基于MATLAB和ADAMS的转台系统联合仿真
2015-01-03王会彬赵海娜郑华山
王会彬 赵海娜 郑华山
(北京航天光华电子技术有限公司,北京 100854)
基于MATLAB和ADAMS的转台系统联合仿真
王会彬 赵海娜 郑华山
(北京航天光华电子技术有限公司,北京 100854)
目前,对转台控制系统的研究主要采用通过建立一定的数学模型,然后利用MATLAB软件进行软件仿真,最终得出控制结果的方式进行。然而,数学模型往往与实物差别较大,导致控制模型不够准确。研究表明,运用ADAMS软件和MATLAB软件分别建立机械系统的仿真模型和控制模型,然后进行联合仿真,可在很大程度上避免由于数学模型不精确而带来的控制误差问题,为实际系统控制参数的调试提供理论参考,从而缩短系统的研发周期,使设计工作更加高效。
系统仿真,PI,速度环,位置环
引 言
ADAMS软件可提供强大的建模、仿真环境,使用户能够对复杂的机械系统进行建模、仿真和分析,具有十分强大的运动学和动力学分析功能,被广泛应用于工程领域,而MATLAB软件则凭借其强大的计算功能,迅速成为算法设计和模型仿真不可缺少的工具。将ADAMS软件和MATLAB软件相结合进行联合仿真,可将机械系统仿真分析与控制系统仿真设计有机结合起来,实现对机电一体化系统的联合仿真分析,避免了仅仅应用数学公式去辅助建立复杂的机械系统模型,从而使机械系统模型更加准确,同时使控制算法更加有效、更加贴近实际。
1 转台系统介绍
整个转台系统由转台台体和控制箱组成,台体模型如图1所示,主要有俯仰和方位2个自由度组成。其中,俯仰系统以步进电机作为执行驱动机构,方位系统以交流伺服电机作为驱动机构;根据实际需求,方位系统要求能够进行360°连续旋转,俯仰系统要求能在±10°内运动。

图1 仿真转台模型图
2 基于MATLAB软件的控制仿真模型建立
2.1 模型简化
由于ADAMS软件在对机械系统进行运动学、动力学分析计算时,只考虑构件的质心和质量,而对各个构件的外部形状不予考虑,因此,在建模过程中,对复杂系统和各个构件的外形进行精确描述并没有太多的实际意义。所以,在采用ADAMS软件建模之前,必须对物理样机模型进行简化处理。使用ADAMS软件对机械系统建模及简化,应遵循以下原则:(1)根据运动关系简化模型,各个构件之间的运动副关系要表达清楚;(2)在不影响视觉效果的前提下,模型外形应尽量简化;(3)多个构件固结时,可只用1个构件表示,以减少运动副数量。简化后的模型由底座、俯仰平台及方位平台组成,如图2所示。本模型采用SolidWorks软件建立,将简化的模型另存为“.x_t”格式,并导入到ADAMS软件中。

图2 转台简化模型
2.2 创建输入输出变量
对导入的模型添加材料等属性,底座和俯仰组件,以及俯仰组件和方位组件分别添加旋转副,同时为俯仰组件添加单分量力。如图3所示,以转台的俯仰角度控制为例,对于转台系统输入的是转矩,输出的是俯仰平台的转动角度和角速度,因此,设置转矩为系统的输入变量,俯仰平台的转动角度和角速度为输出变量(具体设置如图4所示),加载ADAMS软件的Controls模块,设置输入、输出对象,选择MATLAB软件作为目标软件,完成后会生成xx.m、xx.cmd、xx.adm等3个文件。
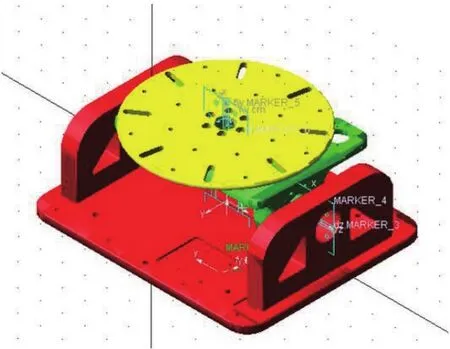
图3 转台的ADAMS软件模型
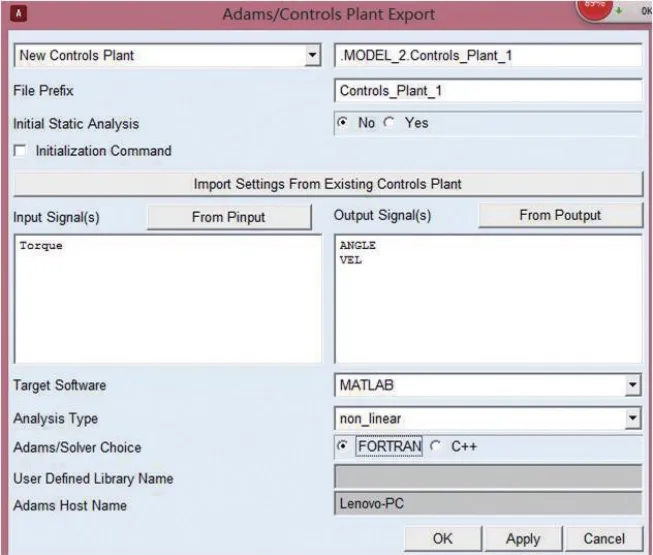
图4 系统的输入变量和输出变量
2.3 导入ADAMS软件模型
在MATLAB软件的命令窗口中运行xx.m和adams_sys命令将ADAMS软件模型导入到MALAB软件的控制模型中,如图5所示。其中,S-Function方框表示ADAMS软件模型的非线性模型,即进行动力学计算的模型;State-Space表示ADAMS软件模型的线性化模型,adams_sub包含非线性方程,也包含许多有用的变量;从adams_sub中可以看出,系统有1个输入量及2个输出量。

