防抱死制动系统对SUV车辆操控稳定性仿真分析
2015-01-03朱崇敬郭朋彦张瑞珠冯金泉马付屹
朱崇敬,郭朋彦,张瑞珠,冯金泉,马付屹
(华北水利水电大学 机械学院,河南 郑州 450045)
防抱死制动系统对SUV车辆操控稳定性仿真分析
朱崇敬,郭朋彦,张瑞珠,冯金泉,马付屹
(华北水利水电大学 机械学院,河南 郑州 450045)
针对SUV车辆在制动情况下出现的操纵性和稳定性变差现象,在CarSim软件中建立了SUV车辆动力学模型,在对开的路面对行驶的紧急制动工况进行了仿真,初步发现防抱死系统对该工况下车辆操纵稳定性的影响最大,为进一步验证,与Simulink结合建立了整车联合仿真模型,将Carsim中SUV制动过程中的制动压力导出至Simulink模型作制动仿真测试,进一步描绘出车轮侧偏角、横移角速度和偏移位移等影响操纵稳定性的参数数值变化曲线,通过分析对比,确定了紧急制动条件下为SUV车辆加装防抱死系统能达到提高操纵稳定性的目标,最终达到安全驾驶的目的。
CarSim;SUV;Simulink;操纵稳定性;联合仿真
CLC NO.: U467 Document Code: A Article ID: 1671-7988(2015)01-116-04
前言
运动型多用途汽车(SUV)具有良好的动力性和较大的乘坐空间,所以随着人们生活水平的提高,逐渐获得了较高的市场占有率。然而,随着汽车行驶速度的逐渐提高,汽车的行车安全性逐渐引起人们的重视,而汽车的操纵稳定性对车辆高速行驶安全性有主要的影响作用。
SUV由于有良好的越野通过能力,底盘离地间隙较大,因此该型汽车在高速行驶遇突发事件需紧急制动时,极易出现侧倾、滑移等危险现象,严重时会出现侧翻等安全事故[1]。而德国的Bosch公司推出的ABS(防抱死系统)能帮助汽车在制动时有效地将制动力调节至适应轮胎-地面所能提供的附着力,防止车轮在紧急制动情况下出现抱死,从而提高车轮的制动稳定性,SUV型轿车相对于普通乘用车重心更高些,高速行驶时更易出现危险工况,因此在紧急制动工况下的安全性更需要进一步进行分析。本文基于CarSim平台建立SUV整车动力学模型来模拟车辆以一定时速制动时的运行工况,同时与Simulink建立联合仿真模型,将CarSim输出制动压力值发送至Simulink从而反映到制动时车速的变化以及车辆横移角速度、侧偏角和侧偏位移等影响车辆操纵稳定性参数的变化,通过对比制动工况下有无ABS对这些参数变化的影响,最终确定ABS对SUV车辆紧急制动时操纵稳定性具有极大的改善作用。
1、CarSim整车模型
CarSim是国内外汽车主机厂普遍采用的一款商业化车辆动力学仿真软件,它在车辆整车建模方面具有参数化、简洁化、智能化等优点,广泛应用于汽车整车和子系统研发部门,像Bosch、福特、本田、丰田、铃木,沃尔沃等。采用CarSim建模时,用户只需通过一个简单友好的GUI界面就能根据整车模型参数轻松建立所需的整体车辆模型;它可以设置一定的仿真参数模拟整车在道路的行驶过程,以三维仿真动画和动态输出曲线的形式响应仿真参数的变化过程。该软件通过建立的整车模型,设定一定的工况,并且模拟道路行驶实验,可以对车俩的相关性能指标进行检验,如动力性,燃油经济性,制动性,操纵稳定性以及平顺性等[2]。
