永磁同步电机多电机同步控制策略
2015-01-13金花宁涛
金 花 宁 涛
(大连交通大学软件学院,辽宁 大连 116045)
永磁同步电机(PMSM)由于转子结构采用永磁体替代了异步电机励磁绕组的机构,降低了转子的发热问题,并且由于永磁同步电机体积小、功率因数高、密度高及低速转矩大等优势逐渐被应用在需要高速运行、负载变化大和短时工作制的领域,同时使得在PMSM上采用全封闭结构和直驱控制方式成为了可能。但是由于永磁同步电机自身结构对同步性的要求,每台电机需单独配备一套牵引变流器,并且与异步电机存在转速、转差不同,PMSM对转速同步性要求较高,电机之间转速差过大会使擦轮严重,如果控制不当,会降低传动系统的性能[1~3]。因此,笔者针对以上问题提出一种多电机同步控制策略。
1 永磁同步电机简介①
多电机同步控制是指系统中的电机按照相同转速运行,并且转速变化是同步的[4,5]。目前多电机同步控制策略主要有并行控制方式、主从控制方式、虚拟总轴控制方式、交叉耦合控制方式及偏差耦合控制方式[6]等。
PMSM的物理结构如图1所示。
建立数学模型之前,先做如下假设:
a. 忽略铁心饱和,不计涡流和磁滞损耗;
b. 永磁材料的电导率为零;
c. 转子上没有阻尼绕组。
相绕组中感应电动势的波形为正弦波。那么基于dq轴旋转坐标系下的PMSM的数学模型为:
(1)
(2)
(3)
(4)
式中id、iq——d、q轴初级电流;
J——转动惯量;
Ld、Lq——d、q轴初级电感;
p——电机极对数;
Rs——初级等效电阻;
Te、TL、T0——电磁转矩、负载转矩和空载转矩;
ud、uq——d、q轴初级电压;
ψd、ψq——d、q轴初级磁链;
ψf——永磁体有效磁链;
Ωr——转子机械角速度。
2 基于单神经元偏差耦合多电机控制
2.1 单神经元PID控制器设计
单神经元PID控制器(图2)具有自学习和自适应能力,其结构简单、环境适应能力强,并且具有较强的鲁棒性,是对传统PID控制的一种改进和优化[7],可根据被控对象参数变化进行自适应调节,在一定程度上解决了控制对象复杂和参数慢时变对系统控制上的不足。