图5 ADAMS软件模型
3 系统联合仿真
3.1 建立速度环仿真控制模型
以转台的俯仰角度控制为例,采用PI控制算法实现转台俯仰角度的准确位置控制。要实现对俯仰角度的准确位置控制,首先要对系统的内环,即速度环PI参数进行调试,建立系统的速度环控制模型,如图6所示。

图6 系统的速度环PID控制模型
经过不断的调整,PI参数完成对速度环的准确控制,实验结果如图7、图8和图9所示,设置仿真时间为0.4s,目标速度为-10°/s。可以看出,系统在P= -500、I=25时,稳态误差和响应时间较好。
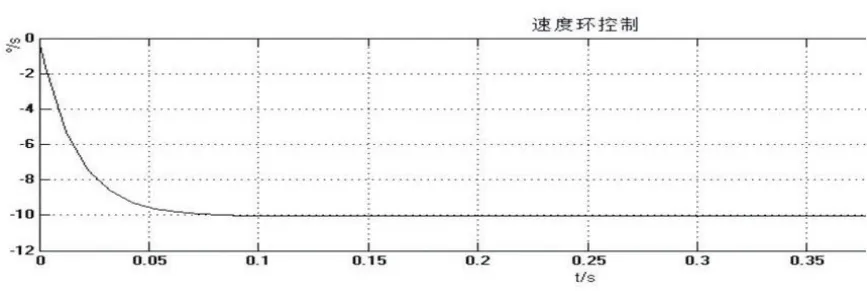
图7 P= -500,I=25

图8 P= -300,I=25
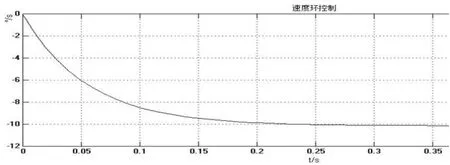
图9 P= -150,I=25
3.2 建立位置环仿真控制模型
速度环是系统的内环,位置环是系统的外环,在速度环模型的基础上,建立系统的位置环PI控制模型,如图10所示。通过速度环的调试,最终选取速度环的控制参数P为-500,I为25。

图10 位置环PI控制模型
经过不断的调整,PI参数完成对位置环的准确控制,实验结果如图11、图12和图13所示,设置仿真时间为0.4s,目标位置为30°。可以看出,系统在P=30,I=1时,虽然响应较快,但存在超调现象;P=10时,系统响应较慢;综合比较,最终控制参数选取P=20,I=1。
5 结 论
通过ADAMS软件机械系统模型和MATLAB软件控制模型的建立,实现了2个软件的联合仿真,提高了设计效率,降低了开发成本,其机电一体化系统的整体性能也得到了优化,为实际系统的调试提供了理论依据,能够更好地解决调试中遇到的各种问题。

图11 P=30,I=1

图12 P=20 ,I=1

图13 P=10 ,I=1
1 郑建荣. 虚拟样机技术入门与提高[M]. 北京: 机械工业出版社, 2005
2 周渊深. 交直流调速系统与MATLAB仿真[M]. 北京: 中国电力出版社, 2003
3 张琛. 直流无刷电动机原理及应用[M]. 北京: 机械工业出版社, 2001
Combined Simulation of Turntable System Based on ADAMS and MATLAB
Wang Huibin Zhao Haina Zheng Huashan
(Beijing Aerospace GuangHua Electronics Technologies Limited Corporation, Beijing 100854)
At present, the study of the turntable control system usually performs like this: establish the mathematical model first, and then, the simulation analysis is executed in MATLAB software. However, the mathematical model is always greatly different from actual conditions, which leads to the inaccuracy of the control model. The simulation models of mechanical system and control model of the turntable system are established by ADAMS software and MATLAB software respectively, and then the co-simulation technology is performed here with ADAMS and MATLAB. The co-simulation results show that the control accuracy and the design efficiency can be improved greatly. In addition, the co-simulation method has provided a theoretical reference for system debugging in practice.
System simulation, PI, Speed loop, Position loop
1009-8119(2015)03(1)-0056-03