CarSim以参数化形式进行简化建模,其中涵盖了汽车的各个子系统,如动力系统、制动系统、转向系统、悬架、车轮轮胎等,在进行分析时把空气动力学,路况信息等影响因素包括在内,在一个三维的虚拟场景里对汽车建立坐标系进行离线仿真分析,即以下做的整车仿真分析过程是一种可视化仿真过程[3],形象逼真。下图为SUV部分参数模型:
本文研究的是车辆路面附着系数较低且出现分隔开的摩擦系数工况下SUV车辆的制动情况,在此仿真过程中车辆会出现危险状况如侧滑和甩尾等,通过对比安装有ABS和无ABS两种情况下车辆侧偏角、横移角速度和偏移位移等参数的变化来分析汽车的操纵稳定性的差别。运用CarSim软件来仿真这些危险工况,相比实车测试更节约时间和费用成本,安全性更好,测试的重复度更好。
另外,CarSim软件对于制动轮胎模型的建立表现的很精确,对4个轮胎可以实现差动制动控制[4],而且还可以分别针对每个轮胎的运行工况做出仿真曲线,通过结合每个轮胎的工作曲线并做一定的对比来反应相关参数的变化,从而推断出车辆在制动工况中整个运动过程。另一方面,在与Simulink软件建立联合仿真的过程中,利用CarSim导出四个车轮的制动压力的数据,然后通过像差动制动ABS制动控制策略一样来改变汽车的运动状态,进而对汽车进行稳定性控制[5,6,7]。本仿真中选择的路面工况是对开的冰面,这是由于路面附着系数较低时,对汽车的稳定性控制才显得更加重要,同时仿真结果更加直观明显。
2、建立联合仿真模型
在CarSim中设置的车辆仿真参数如表1所示。定义了SUV车辆制动前系统的一些仿真参数,如初始车速和开环的节气门开度,制动压力的变化过程,转向系统和闭环控制转向位置以及其它额外数据等[8]。
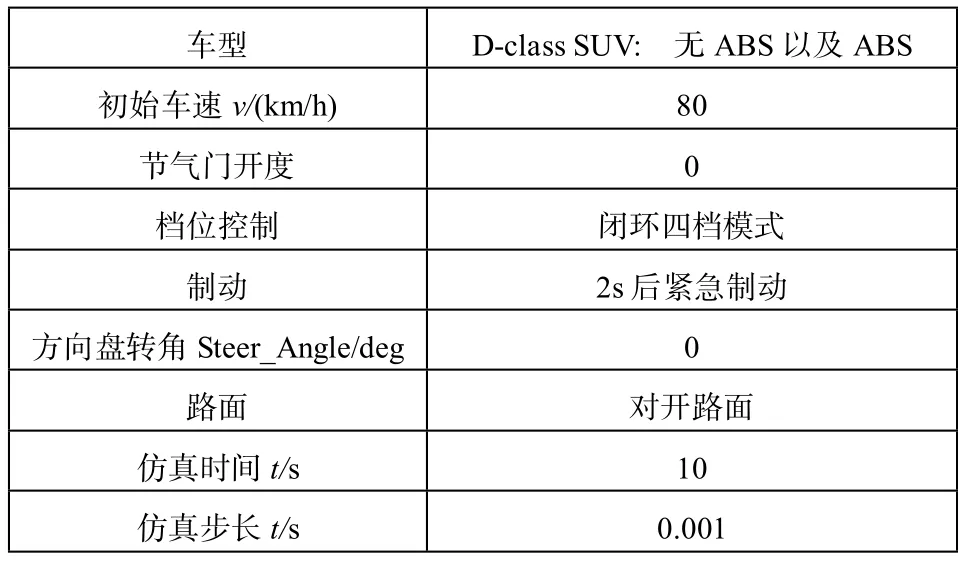
表1 车辆仿真参数
整车在冰面的滑移率 s 计算的准确性将直接关系到整个仿真正确性,滑移率的定义公式为:
式中,v——车轮中心的速度(m/s);r——车轮的滚动半径(m);ω——车轮转动角速度。并且定义车轮纯滚动时,s=0;纯滑动时,s=100%。
车辆在紧急制动工况下,整车的运动状态需要通过车速以及车轮转速来确定,而这两个参数值与车轮的制动状态相关,即由车轮上制动液压缸的工作状态最终决定。因此,在CarSim与Simulink建立联合仿真模型后,输出至Simulink模型中的变量依次定义为:Vx_L1(左前轮速/(km/h))、Vx_R1(右前轮速/(km/h))、Vx_L2(左后轮速/(km/h))、Vx_R2(右后轮速/(km/h))、Vx_SM(汽车质心处的速度/(km/h))、Pbk_Con(主缸压力的控制输入/MPa)。在Simulink中设置车辆制动过程中ABS控制策略,结合控制程序运行仿真过程,从而得到紧急制动过程中整车的运动状态,整车联合仿真模型如图 3 所示[9,10]。在制动过程中车轮受到液压缸产生的制动力矩,要防止车轮抱死,即控制该制动力矩的数值变化。