图2 单神经元PID控制结构框图
图2中,xi(k)(i=1,2,3)为神经元的3个输入量,反映的是期望输出和系统给定的偏差状态。在此,将系统给定设为y*(k),实际输出为y(k),两者的偏差为e(k),x1(k)、x2(k)、x3(k)是偏差e(k)经过状态变换器,变换成神经元学习进行控制所需要的状态,性能指标为:
(5)
神经元PID的输出信号u(k)为:
(6)
由式(5)可知,xi(k)(i=1,2,3)分别对应常规PID的P项、I项、D项,改变式(6)中的ωi(i=1,2,3)就相当于改变P、I、D这3个系数,从而形成具有自学习和自调整能力的神经元PID控制器,他们对应的权值分别为ω1(k)、ω2(k)和ω3(k)。笔者采用有监督Hebb学习算法,其神经元的学习过程为:
ωi(k+1)=(1-c)ωi(k)+ηri(k)
(7)
ri(k)=z(k)u(k)xi(k)
(8)
式中c——常数,这里取c=0;
ri(k)——递进信号;
z(k)——误差信号,z(k)=e(k);
η——神经元学习速率,η>0。
因此可得:
(9)
(10)
(11)
其中K为神经元比例系数,K>0;ηP、ηI、ηD分别为比例、积分、微分学习速率。综合考虑多种运行状况将ηP、ηI、ηD和K分别设定为0.5、0.3、0和0.2,加权系数ω1(0)、ω2(0)、ω3(0)分别设定为0.3、0.3、0.3。
由于单神经元学习算法不能直接用传递函数加以描述,因此笔者采用S函数编写模型。单神经元PID控制器仿真模型如图3所示。
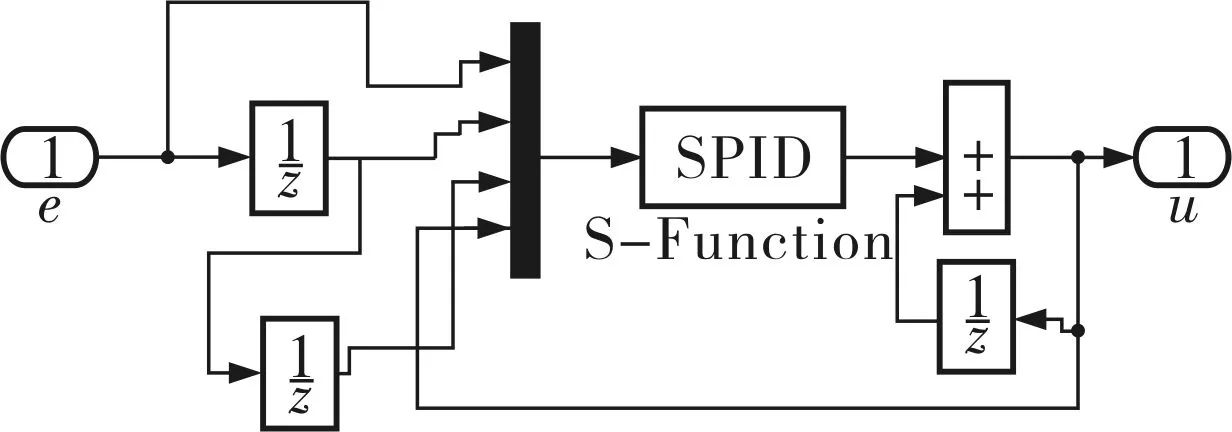
图3 单神经元PID控制器仿真模型
2.2 偏差耦合控制器设计
电机同步控制方式中的并行控制方式是将各电机进行并联,每个电机接收的指令来自同一指令单元,这种控制方式适用于结构简单的系统,即系统采用同型号的电机,能保持各电机转速同步,但缺点是相对整个系统该控制方式没有检测各电机间的转速差值,因此抗扰动能力弱[8]。
主从控制方式是设定一个主电机,其余电机转速跟随主电机转速进行变化,而主电机不跟随从电机进行变化,因此这种控制方式适用于电机有明显主从关系的系统。
交叉耦合控制方式是在并行控制方式的基础上增加了电机转速的检测和反馈。电机之间的转速跟随其他电机转速的变化而变化,但是这种方式经过验证仅适用于两台电机同步控制的场合。
偏差耦合控制方式是在交叉耦合控制方式的基础上进行了改进,将各个电机转速反馈值经MUX和DEMUX环节进行整合后,通过转速补偿对电机转速进行调节(图4)。笔者利用单神经元PID控制器替代传统转速补偿,使其更有效地解决被控对象之间的转速跟随、过程跟随及动态性能匹配等非线性问题,更好地实现了多电机间的同步控制。

图4 基于单神经元PID的偏差 耦合控制系统框图
笔者采用3台永磁同步电机进行同步控制研究,同步控制方式采用偏差耦合控制方法,并用单神经元PID控制器代替传统转速补偿模块。系统仿真模型为:采集各个电机转速,经单神经元PID控制器,将调节后的转速误差信号与给定转速进行负反馈后送入PMSM调速系统。
3 系统仿真实验
笔者利用Matlab7建立了永磁同步电机双闭环控制系统模型(图5),采用有监督Hebb学习算法的单神经元PID控制器,并将其引入到传统偏差耦合多电机同步控制中,替代了转速补偿模块。

