一种罗拉车控制系统通用平台的设计与实现
2015-01-04陈禹伶王体泮
陈禹伶,王体泮
(绵阳市维博电子有限责任公司 四川 绵阳 621000)
在服装行业的细分市场——皮革制品和装饰工业中的锁式线缝需求,占总需求的30%左右。尤其是近几年来,随着人们对品质、款式的追求,对线缝质量的要求越来越高,靠以前传统的线缝工艺和控制方法,已经无法满足这日益扩大的需求,不少企业已经在寻求同类的高档设备和配套的控制系统,以更加高效地完成高质量的锁式线缝加工。高档的锁式线缝设备及系统成为市场新的争夺点,谁先取得突破技术难并降低成本,谁就先获益,谁也就获益最大。
对于目前国内市场上,完成皮革制品和装饰工业中的锁式线缝的设备,基本上是进口的,其中比较有名的一家就是PFAFF的1571、1591和1574 3种型号。但由于其它多种原因,这3种型号的控制系统后期的维护和发展仍停留在最初的阶段,且操作使用不是方便,又无中文界面,不能很好地满足使用需要。
仅管是3种不同的型号,但控制系统却基本一样的,这无疑上扩大了控制系统的使用范围,开发很有意义。
1 系统总体设计
本系统硬件平台采用嵌入式工业控制机+高性能运动控制卡架构;软件平台为WINCE实时操作系统。这种开放的、模块化的软硬件平台可作为罗拉车系统的通用平台,方便满足不同用户的需求,使已有成果得到充分应用,降低了开发成本,缩短产品的开发周期,提高了产品对市场变化的迅速反应能力。
1.1 罗拉车工作原理
罗拉车 MAS1571、1591和1574是一种高速的、具有向前和向后送料的送料轮、滚轮压脚的以及针送料的缝纫机。MAS 1571、1591是单柱,1574是双柱[1]。在工作原理上是相同的。
罗拉车的工作原理比较简单:当把料放在送料轮上,上滚轮放下,踩脚踏板,机器开始工作。在缝纫过程中,当针上位时,摆针与滚轮反向运动,继续送料;而在针下位时,摆针与滚轮反向运动,送料继续。也就是说每一针步过程中,摆针轴有一个反向的过程,而在连续缝纫过程中,滚轮轴只在起缝时和缝纫结束时有加减速,而在中间则保持匀速,主轴速度波动对针轨迹影响较大。
在缝纫过程中,机针除了上、下运动外,还需要同步摆动;但一个完整针步的形成,只在上针位区间内就完成:即一个针步,滚轮轴与摆针由同一点开始反向运动,各自完成一半针距,从而合成一个完整的针距;而在下针位时,滚轮轴与摆针同向运动,又回到起点,开始下一针距的缝纫。
1.2 系统总体结构
通过对罗拉车缝纫原理的分析,本文提出了采用ARM主板和智能运动控制卡的双CPU构架方式。系统控制软件分为上位机和下位机两部分[2]。上位机系统与下位机系统之间通过高速串行总线RS232来完成。上位机采用嵌入式ARM主板,外接液晶触摸屏,USB接口。下位机是智能运动控制卡,包括DSP,FPGA和主轴伺服控制器,3个轴的步进驱动器,I/O接口,系统电源等。系统供电单元为系统提供5 V,32 V,70 V电源。系统总体控制方案如图1所示。
