类四足移动机构的腿杆关节驱动力矩分析
2015-01-03孙应秋汪永明
孙应秋,汪永明
(安徽工业大学机械工程学院,安徽马鞍山243032)
类四足移动机构的腿杆关节驱动力矩分析
孙应秋,汪永明
(安徽工业大学机械工程学院,安徽马鞍山243032)
根据二级半转机构原理设计1种新型类四足移动机构,该机构主要由车体支架、轮腿和轮腿支架三部分组成,其轮腿的各腿杆关节采用舵机直接驱动。针对该类四足移动机构的平地行走、垂直越障和原地转向运动的典型工况,建立相应的腿杆坐标系,分别对其轮腿的一级转臂、二级转臂和跨步杆进行受力分析,基于动静法建立相应的力学模型,并对各驱动关节所需驱动力矩进行仿真。仿真获得不同工况下轮腿机构各腿杆关节驱动力矩变化曲线,其中腿杆关节所需驱动力矩的最大值为0.645 5 N·m,通过计算得出原地转向时转向舵机所需驱动力矩为0.177 0 N·m。这些数据为以后驱动舵机的选型设计提供参考依据。
类四足移动机构;腿杆;驱动力矩;舵机
四足机器人具有机构简单、灵活和稳定性好等特点,一直是国内外腿式机器人研究重点。国外典型代表有日本的Roller-Walker[1],德国的BISAM[2]及美国的BigDog[3]等。国内学者,如北京航空航天大学陈浩等[4]设计车身宽窄可变的轮腿结合式机器人,山东大学马宗利等[5]设计了可以稳定行走的内膝肘式四足机器人,上海大学赵娟等[6]提出基于间歇槽轮机构和摇杆滑块串联组合结构的轮-腿式移动机器人,吉林大学魏巍等[7]研究了能够适应复杂地形的2DOF的铰接车,清华大学郭丽峰等[8]提出具有较强的非结构环境适应能力的轮腿式变结构移动机器人。上述这些机器人均具有较好的地面适应性,但是机构及且其步态规划相对复杂。安徽工业大学余晓流等[9]提出了能够实现步行效果的二级半转机构,并设计二级半转轮腿机构月球探测车;王孝义等[10]基于二级半转机构提出1种新型双足步行机构。基于二级半转机构设计的探测车和移动机构都是通过齿轮进行传动,由于齿轮传动的齿侧间隙影响,腿杆的传动精度有待提高。为了提高轮腿机构各腿杆的传动精度,使轮腿结构更加紧凑,设计1种新型的类四足移动机构,针对类四足移动机构的平地行走、垂直越障和原地转向3种典型工况,开展各腿杆的受力分析与建模研究,对各腿件关节所需驱动力矩进行分析。
1 类四足移动机构原理
类四足移动机构主要由车体支架、轮腿和支架组成,原理图如图1。其中,轮腿基于二级半转机构的运动原理,由一级转臂、二级转臂和前后2个跨步杆组成,各腿杆之间通过转动副连接,各转动关节均采用舵机直接驱动控制。类四足移动机构中各跨步杆的转速相同,同侧两跨步杆之间的角度始终为90°。一级转臂、二级转臂和跨步杆以4:2:1的转速旋转,即当一级转臂绕其与轮腿支架连接点旋转θ角时,二级转臂相对一级转臂反向旋转θ/2角,跨步杆相对二级转臂同向旋转θ/4角,机构同侧跨步杆交叉着地完成步行动作。轮腿支架上端与车体支架通过转动副连接,通过转向舵机驱动轮腿支架原地转动,实现类四足移动机构的转向控制。
2 类四足移动机构各腿杆驱动力矩
2.1 平地行走时的驱动力矩
2.1.1 平地行走时的运动分析
类四足移动机构为对称结构,故以单侧轮腿结构为对象进行分析,其平地行走时的3种典型位姿如图2。其中图2(a)为移动机构的初始位置,其一级转臂相对于水平地面处于垂直位姿,二级转臂处于水平位姿,前后跨步杆分别处于135°和45°的倾斜位姿。由于1次跨步时只有前跨步杆与地面接触,故在平地行走运动时只对前跨步杆、一级转臂和二级转臂进行研究。
类四足移动机构单侧轮腿连杆模型如图3,前跨步杆的端点为坐标原点O,移动机构的前进方向为x轴正向,两前跨步杆端点的连线为y轴方向,采用右手定则建立全局坐标系。根据二级半转机构的运动原理,设一级转臂转过θ,则二级转臂和跨步杆分别转过θ/2,θ/4。当一级转臂转过2π角度时,类四足移动机构正好完成1次平地跨步动作。
图3中:A是轮腿支架与一级转臂的连接点;B,C,D,E,F分别是一级转臂、二级转臂、跨步杆3,4及轮腿支架的质心;O为坐标原点;θ1,θ2,θ3,θ4分别为一级转臂、二级转臂、跨步杆3,4与x轴正向夹角。根据建立的坐标得各点的位置方程如下:
其中:l1,l4分别为一级转臂、轮腿支架长;l2,l3分别为二级转臂、跨步杆半长;d为杆件宽度;θ1=π/2-θ;θ2=π-θ/2;θ3=3π/4-θ/4;θ4=π/4-θ/4。
2.1.2 平地行走时各腿杆的受力分析
文中:Faix为第i腿杆在x方向的惯性力;Faiz为第i腿杆在z方向的惯性力;Fijx为腿杆i对腿杆j在x方向上的力;Fijz为腿杆i对腿杆j在z方向上的力;aix为腿杆i在x方向的加速度;aiz为腿杆i在z方向加速度;Gi为腿杆i的重力;mi为腿杆i的质量;T1,T2分别为一级转臂、二级转臂关节所需驱动力矩;T3和T4为跨步杆关节所需驱动力矩。
