动力驱动CAN总线故障诊断测试与分析
2015-01-03李臻
李 臻
(四川交通职业技术学院,四川 成都 611130)
动力驱动CAN总线故障诊断测试与分析
李 臻
(四川交通职业技术学院,四川 成都 611130)
本文以一汽-大众迈腾的驱动CAN数据总线为例,阐述了驱动CAN总线结构与工作原理,分析了驱动CAN数据总线检测手段与方法;通过一汽-大众专用诊断仪VAS6150以及测试工具VAS6356,进行了驱动CAN系统数据总线断路、短路的诊断测试和分析。
一汽-大众;驱动CAN总线;故障诊断
CLC NO.: U463.6 Document Code: A Article ID: 1671-7988(2015)04-87-06
前言
随着用户对车的安全性和舒适性要求越来越高,以及排放法规及环保的要求越来越严格,各汽车生产厂商在汽车上安装越来越多的电器部件,比如传感器、控制单元与执行元件等,各电器、电子部件之间需要进行实时、高速、大量的信息交换。同时为了提高数据传输时可靠性及安全性,减少插接器和导线数量,降低所需空间及整车重量,越来越多的数据总线开始在汽车上的大量应用。
然而,数据总线的应用对汽车维修人员提出了更高的维修技术要求,是当前汽车机电维修技术人员面临的一大难题。CAN总线类型因各厂家和产品而异,在大众汽车上,一般分为驱动CAN系统总线、组合仪表CAN和诊断CAN等高速总线(500kb/s)以及舒适和信息娱乐系统CAN等低速总线(100kb/s),各系统之间通过CAN数据总线进行数据交换,在大众迈腾汽车上,还有大众公司内部的自总线。为了能适应汽车CAN总线这一新技术的发展,汽车维修人员必须掌握汽车CAN总线网络系统的结构组成、工作原理、故障特点及诊断方法。该文以一汽-大众迈腾的驱动CAN数据总线为例,对大众汽车驱动CAN数据总线进行诊断测试与分析,为汽车维修技术人员提供一定参考。
1、一汽-大众驱动CAN的结构特点
1.1 驱动CAN总线工作原理
为提高数据传输的可靠性,CAN数据总线系统使用两条导线(双绞线)分别用于传递不同的数据,这两条导线分别成为CAN-High(以下简称CAN-H)线和CAN-Low(以下简称CAN-L)线。
以驱动CAN数据总线为例,在隐性状态和显性状态之间进行转换时,CAN导线上的电压会发生变化。在静止状态时,在CAN-H线和CAN-L上作用有相同的约为2.5V的预先设定电压,该值称为静电平。静电平也称为隐性状态,在此总线上连接的所有控制单元均可修改它的状态。
当CAN总线从隐性转状态为显性状态时,总线上的电压值会变化(对驱动CAN数据总线来说,这个值至少为1V),CAN-H线上的电压值会升高,约为3.5V,而CAN-L线上的电压值会降低,约为1.5V,如图1所示。通过示波器测得正常工作状态下的驱动CAN总线的波形如图2所示。
控制单元是通过收发器联接到CAN驱动总线上的,在这个收发器内有一个接收器,该接收器是安装在接收一侧的差动信号放大器。差动信号放大器用于处理来自CAN-High线和CAN-Low线的信号,除此以外还负责将转换后的信号传至控制单元的CAN接收区。这个转换后的信号称为差动信号放大器的输出电压。差动信号放大器用CAN-High线上的电压(UCAN-High)减去CAN-Low线上的电压(UCAN-Low),就得出了输出电压,如图3所示,用这种方法可以消除静电平(对于CAN驱动数据总线来说是2.5V)或其它任何重叠的电压。