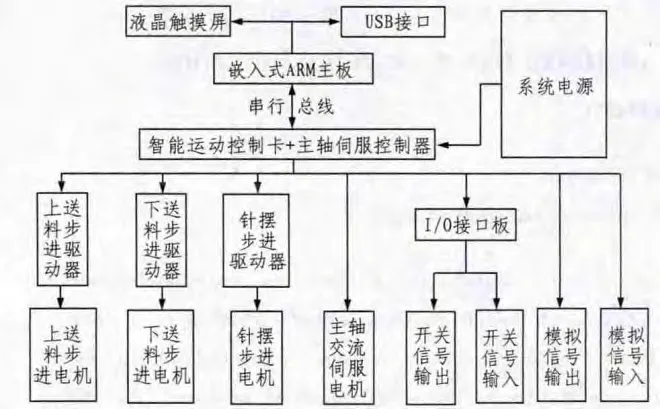
图1 系统总体控制方案Fig.1 Whole control system scheme
2 硬件设计
系统的硬件架构采用ARM主板+DSP+FPGA的双CPU构架方式[3]。这种主从式系统,用ARM作为应用处理器进行多样化的应用开发和用户界面和接口,利用DSP+FPGA进行算法加速,既能够保持算法的灵活性,又能提供强大的处理能力。缝纫过程控制思路是采用跟随控制模式,以解决主轴速度波动对针轨迹带来的影响。上、下滚轮轴、摆针轴的运动均以主轴脉冲作为插补脉冲源,在整个缝纫过程中,此三个轴的运动始终与主轴的转速保持速率同步,而运动方向则与主轴的转速无关。在针距数据分割方面,根据缝纫的过程,每一针需要分成两步且合并完成:上针位时前半针,摆针轴与滚轮轴反向送料;下针位时后半针,摆针轴与滚轮轴同向送料。在一针的运动过程中,摆针轴需要作一次反向运动。
2.1 开发式ARM平台设计
嵌入式ARM主板采用SAMSUNG公司的S3C2440A为核心板。外接液晶触摸屏,控制显示。同时具有RS232通讯接口和USB接口。上位机子系统对外接口示意图如图2所示。
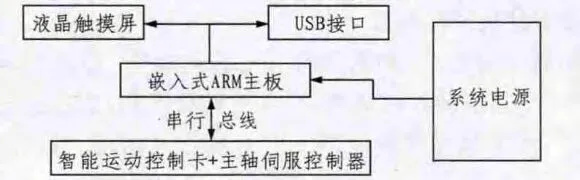
图2 上位机子系统对外接口示意图Fig.2 Host machine system interface
2.2 基于DSP+FPGA架构的多轴智能运动控制单元设计
从机控制卡采用DSP+FPGA架构,DSP芯片采用 TI公司的TMS320LF2407A[4],FPGA芯片采用Actel公司的A3P400 PQ208。下位机子系统对外的接口主要有:RS232通讯接口,电气接口和轴驱动控制接口。如图3所示。
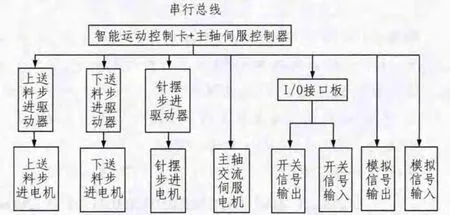
图3 下位机子系统外部接口示意图Fig.3 Slave machine system interface
DSP+FPGA[5]系统最大的优点是结构灵活,具有较强的通用性,适合于模块化设计,从而能够提高算法效率。具有开发周期短,系统容易维护和扩展,特别适用于实时信号处理。
运动控制板可以控制3个步进电机驱动的进给轴,分别是轴X:上送料滚轮,轴Y:下送料滚轮,轴3:摆针轴,1个交流伺服电机驱动的主轴。具有10个光电隔离的输入,10个光电隔离的输出,5个电流闭环的电磁铁输出,1个PWM调节的LED灯驱动输出。
FPGA作为DSP的一个通过存储器扩展的外设,DSP访问之与访问一般的存储器相似。
3 软件设计
系统软件主要实现人机界面交互,功能设置,对主轴和3个步进轴实时运动的控制以及系统自诊断功能。主要分为上位机(ARM主板)和下位机(智能运动控制卡)两部分软件。