图5 单神经元PID偏差耦合多 电机同步控制系统仿真模型
PMSM额定参数为:额定电压UN=300V,额定频率fN=100Hz,定子电阻Rs=0.9585Ω,电感Ld=Lq=5.25mH,转子永磁体磁通ψf=0.1827Wb,电机极对数p=4,摩擦因子F=0.0003035N·m·s。3台电机转动惯量分别为:0.6329、0.6429、0.6529g·m2。仿真实验从以下两个方面来验证笔者提出方法的合理性。


图6 3台电机的转速跟随曲线局部放大曲线
3台电机在t=0.1s时的同步转速误差曲线如图7所示。
通过图6、7可以看出,由于采用具有监督Hebb学习方法的单神经元PID控制器替代传统转速补偿模块,使得基于改进的偏差耦合多电机同步控制系统具有很强的自调节能力,当转速突变时,系统超调小、鲁棒性强、电机间转速很快达到同步。

图7 3台电机在t=0.1s时的同步转速误差曲线
突加负载扰动。电机以n*=1000r/min空载启动,当t=0.1s时,各电机突加负载TL=3N·m;当t=0.3s时,各电机的负载减少为TL=1N·m。仿真实验转速波形和局部放大波形如图8所示。
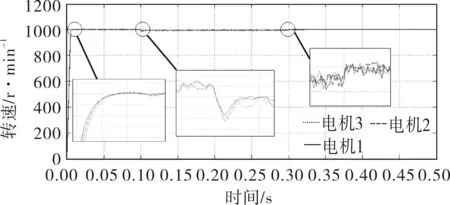
图8 基于单神经元PID偏差耦合同步 控制3台电机转速跟随曲线
从图8可以看出,当电机给定转速空载启动时,各个电机转速基本无超调,跟随性好。当t为0.1、0.3s突然加减负载扰动时,电机间调节时间短、鲁棒性好,很快进入同步状态。
4 结论
4.1由于采用有监督Hebb学习算法的单神经元PID控制器,学习速率ηP、ηI、ηD取值裕度比较大,而根据公式可知增益K取值非常重要,取值偏大会增大系统超调,偏小会增加系统响应时间。
4.2建立了PMSM单神经元PID的偏差耦合控制数学模型,利用Matlab7搭建了系统仿真模型,对转速突变和突加、减负载两个方面进行仿真实验分析,通过实验结果说明有监督Hebb学习算法的单神经元PID运用到偏差耦合多电机同步控制系统中,使系统具有良好的自适应能力,能够有效地减小超调甚至无超调,提高系统响应能力,增加系统的鲁棒性,充分验证了笔者提出基于单神经元PID的偏差耦合多电机同步控制方法的合理性。
[1] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[2] 张世韬,杨风,郝骞.单神经元PID控制器研究及仿真[J].机械工程及自动化,2009,(3):69~70.
[3] 侯勇严,郭文强.单神经元自适应PID控制器设计方法研究[J].微计算机信息,2005,(12):8~9,17.
[4] Perez-Pinal F J,Caladeron G,Araujo-Vargas I.Relative Coupling Strategy[C].2003 IEEE International Electric Machines and Drives Conference.USA:IEEE,2003:1162~1166.
[5] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2008:128~129.
[6] Miroslav M,Hodder A,Perriard Y.Analysis of the Commutation Currents for a Sinusoidal BLDC Motor[C].2008 International Conference on Electrical Machines and Systems.Wuhan:IEEE,2008: 3016~3019.
[7] 苗新刚,汪芬,韩凌攀,等.基于偏差耦合的多电机单神经元同步控制[J].微电机,2011,44(2):44~47.
[8] 刘坤.多永磁同步电机同步控制策略的研究[D].长沙:中南大学,2011.
SynchronusControlStrategyforPermanentMagnetSynchronousMulti-motor
JIN Hua, NING Tao
(SchoolofSoftware,DalianJiaotongUniversity,Dalian116045,China)
Considering the characteristics of permanent magnet synchronous motor, the single neuron PID-based deviation coupling synchronization control strategy was proposed and the mathematic model concerned