1.2 一汽-大众迈腾驱动CAN控制单元网络连接
一汽-大众迈腾所采用驱动CAN数据总线的速率为500 kBit/s,用于将驱动CAN数据总线方面的控制单元联成网络。驱动CAN数据总线上控制单元有:发动机控制单元、ABS控制单元、电动转向助力控制单元、自动变速器控制单元、安全气囊控制单元、电子驻车控制单元等其他控制单元,其控制单元在车上的安装位置如图4所示,控制单元之间呈树形连接,这在CAN标准中是没有的,这个特点使得控制单元布线更加完美,其中控制单元连接的拓扑结构如图5所示。
1.3 一汽-大众迈腾驱动CAN系统的结构特点
最初的数据总线的两个末端有两个终端电阻,相比之下,一汽-大众迈腾使用的是分配式电阻,即发动机控制单元内的“中央末端电阻”和其它控制单元内的高欧姆电阻。这样会产生很大的影响,但由于轿车上的数据总线不很长,所以不会有什么负面作用。CAN标准中有关数据总线长度的规定就不适用于大众集团的驱动CAN数据总线了。
在大众汽车上,发动机控制单元内部在驱动CAN数据总线的CAN-H线和CAN-L线之间形成66Ω的电阻,驱动CAN总线上其它控制单元均在该总线上的形成2.6KΩ的电阻,如图6所示。由于不同的车型所连接控制单元的数量有所差异,连接在驱动CAN总线上的所有控制单元形成的总电阻约为53~66Ω。在15号供电线(点火开关)已切断的条件下,就可以直接用欧姆表测量CAN线之间的电阻值。
2、故障检测与排除方法
2.1 汽车CAN总线的故障原因
一般说来,有3种原因会导致汽车多路信息传输系统故障:一是汽车电源故障;二是汽车节点故障;三是汽车链路故障。
CAN总线故障形式主要有CAN-L-断路、CAN-H断路、CAN-L对正极短路、CAN-H对地短路、CAN-L对地短路、CAN-H对正极短路和CAN-H和CAN-L短路共7种故障。于是就有一个ISO故障表, ISO是“International Organisation for Standardization”(国际标准化组织)的缩写,如表一所示。这张ISO故障表中包括了CAN数据总线可能出现的故障,在实际工作中,即使在本不该出现时,这种情况也可能突然出现。
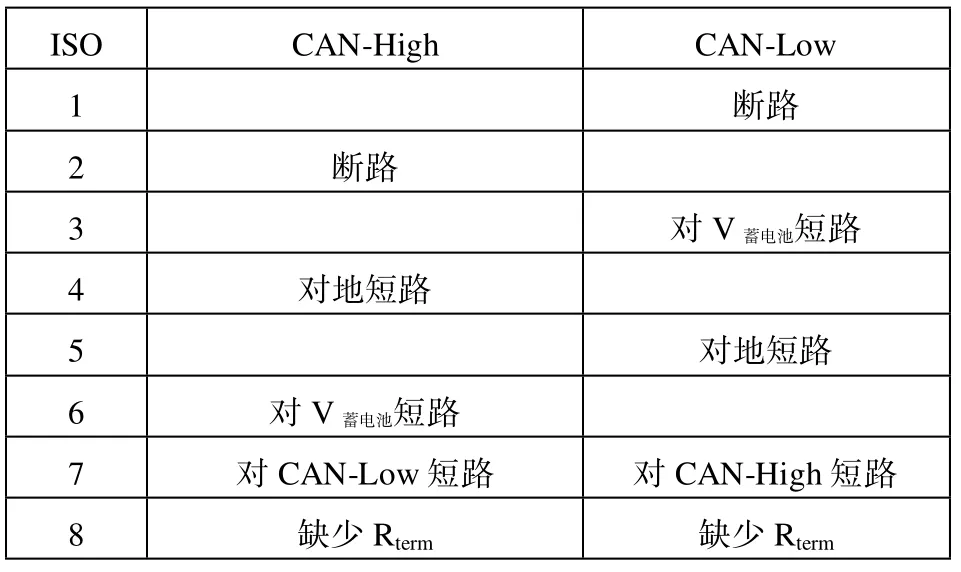
表一 CAN线故障表
其中,对于故障1和2必须用数字存储式示波器(DSO)来判断,故障3-8在驱动CAN数据总线上可以用万用表/欧姆表来准确检查判断,而故障8只能出现在驱动CAN数据总线上。
2.2 汽车CAN总线的检修方法
对于安装有驱动CAN总线的车辆出现故障时,维修技术人员首先应检测驱动CAN总线是否正常。因为如果驱动CAN总线有故障,则需要通过驱动CAN总线传输的有些信息将无法传输,使得接收这些信息的电控模块将不能接受信息,导致电控模块无法正常工作,从而为故障诊断带来困难。对于CAN总线系统故障的维修,应结合具体结构和具体控制回路分析。
(1)波形测量
利用VAS6356上的示波器便可测量CAN-H和CAN-L的波形,该示波器有DS01和DS02两个通道,这样就可以在同一屏幕上同步显示CAN-H和CAN-L的波形,便能对波形进行很直观比对并分析系统出现的问题。测量时,一般将通道DS01的红色测量端子(正极)接CAN-H线,将通道DS02的红色测量端子接CAN-L线,二者的黑色测量端子同时搭铁。驱动CAN总线仅能有2种工作状态,隐性和显性状态,在隐性电位时(逻辑值为1),两数据线上电压值很接近,均约为2.5V;在显性电位时(逻辑值为0),CAN-H电压值上升,而CAN-L电压值下降,但CAN-H与CAN-L的差值约为2.0 V,并有100 mV左右的差异。在实际检测中根据示波器测得的波形可以迅速判定总线系统的故障部位。
