持在固定钳块上。固定钳块由压紧弹簧压紧,压紧弹簧可利用调节螺栓进行调节。此时,绳钳夹紧了限速器,从而使安全钳动作。
5 s后单片机AT89C52再控制电磁杆复位伸出。待电梯故障排除后,需手动限速器复位。
3 电子限速器控制主程序框图与特点
电子限速器控制主程序框图如图4所示。
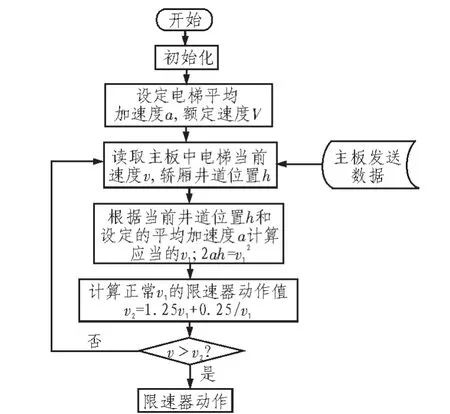
图4 电子限速器控制主程序流程图Fig.4 Flow chart the software design of the electronic governor
本文设计的电子限速器有如下特点:
1)机械与电气相结合,既不改变原机械结构,保证了国标的要求,又加入了电气结构,改善了限速器的性能。
2)速度动作准确。轿厢移动速度是由光电编码器通过电梯主板进行采集的,电气动作速度值和机械动作速度值都能保证高精度。
3)动作速度稳定。只要编码器工作正常,动作速度就不会改变。
4)可移植性好。在已使用的纯机械限速器上,可以通过少量改动把电子限速器移植上去,达到电子——机械双限速。
5)提前预警动作。可在需要限速器动作的情况下提前动作,减少电梯对人员物品的伤害。
4 电子限速器在高速梯上的表现分析
现今电梯按照GB 7588—2003中9.9关于限速器的规定,操纵轿厢安全钳的限速器在电梯速度为额定速度115%时电气动作[6],根据 GB 7588—2003 中 9.9.1(c)有关规定,对于额定速度小于或等于1m/s的渐进式安全钳为1.5 m/s;GB 7588—2003中9.9.1(d)中规定,对于额定速度大于 1 m/s的渐进式安全钳动作速度为:

根据GB 7588—2003 F3.3.1.1,安全钳制动时的平均减速度以0.6gn来计算,制动距离为:

式中:h为安全钳动作后的制动距离,m;v1为限速器动作速度,m/s。
按GB/T 10058-2009规定,乘客电梯起动加速度和制动减速度最大值均不应大于1.50 m/s2;当乘客电梯额定速度为2.0m/s≤v≤6.0m/s时,A95 加、减速度不应小于 0.70m/s2。
以10 m/s的电梯为例,如图5所示,根据公式(1),其安全钳动作速度为12.525m/s;根据公式 (2),其制动距离为13.340m;减速度为5.880m/s2,0.6gn。A95的加减速区距离为30m。若在底层端站电梯没有跟随既定的速度曲线,发生失控,电气开关触发后制动器制动力不足,但速度仍未超过12.525m/s时,安全钳不会动作,电梯势必会不能及时制停,甚至发生蹲底事故。
对比电子限速器,电梯进入减速区后没有正常减速,在进入减速区后还是10m/s,根据公式(1),7.975m/s的限速器安全钳动作速度是10m/s,与之相对应的,在电梯进入减速区12.1m处就会发现电梯速度不正常,从而安全钳动作,制动电梯,此时电梯的制动距离为8.503 m,完全制停后电梯距离A95减速完成段还有12.697m,有效的避免了电梯在未达到额定速度的安全钳动作速度时发生蹲底事故。

图5 10m/s高速梯示例图Fig.5 10 m/s high-speed elevator as example
表1为现今电梯限速器安全钳动作时的速度,平均加速度及制动距离。计算参照公式(1)与公式(2)。
表2为限速器跟随电梯运行速度后当在减速区电梯仍按额定速度下行时,安全钳的动作速度,平均加速度,制动距离,A95加减速度段的最小距离(加减速度取最大值1.5m/s2),及制停后距离A95减速完成时的保证距离。

