急倾斜特厚煤层综放工作面综采自动化控制设计与应用
2015-01-07华陈新川罗洪波薛天山冯
田 华陈新川罗洪波薛天山冯 旭
(1.神华新疆能源有限责任公司,新疆维吾尔自治区乌鲁木齐市,830027; 2.北京天地玛珂电液控制系统有限公司,北京市朝阳区,100013)
急倾斜特厚煤层综放工作面综采自动化控制设计与应用
田 华1陈新川1罗洪波1薛天山1冯 旭2
(1.神华新疆能源有限责任公司,新疆维吾尔自治区乌鲁木齐市,830027; 2.北京天地玛珂电液控制系统有限公司,北京市朝阳区,100013)
针对急倾斜特厚煤层综放工作面生产效率低和安全风险高的现状,提出了综放工作面综采自动化控制系统,介绍了该自动化控制系统的总体设计,实际应用表明该自动化控制系统能够有效地减少综采工作面人员,提高了矿井的生产效率,达到了安全、高产和高效的目的。
急倾斜特厚煤层 综放工作面 自动化控制 协同控制
乌鲁木齐市矿区赋存30多层厚度与间距迥异的急倾斜(45°~87°)煤层,开采技术条件复杂,很难形成较大的生产能力。急倾斜特厚煤层大都采用分层放顶煤开采工艺进行开采,开采厚度大(每一层超过20 m)且开采后都将对工作面造成矿压冲击,极易伤害工作面人员。此外,由于煤层厚度大和放煤量大,放煤过程中经常会瞬间释放大量的有害气体,严重威胁到工作人员的生命安全。因此,为了有效解决冲击地压和有害气体对工作人员造成的人身伤害,减少工作面的人员数量,提高工作面的生产能力,急需开展急倾斜特厚煤层综放工作面安全高效开采技术的研究。因此,提出了综放工作面综采自动化控制系统的设计方案,并在神华新疆能源有限责任公司乌东煤矿475B3+6综放工作面进行了应用。
1 开采情况概述
神华新疆能源有限责任公司乌东煤矿井田东西走向长约10.8 km,南北宽约0.7~2.7 km,面积约20.28 km2,矿井设计可采储量为539.89 Mt。井田含煤地层为中侏罗统的西山窑组,含煤层数多,第四纪的覆盖物遍布全区。井田内煤层赋存稳定,水文地质条件简单,属低瓦斯矿井。煤层粉尘具有爆炸危险,有发火倾向性,属易自燃煤层。
475B3+6综放工作面处于+475水平东翼采区,开采水平为+475水平,采面标高为+475 m,设计走向长度为2520 m,阶段高度为25 m,工作面倾向长度为43 m,面积为108360 m2。工作面煤层赋存稳定,为单斜构造且构造简单。煤层平均厚度为43 m,倾角为87°~89°,平均倾角为88°,走向为N58°~60°之间。煤层主要为弱粘结煤,次为长焰煤,均为很好的动力用煤,煤以光亮煤为主,煤层灰分为15%,水分为8.00%,全硫为0.53%,发热量为28.50 MJ/kg。475B3+6工作面可采储量为281万t,煤层厚度为25 m,机采高度为3.0 m,放顶煤厚度为22 m,采放比为1∶7.33,采用急倾斜特厚煤层综合机械化放顶煤采煤方法进行开采。
2 综放工作面主要设备选型
为了保证生产的稳定性、连续性和递增性,最大程度地发挥设备效率,根据急倾斜特厚煤层的赋存条件以及乌东煤矿南采区475B3+6综放工作面的情况,对主要开采设备进行的选型见表1。
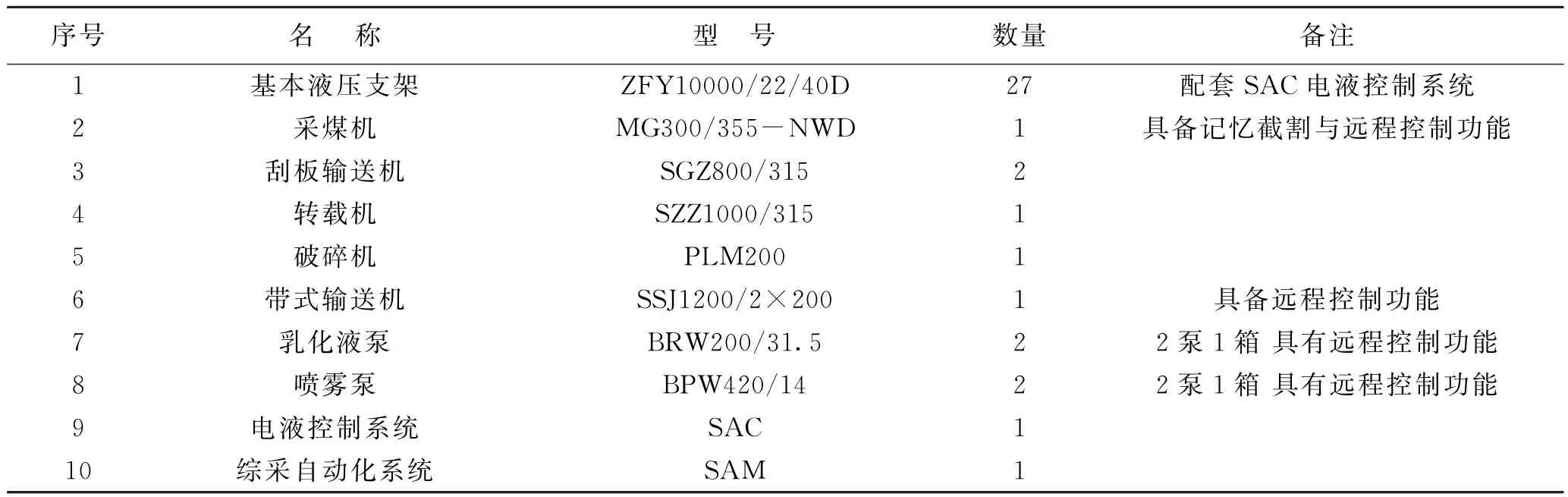
表1 475B3+6综放工作主要设备配套选型
3 综放工作面综采自动化控制系统总体设计
3.1 系统架构
综放工作面综采自动化控制系统是将采煤机控制系统、支架电液控制系统、工作面运输控制系统、带式输送机控制系统、泵站控制系统、供电系统、语音通讯系统以及视频系统有机结合,实现对综合机械化采煤工作面设备的协调管理、数据采集与集中控制。系统主要由综采单机设备层、监控中心和地面监控3部分组成,系统架构如图1所示。

图1 综放工作面综采自动化控制系统架构
3.2 系统方案设计