上位机子系统ARM主板硬件载体,运行于WCE操作系统下,完成本数控系统所有的人机交互功能,且驻留在主板载存储器上。软件运行于WCE操作系统下,源代码以EVC为开发环境,CC++编程[6-7],并形成最终的EXE文件作为上位机控制程序。在WCE操作系统启动后,自动运行该应用程序。上位机子系统的主要功能包括:触摸屏、软键盘功能;参数管理功能;花样文件管理功能;手动缝纫功能;编程缝纫功能;状态、信息显示功能和花样编辑功能。
下位机子系统以DSP TMS320F2407A为载体 (专用的FPGA为DSP存储器外设),没有专门的操作系统,完成缝纫过程的具体运动控制,并随时响应上位机下发的各种命令。下位机系统软件的源代码以 CCS3.1或CCS3.3(Code Composer Studio 3.3)为开发环境,采用C语言和DSP汇编语言编程,形成最终的目标代码.out或.hex形式的文件直接固化在DSP的片上FLASH中,上电后则可自行启动运行。
下位机子系统软件则是驻留在DSP中FLASH中的目标代码和驻留在板卡FRAM中重要参数内容。下位机子系统的主要功能包括:报警、运行状态采集功能;参数应用控制;速度、位置控制;自动缝纫过程控制;手动缝纫过程控制;辅助功能(电机试运行、A/D采样显示、试机运行等)。
系统主流程图如图4所示。
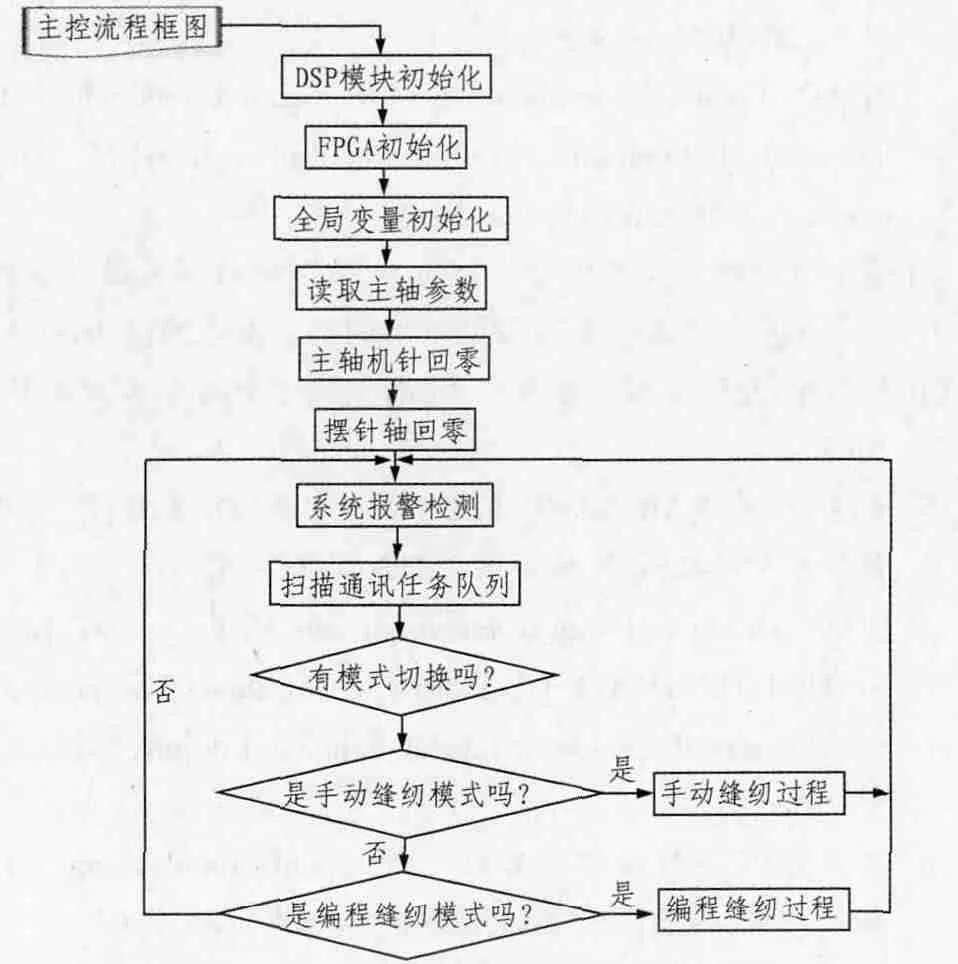
图4 系统主流程框图Fig.4 System block diagram
罗拉车在缝制过程中,分为手动缝纫和编程缝纫两种方式。手动缝纫中,需要生成专用于手动缝纫下的针迹工艺控制数据文件,只有一个线缝段,包含所有的缝纫控制信息,但没有针迹数控制要求。编程线缝流程与手动线缝类似,区别就在于正常针轨迹的缝纫过程,而起始套结与终点套结的缝纫过程是一样的。在正常针轨迹的缝纫过程中,当前段缝纫完成后,需要继续取下一段的线缝数据,从而开始下一段的缝纫过程。手动线缝流程框图如图5所示。
4 人机界面设计
目前市面上的罗拉车系统都采用按键屏的方式,操作不便。在本文中,采用640x480的液晶触摸屏。界面设计沿用了按键屏的图标,减少用户的认知负担,保持界面的一致性,满足了非专业用户的需求。
通过操作系统界面,可以实现手动缝纫,编程缝纫模式切换。不同用户可以根据自身的需求进行参数设置,然后发送指令给下位机进行缝纫。同时该操作系统具有自诊断功能,通过报警页面的显示,使用者能快速有效的找到报警原因。部分界面如图7~9所示。
5 结束语
目前,该系统已与百福工业机械(太仓)有限公司进行配套。经过试用,该系统功能与技术指标与原有系统相当,个别指标已经超过了原有系统,但在价格上与其相比具有很大的优势,它已经成为了极具市场竞争力的产品。
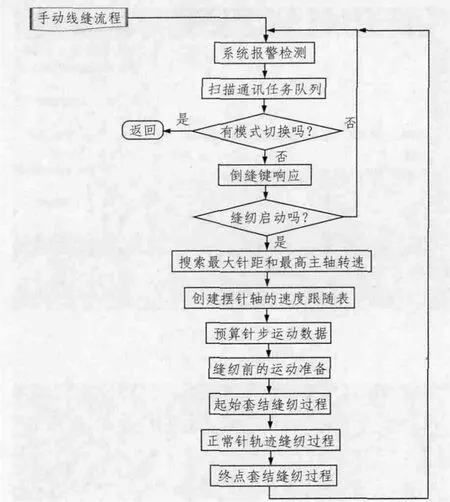