3、仿真结果
利用CarSim建立的 4 轮SUV整车动力学模型,与Simulink 建立的防抱死制动的控制策略相集成,组成一个联合仿真模型。联合仿真测试的具体图形及曲线如图4~图8所示。
图4中反映出装有防抱死装置的车辆在制动情况下行驶路径有稍微偏移,但不影响安全行驶,而无ABS的SUV突遇紧急制动时会出现滑移,易出安全事故。
从上图可以看出,有无防抱死装置对于车辆质心的速度有很大的影响作用,无ABS装置的车辆在制动时会在摩擦分离路面上产生滑移,反映到曲线上就是车辆质心的速度包括各个轮胎是上下跳动,呈非线性降速,导致汽车无法操纵,同时稳定性较差,极易出现安全事故;而加装防抱死装置的汽车在制动情况下车速均匀变化,几乎成线性减速,车辆的操纵稳定性较好,是我们需要的制动情况下的工况。
图6中反映出制动过程中有ABS时车辆的横移角速度几乎变化不大,无防抱死装置时车辆横移角速度最高可达150deg/s,当然该值随着制动时车速的变化而变化。
图7反映出有ABS时车辆制动时车轮轮胎的侧偏角在4~5度之间,这是由于仿真测试时左侧车轮与右侧车轮行驶路面的附着系数不同(冰面和正常路面),车轮侧偏角会有稍微变化;而无防抱死装置从开始制动车轮侧偏角就一直在变化,最大可达到将近90度,从而反映出无ABS的车辆紧急制动时已经失稳,操纵性较差。
上图反映出有ABS时车辆制动过程中偏移原始路径的位移很小,几乎是一条直线,而无防抱死装置的车辆制动时出现滑移,偏离正常行驶路径达到6米,反映出汽车已经严重偏离行驶路面。
结合两个软件联合仿真得到车辆在紧急制动工况下车速、横移角速度、侧偏角以及偏移位移等参数的变化曲线,数据表明在无防抱死系统时SUV制动条件下的操纵稳定性变差。
4、结论
本文通过CarSim和Simulink 联合仿真实验方法,在实验室环境下模拟有ABS和无ABS两种SUV在对开路面的紧急制动过程,得到影响操纵稳定性的多个参数变化曲线,对比分析这些曲线证明,有ABS相对无ABS对车辆操纵稳定性有极大的改善作用。
同时,本文用到的软件联合试验仿真手段,客观性地评价了车辆操纵稳定性,同时还能模拟侧滑、侧倾等危险工况,相对于道路测试车辆操纵稳定性,不仅节约了时间和金钱成本,而且测试重复度更好,总体看来,仿真分析具有实用性价值,为进一步研究汽车动力学性能提供了有效的研究手段。
[1] 余志生. 汽车理论第五版[M].北京:机械工业出版社.2010.
[2] 郭孔辉,付皓,丁海涛. 基于CarSim的车辆稳定性系统控制器开发[J].汽车技术,2008 (3):1-5.
[3] 姜立标,代攀,陈泽茂. 汽车操纵稳定性可视化仿真技术分析[J].重庆大学学报.2012.(9).
[4] 王培. 基于差动制动的汽车动力学稳定性控制策略研究[D].长沙理工大学硕士学位论文.2010.4.