3.2.1 监控中心
监控中心是整个急倾斜综放工作面控制的核心部分,主要由监控主机、操作台以及交换机等设备组成,实现工作面主要设备(液压支架、采煤机、三机、泵站、带式输送机和组合开关)的数据监测与集中控制功能。
3.2.2 工作面高速工业以太网通信平台
利用工作面综合接入器、光电转换器和交换机,建立一个统一开放的百兆工业以太网工作面,使工作面设备连接到集控中心的监控主机上,实现工作面设备信息汇集。工作面支架每隔一定数量布置1台综合接入器,通过连接器进行设备间的连接。
3.2.3 工作面可视化视频监控
工作面每隔一定数量支架安装3台矿用本质安全型摄像仪,1台照射液压支架,1台照射煤壁,1台照射后部刮板运输机。此外,在刮板运输机机头、机尾、转载机、带式输送机机头以及监控中心各安装摄像仪1台,便于观察工作面其他关键部位运行情况。摄像仪的视频数据通过工业以太网传输到监控中心显示器显示,显示器可以同时显示4台摄像仪拍摄的图像,并可跟随采煤机位置变化自动切换显示采煤机附近4台的视频图像。
3.2.4 液压支架跟机自动化及远程干预控制
液压支架配套SAC型电液控制系统,通过在立柱安装红外线接收器以及在采煤机机身上安装红外线发射装置,实现液压支架跟随采煤机自动化功能。
SAC电液控系统具有远程控制接口,支架远程操作台通过该接口与工作面支架电液控制系统实现控制信号的传输,配以电液控数据和工作面视频画面为辅助手段,实现对液压支架的远程控制,远程控制功能包括液压支架单架与成组推溜,降架、拉架、升架、伸收互帮、放煤、喷雾等动作及工作面自动跟机功能的开启与关闭。液压支架远程控制示意图如图2所示。

图2 液压支架远程控制示意图
3.2.5 采煤机记忆割煤及远程干预控制
采煤机控制系统采用采高传感器实现采高自主定位,采用位置传感器实现工作面位置自主定位,具有记忆截割功能与远程双向通讯功能。通过与采煤机控制系统双向通讯,可实现在顺槽监控中心对采煤机的数据监测;依靠采煤机数据和工作面视频画面为辅助手段,通过采煤机操作台可实现采煤机的远程干预及记忆截割(在储存器截割中已经储存了人工截割的数据,采煤机根据存储的数据进行自动割煤),采煤机远程控制图如图3所示。
3.2.6 工作面“一键”启停及顺序联动
在监控中心通过权限验证后可实现在对综放工作面设备的“一键”启停控制。
(1)“一键”启动:泵站启动、一部带式输送机启动、二部带式输送机启动、破碎机启动、转载机启动、刮板输送机启动、采煤机记忆割煤程序启动、液压支架跟随采煤机自动化控制程序启动,全自动化启动。
(2)运行过程:操作人员实时监控工作面综采设备运行工况,当设备运行异常,可通过人工干预手段对设备进行远程干预。如对采煤机的摇臂、液压支架的动作进行调整等。
(3)“一键”停机:液压支架跟机动作停止、采煤机停机、刮板输送机停机、转载机停机、破碎机停机,二部带式输送机停止、一部带式输送机停止、全自动化停止。

图3 采煤机远程控制图
(4)急停:按下工作面“急停”按钮,工作面所有设备停机。
3.2.7 工作面协同控制
在液压支架护帮板处安装压力传感器,用来感知液压支架护帮板对煤壁的支护效果,并将数据反馈给支架控制器,如发现本架护帮板支护压力没有达到规定压力则自动进行护帮板动作,保证护帮板对煤壁的支护完好,能够有效防止大块煤垮落对生产设备和人员产生危害。
在液压支架护帮板处安装接近传感器,在支架动作过程中,通过接近传感器检测采煤机运行前方护帮板收回状态并反馈给控制器,如接近传感器未检测到护帮有效收回信号,综采自动化会系统发出报警信号并降低采煤机的速度或停止采煤机,以便操作人员能够及时做出响应。