图5 手动线缝流程图Fig.5 Manual sewing flow chart
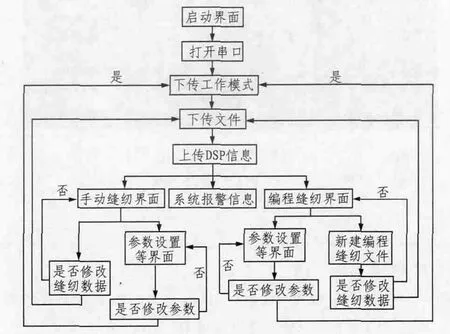
图6 系统界面流程图Fig.6 System interface flow chart
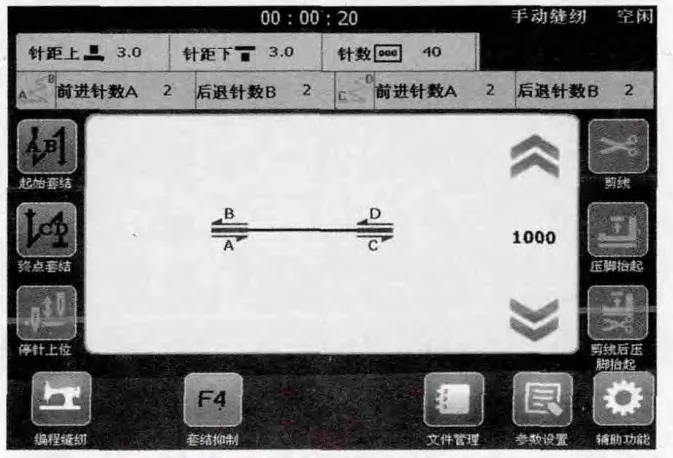
图7 手动缝纫界面Fig.7 Manual sewing interface

图8 编程缝纫界面Fig.8 Program sewing interface
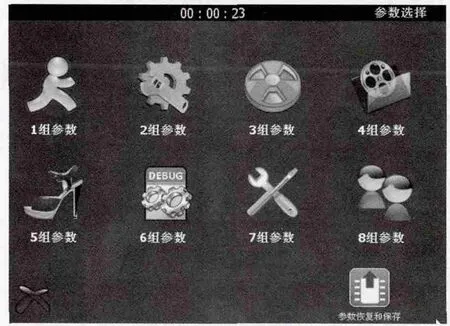
图9 参数设置界面Fig.9 System parameters setting interface
[1]Mauser Spezial.MAS1571,1574,1591 instruction manual[M].Pfaff Industrial(Taicang) Co.,Ltd,2013.
[2]赵毅忠.嵌入式平头锁眼机控制系统的设计[J].自动化与仪表,2014(4):47-49.ZHAO Yi-zhong.Application of embedded technology to lockstitch buttonholing machine control system[J].Automation&Instrumentation,2014(4):47-49.
[3]绵阳市维博电子有限责任公司.电脑花样缝纫机运动控制方法[R].中国发明专利,ZL200810147963.9,2013-01-09
[4]刘向东.DSP技术原理与应用[M].北京:中国电力出版社,2007.
[5]董海涛.基于ARM+DSP+FPGA的可重构CNC系统[J].华中科技大学学报:自然科学版,2012(8):52-55.DONG Hai-tao.Design of reconfigurable CNCsystems based on ARM+DSP+FPGA[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2012 (8):52-55.
[6]汪兵.EVC高级编程及其应用开发(Embedded Visual C++嵌入式编程)[M].北京:中国水利水电出版社,2005.
[7]赵俊生.嵌入式Linux系统图形界面显示方法的实现[J].工业仪表与自动化装置,2014(2):53-55.ZHAO Jun-sheng.Implementation of embedded Linux system graphical interface display method[J]. Industrial Instrumentation&Automation, 2014(2):53-55.