移动机构平地行走时,一级转臂的受力分析如图4,忽略转动副的摩擦,由动静法可建立如下受力和力矩平衡方程
由动静法可得如下受力和力矩平衡方程
移动机构平地行走时,跨步杆的受力分析如图6,由动静法可得如下受力和力矩平衡方程
2.1.3 平地行走仿真与分析
根据类四足移动机构的设计要求,仿真时设置其基本参数如表1。以移动机构平地行走1个跨步为仿真周期,根据受力和力矩平衡方程,通过仿真可得到各腿杆所需驱动力矩与转角θ之间的关系曲线,如图7。
由图7可知:移动机构平地行走开始时,二级转臂和跨步杆所需驱动力矩较大,随着跨步过程的进行,驱动力矩逐渐减小,当转角大于π,驱动力矩又逐渐增大;一级转臂上所需驱动力矩在1个仿真周期有2次周期性变化;跨步杆、二级转臂和一级转臂所需驱动力矩最大值分别为0.400 4,0.645 5和0.181 4 N·m。
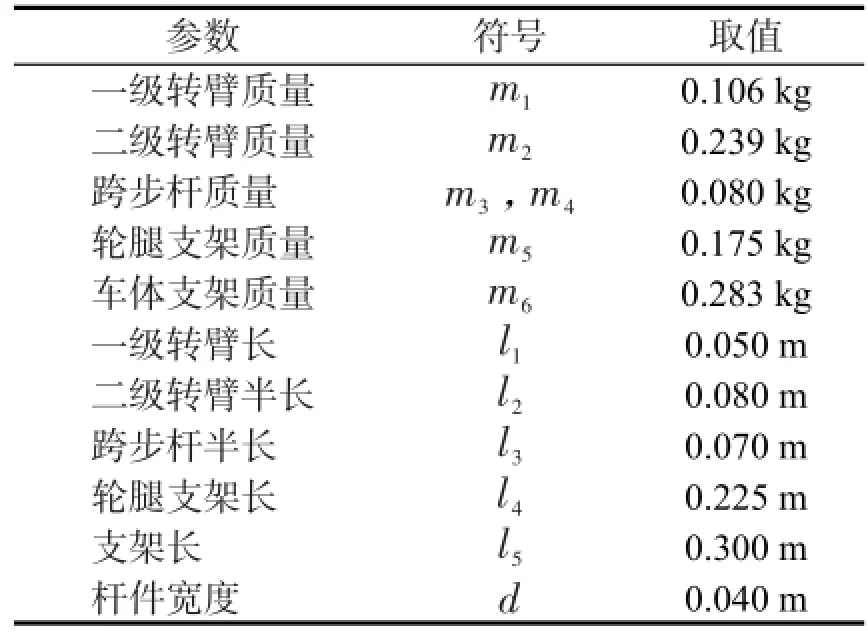
表1 类四足移动机构基本参数Tab.1 Basic parameters of quadruped-imitating walking mechanism
2.2 垂直越障时的驱动力矩分析
2.2.1 垂直越障时的运动分析
移动机构垂直障碍过程如图8,图8(a)为初始位置,其一级转臂、二级转臂和1个跨步杆相对于水平地面处于垂直位姿,另一个跨步杆处于水平位姿。当一级转臂转过3π角度时,类四足移动机构跨上障碍并达到图2(a)的位姿,将此过程视为1次完整跨障过程。越障时只对越障跨步杆、一级转臂和二级转臂进行研究。在图8(a)的位姿可得跨越高度Hmax为
将表1中的相关数值代入式(10)得Hmax≤0.21 m。
将轮腿机构简化为连杆模型,并建立坐标系,如 图9。图中所示点及角度的意义与平地行走相同。根据建立的坐标可得越障模型中原点O及A~F各点的坐标,方法如平地行走连杆模型,此处不再赘述。此模型中θ1~θ4的数值为
2.2.2 垂直越障时各腿杆的受力分析
垂直越障时一级转臂的受力分析如图10,忽略转动副的摩擦,由动静法可得如下受力和力矩平衡方程
垂直越障时二级转臂的受力分析如图11,由动静法可得如下受力和力矩平衡方程
垂直越障时跨步杆的受力分析如图12,由动静法可得如下受力和力矩平衡方程
2.2.3 垂直越障仿真与分析
仿真时的机构参数设置如表1,根据垂直越障时的受力和力矩平衡方程,通过仿真可得各腿杆所需驱动力矩与转角θ之间的关系曲线,如图13。
对比图7,13可知,垂直越障时,跨步杆上所需驱动力矩明显增大,一级转臂和二级转臂越障过程所需驱动力矩呈周期性变化,运动周期分别为π和2π。跨步杆、二级转臂和一级转臂所需驱动力矩的最大值分别为0.566 4,0.642 8和0.181 5 N·m。
2.3 转向运动时的驱动力矩分析
类四足移动机构在跨步杆与地面垂直的位姿时转向如图14。该移动机构的转向舵机与跨步杆安装在同一轴线上,转向时采用原地转向方式,即转向时绕该轴线转动,忽略摩擦力矩的影响,此时转向舵机只需克服轮腿重力矩TG。
令单轮腿的质心为点G,GG为单轮腿重力,根据类四足移动机构平地运动建立的坐标,可求得单轮腿的质心坐标(xG,yG,zG),则轮腿重力矩TG可表示为
3 结 论
基于二级半转机构步行运动原理,设计新型的类四足移动机构,其轮腿机构的各腿杆均由舵机直接驱动控制,并通过转向舵机完成该移动机构的原地转向。对其平地行走和垂直越障运动进行分析,分别建立运动模型,并对简化的杆件模型进行受力分析,得到不同工况下的力学模型。通过仿真得到腿杆关节所需驱动力矩的最大值0.645 5 N·m,并通过计算得出该机构原地转向时转向舵机所需驱动力矩值0.177 0 N·m,所得数据为后续舵机选型提供理论参数。
[1]Hirose S,Takeuchi H.Study on roller-walk(basic characteristics and its control)[C]//Proceedings of 1996 IEEE International Conference on Robotics andAutomation.Minneapolis,IEEE,1996:3265-3270.
[2]Berns K,Ilg W,Deck M,et al.The mammalian-like quadrupedal walking machine BISAM[C]//5th International Workshop on Advanced Motion Control.Coimbra,IEEE,1998:429-433.