表1 现今各速度电梯限速器安全钳性能Tab.1 The performance of overspeed governor and safety-gear in each speed elevator nowadays
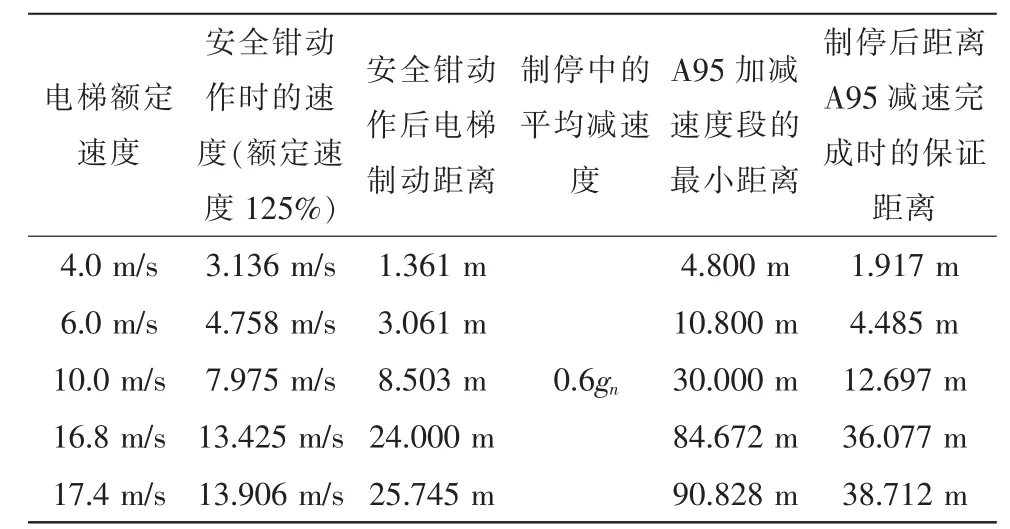
表2 调节后各速度电梯限速器安全钳性能Tab.1 The perform ance of overspeed governor and safety-gear in each speed elevator after adjust
表1与表2电梯额定速度选择高速与超高速中常见的4m/s,6m/s,10m/s,还有世界最快电梯的 16.8m/s,17.4m/s。
蒂森的超高速梯中TWINS已经实现了时刻监控电梯在井道中的位置,这就意味着可以通过控制电梯通过井道各个位置时的限速器的动作速度来实现上述想法,在电梯井道中加减速区选几个位置,轿厢通过这些位置时发出信号,电梯主板将此时轿厢速度通过通信传给电子限速器控制板,此时的速度与加减速区的正常速度相比较,发现超速时电子限速器控制限速器动作。
5 结 论
本文设计了电子限速器上的一个功能,实现了通过轿厢在井道中的位置来调整限速器动作速度,并给出了超高速梯上的数据表现。
未设计全程跟随的原因有3点:一是全程跟随数据处理量较大,需对比实时轿厢速度与给定轿厢速度曲线;二是全程跟随可能造成限速器误动作,轿厢速度有时可能偏离给定速度曲线,但经一小段时间会自动调节好,如果限速器过于灵敏会造成电梯故障多。三是中间段的失速达到限速器动作速度时减速距离足够大。
电子限速器的研究刚刚起步,国内只有一种电子限速器,发展前景很大。电子限速器的对电梯安全、底坑及井道顶部间距的缩短具有有很大的意义。本文也只是通过电子限速器与现今纯机械限速器的结合进行尝试,到实际的应用还有很多路要走。
[1]何丽,石丽华.基于AT89系列单片机的手提式电梯限速器测试仪[J].微型机与应用,2014,33(11):94-96.HE Li,SHI Li-hua.Portable elevator speed limiter tester based on AT89 microcontroller[J].Microcomputer& Its Applications,2014,33(11):94-96.
[2]庞涛.一种新型的电梯限速器 [J].机械工程师,2011(11):28-30.PANG Tao.A new-type speed governor of elevator[J].Mechanical Engineer,2011(11):28-30.
[3]张春玲.即时操纵安全钳的电梯抗坠落安全防护机构[J].世界科技研究与发展,2010,32(3):328-329.ZHANG Chun-lin.Elevator safety mechanism which can operator the safety gear on time[J].Research and Development ofWorld Science and Technology,2010,32(3):328-329.
[4]卢键恩,唐平.电梯安全钳检验及常见故障问题分析[J].科技之友,2011(18):35-36.LU Jian-en,TANG Ping.Analysis of elevator safety gear test and common problems[J].Friends of Science and Technology,2011(18):35-36.
[5]吴涛.电梯电气事故原因分析及预防[J].中国高新技术企业,2011(2):107-109.WU Tao.Elevator electric accident reason analysis and prevention[J].China high-tech Enterprises,2011(2):107-109.
[6]中华人民共和国国家质量监督检验检疫总局.中华人民共和国国家标准:电梯制造与安装安全规范 (GB 7588-2003)[M].北京:中国标准出版社,2003:26-28.