(2)终端电阻的测量
由于大众驱动CAN带有终端电阻的控制单元是并联连接的,所有控制单元形成的总电阻为53~66Ω,在总的阻值被测量后,如果将驱动CAN总线上的其中一个控制单元插头拔下,测量的阻值发生变化,则说明该控制单元接入到驱动CAN总线上。如果在拔下控制单元插头后,测量的阻值没有发生变化,则说明系统中存在故障,可能是被拔下的控制单元终端电阻损坏或是CAN数据线出现断路。如果在拔下控制单元后显示的阻值变化无穷大,则可能是连接中的控制单元终端电阻损坏,或是该控制单元的CAN数据线出现故障。
(3)通过测量数据块读取CAN总线通讯状态
在将VAS6150接到网关上后,可以通过VAS6150的主菜单使用功能19(网关)来查看故障记录。在网关菜单中可通过选择08来查看相关数据块,随后必须输入想要查看的相关数据块的号码,如表二所示。如果某控制单元显示状态1,表示正在被执行自诊断的控制单元上接收信息;如果显示0,则表示正在被执行自诊断的控制单元没有从该控制单元上接收信息,在网关菜单中可通过选择相应测量数据块,随后选择想要查看的测量数据块的号码。

表二 从网关读取控制单元工作状态
注意:具体情况可能与上表格所示不同,请注意显示组的文字说明,必要时选择其它显示组。
故障记录并不能说明数据总线有某种故障,控制单元损坏也会产生与数据总线故障相似的影响。只有读出网关内存储的故障记录才能为故障查询提供必要的帮助。对于驱动CAN数据总线来说,可以用Ω表来检查CAN数据总线,任何时候均可使用VAS6356上的数字存储式示波器(DSO)。
驱动CAN数据总线上最常见的故障可以用VAS6356上的万用表/欧姆表来诊断,当然,有些故障须使用VAS6356上的数字存储式示波器(DSO)来判断。
2.3 驱动CAN总线故障排除流程
(1)用VAS6150对CAN 驱动数据总线进行故障查询,如图7所示。
(2)用VAS6150与欧姆表对驱动CAN数据总线进行故障查寻。
使用VAS6356或万用表/欧姆表的故障查寻方法,如图8所示。
3、故障测试与分析
当故障存储记录中出现“动力总线故障”时,用VAS6356的DSO进行测量时必要的,可以确定故障点的位置以及引发故障的原因。在用示波器对CAN总线进行波形测试时,CAN-H 和CAN-L 的初始电压应均为2.5 V,由于总线传输速度很快,CAN-H和CAN-L隐性状态下的信号摆幅在0.05 ms/格视图下被缩短显示,在多数据块视图下,仅对CAN-H和CAN-L的对称性及信号的倒镜像性进行分析。
3.1 驱动CAN-L断路
由于电流无法流向中央终端电阻以通过CAN-H线,如图10所示,因此两条导线上的电压均接近5V。如果还有其他控制单元在工作,那么图中显示出的电平就与CAN-L线上的正常电压一同在变化。从测试波形(如图9所示)可以看出:CAN-H与CAN-L信号的隐性电平都为2.5 V,显性状态下CAN-H信号的电压值约为3.5V,为正常波形;CAN-L信号的电压值约为3 V,为异常波形。由此可以判定CAN-L导线断路。分析过程:驱动CAN-L断路,但CAN-H和CAN-L相互绞在一起,相互感应产生叠加波形,比正常波形要高。