通过监测刮板输送机的电流值,可以反映刮板运输机的负荷情况,当刮板运输机的负荷过大时,可控制采煤机降低速度或停机,并停止推溜、拉架以及放煤等支架动作。当负荷较小时,可控制采煤机提高速度以提升产量,负荷控制曲线图如图4所示,在t1阶段运输机处在低负荷阶段,这时可以控制采煤机提高速度;在t2阶段运输机达到额定负荷时,采煤机速度也达到恒速段并正常运行;当在t3阶段运输机超负荷运行时,这时控制采煤机速度降低,必要时停机,以保证运输机不被煤块压死;在t4阶段,当运输机处在低负荷的时候,提高采煤机速度,以提升工作效率。

图4 负荷控制曲线图
3.2.8 工作面设备三维仿真
综采工作面三维虚拟现实系统采用了先进的虚拟现实技术构建出高仿真度的虚拟矿井作业场景。通过读取综采自动化控制系统的实时数据,同步的显示在虚拟矿井作业对应的场景,实现数据三维可视化的目的。利用开发平台的优质效果,使用户在使用系统时有身临实境的感觉。用户可通过系统中报警状况的提示、设备属性的显示、自主或智能自动漫游以及历史数据的回放等功能,充分了解整个作业面中各设备的实时运行状况,达到监测、协助和分析等目的。
4 结论
该急倾斜特厚煤层综放工作面自动化控制系统于2014年10月开始井下安装调试,12月下旬开始投产。经过4个月的使用,系统运行稳定,具有以下优点:
(1)在监控中心通过网络传输视频信号,实时监控工作面情况。
(2)采煤机记忆割煤,支架跟随采煤机自动控制,监控中心一键启停控制,实现工作面少人化作业,将工作面的工作人员由原来的17人减少至8人,提高采煤效率,人员配置见表2。
Design and application on automation control of fully mechanized mining in fully mechanized caving face in steeply inclined and extremely thick coal seam
Tian Hua1,Chen Xinchuan1,Luo Hongbo1,Xue Tianshan1,Feng Xu2
(1.Shenhua Xinjiang Energy Co.,Ltd.,Wulumuqi,Xinjiang 830027,China; 2.Beijing Tiandi-Marco Electro-Hydraulic Control System Company Ltd.,Chaoyang,Beijing 100013,China)
Aiming at the current situation of low efficiency and high safety risk in fully mechanized caving face in steeply inclined and extremely thick coal seam,automation control system of fully mechanized mining was put forward,and the overall design of the automation control system was introduced.The practical application showed that the system could decrease the workers in fully mechanized mining face,improve the mine production efficiency and achieve the purposes of safety,high yield and high-efficiency.
steeply inclined and extremely thick coal seam,fully mechanized caving face, automation control,cooperative control
TD823.97
A