[5] 唐祯,王秀颖. 汽车ABS混合仿真试验台研究[J].汽车技术.2011(10):38-41.
[6] 解龙, 陈家琪. ABS四轮车辆的Matlab/Simulink建模与仿真[J].上海理工大学学报. 2004.26(2): 164-167.
[7] 吕红明,陈南. 基于 Matlab/Simulink 的四轮转向车辆操纵稳定性仿真[J].系统仿真学报.2004.16(5):957-959.
[8] 秦东晨,潘 筱,赵红宇. 面向SUV车型操纵稳定性的多体动力学建模与仿真[J].中国机械工程,2007.18(17):2126-2130.
[9] 马史驶,陈家琪. 汽车操纵稳定性的联合仿真技术研究[J].现代制造工程.2013(4):57-62.
[10] 赵六奇,金达锋. 车辆动力学基础[M].北京:清华大学出版社.2006.
(12)将背板前倾(消除座椅靠背上的张力),然后再将背板放回座椅靠背上,该过程要使装置保持水平。将左、右两脚轮流抬离地板,直至两脚不再产生附加的牵动。完成后发现座板不水平,于是在背板顶部施加一横向力使装置座板在座椅上保持水平。
(13)拉住T形杆,使三维H点装置在座垫上不能向前滑移。
a.将背板放回到座椅靠背上;
b.在三维H点装置探测杆约为躯干重块中心高度处,交替地施加和撤去一个不大于25 N的向后水平力,直至力撤去后臀部角度量角器指示达到稳定位置[4]。
(14)在H点标记钮连线与车门内部相交的位置做好标记X1、X2,在汽车碰撞试验前安放测量假人时,使测量假人上面的H点标记钮之间的连线与直线X1X2重合。
3、总结
如果制造厂对于某些条例有特殊的要求,应该按照制造厂的要求处理。在有些测量中有人会把实际靠背角人为的调节到与设计靠背角相一致,这样的做法是错误的,在完成所有的装置安装后,实际靠背角与设计靠背角可以不一致,误差范围为5°。在步骤12调节背板过程中,装置的双脚不应有任何约束。如果双脚变动位置,暂且不必调整。在抬脚时,两脚要能自由转动,不施加任何向前或侧向的载荷。
正确测量H点位置不仅为测量假人的安装提供可靠的依据,也提升了整个汽车碰撞试验数据的可靠性与准确性。
参考文献
[1] 《测量用三维H点装置的尺寸校准技术研究》[J],陈锡林,朱凯捷,周新良,《北京汽车》,2012年05期.
[2] GB/T 11563-1995 汽车H点确定程序.
[3] GB/T 26512-2011 商用车驾驶室乘员保护.
[4] 温吾凡,《汽车人体工程学》[M],吉林科学技术出版社.
Analysis on Handling Stability Simulation of SUV at the condition of Braking based on CarSim software
Zhu Chongjing, Guo Pengyan, Zhang Ruizhu, Feng Jinquan, Ma Fuyi
(Institute of Mechanics, North China University of Water Resources and Electric Power, Henan Zhengzhou 450045)
Aiming at the phenomenon that Sport Utility Vehicles will lose its stability and the steering ability will become bad in case of Emergency Braking, CarSim software is applied to establish full vehicle dynamic model in which the whole driving process of Emergency Braking condition is simulated, preliminary finding ABS system has a big influence on handling stability at this condition. For further validating, the collaborative simulation model is set up combining Carsim with Simulink, the numeric changes of slip angle, yaw and offset can be plotted, which reflect handling stability most under the input of braking pressure. After analyzing and making comparisons about testing data, the goal of improving handling stability by installing anti-lock braking system to SUV in case of emergency braking is determined. Finally the purpose of driving safely can be met.
CarSim; SUV; Simulink; Handling stability; Collaborative simulation
U467
A
1671-7988(2015)01-116-04
朱崇敬,就读于华北水利水电大学机械学院。
河南省科技攻关项目(112102210104);河南省教育厅科学技术研究重点项目(13A460693)。