3.2 驱动CAN-H断路
由于电流无法流向中央终端电阻以通过CAN-L线,如图12所示,因此两条导线上的电压均接近1V。如果还有其他控制单元在工作,那么图中显示出的电平就与CAN-H线上的正常电压一同在变化。从测试波形(如图11所示)可以看出,CAN-H与CAN-L信号的隐性电平都为2.5 V,显性状态下CAN-H信号的电压值约为2.3V,为异常波形;CAN-L信号的电压值约为1.5 V,为正常波形。由此可以判定驱动CAN-H断路,但CAN-H 和CAN-L相互绞在一起,相互感应产生叠加波形,比正常波形要高。所以由于某驱动控制单元CAN -H断路,导致驱动CAN中波型正常波形与不正常波形同时存在。
3.3 驱动CAN-L对正极短路从测试波形(如图13所示)可以看出,CAN-H线上的电压位于12V,CAN-L线的隐性电压也位于12V。这是由于控制单元收发器内CAN-H和CAN-L的内部连接关系引起的,如图14所示。
3.4 驱动CAN-H对地短路
从测试波形(如图15所示)可以看出,CAN-H线的电压位于0V,CAN-L线上的电压也位于0V,但在CAN-L线上还能够看到一小部分的电压变化,CAN-H对地短路示意图如图16所示。
3.5 驱动CAN-L对地短路从测试波形(如图17所示)可以看出CAN-L线的电压大约为0V,CAN-线的隐性电压也被降至0V,驱动CAN-L对地短路示意图如图18所示。
3.6 驱动CAN-H对正极短路从测试波形(如图19所示)可以看出,CAN-H线上的电压位于12V,CAN-L线的隐性电压也位于12V。这是由于控制单元收发器内CAN-H和CAN-L的内部连接关系引起的,如图20所示。
3.7 驱动CAN-H与驱动CAN-L互相短路
Testing and analysis for driving CAN bus fault diagnosis
Li Zhen
(Departmet of Automobile Engineering,Sichuan Vocational and Technical College Communications,Sichuan Chengdu 611130)
The article describes the drive CAN bus structure and working principle, analysises the means and methods to test the driving CAN data bus,taking the magotan of The FAW-VW for example. driving system CAN data bus is tested and analysised open circuit, short circuit diagnostic By FAW-Volkswagen special diagnostic and testing tools VAS6150 and VAS6356.
FAW-VW; Driving CAN Data Bus; Fault Diagnosis
U463.6
A
1671-7988(2015)04-87-06
李臻,讲师,就职于四川交通职业技术学院汽车工程系,主要从事汽车电器方面教学与研究。