[3]Raibert M,Blankespoor K,Nelson G,et al.Bigdog,the rough-terrain quadruped robot[C]//Proceedings of the 17th World Congress of the International Federation ofAutomatic Control Seoul.Korea,2008:10822-10825.
[4]陈浩,丁希仑.四足变结构机器人的运动学分析[J].北京科技大学学报,2012,34(1):53-57.
[5]马宗利,李华,王建明,等.四足机器人结构设计与仿真分析[J].机械设计,2012,29(7):34-37.
[6]赵娟,徐子力,金海涛.一种新型轮-腿混合式移动机器人的结构设计及分析[J].机械制造,2013,51(581):7-10.
[7]魏巍,刘昕晖,姚亮,等.摆动车身车辆越障过程模型及所需最小驱动力矩[J].吉林大学学报:工学版,2012,42(2):285-291.
[8]郭丽峰,陈恳,赵旦谱,等.一种轮腿式变结构移动机器人研究[J].制造业信息化,2009,31(10):1-6.
[9]余晓流,骆辉,高文斌,等.基于半转机构的月球车及其半转机构的干涉分析[J].安徽工业大学学报:自然科学版,2008, 25(3):290-293.
[10]王孝义,周军,邱晗,等.类两足步行机构行走性能实验研究[J].安徽工业大学学报:自然科学版,2013,30(10):414-419.
责任编辑:何莉
Driving TorqueAnalysis of Leg Rod Joint of Quadruped-imitating Walking Mechanism
SUN Yingqiu,WANG Yongming
(School of Mechanical Engineering,Anhui University of Technology,Ma'anshan 243032,China)
A new kind of quadruped-imitating walking mechanism was designed according to the principle of double-half-revolution mechanism.It is mainly composed of three parts,such as body bracket,wheel leg and wheel leg stand,and each leg rod of the mechanism is driven directly by steering engine.The corresponding leg rod coordinate systems are established in three typical conditions:walking on flat ground,vertical obstacle and pivot turning movement.Mechanics analysis is done on each link of the wheel leg,and the mechanical model based on dynamic-static method is established.The driving torque curves of each leg rod under different conditions are obtained through simulation analysis,and the maximum driving torque is 0.645 5 N·m.By calculating,the required driving torque of steering engine for turning is 0.177 0 N·m.The results provide a reference basis for the steering engine lectotype design in the future.
quadruped-imitating walking mechanism;leg rod;mechanics analysis;driving torque;steering engine
TP242.3
A
10.3969/j.issn.1671-7872.2015.01.006
2014-09-10
国家自然科学基金项目(51051001);教育部高校科技创新工程重大项目培育资金资助项目(708054)
孙应秋(1989-),女,安徽滁州人,硕士生,研究方向为先进制造理论及技术。
汪永明(1971-),男,安徽绩溪人,博士,教授,主要研究方向为制造业信息化技术,机器人及检测技术。
1671-7872(2015)-01-0027-06
