车路协同仿真与实验系统软件开发
2015-01-02丁亚林朱云生
丁亚林 朱云生 王 斌
(重庆邮电大学自动化学院,中国 重庆400065)
0 引言
作为车联网主要组成部分,车路协同技术已经成为当今国际智能交通领域的前沿技术,车路协同技术是解决道路交通安全、提高通行效率和减少交通污染的有效途径。车路协同对车联网的发展起到关键作用,而在车路协同系统开发过程中需要将各种针对其开发的算法应用到实车测试中。但由于开发出算法的稳定性、可靠性等存在的一系列问题以及实车测试时受到的各种客观条件限制,比如车辆在高速路口时车流量较大,车辆在高速运行时车速过快等问题,使得实车测试难度增大,存在很大安全隐患。大多仿真系统只针对某一算法原理进行设计,开放性差;没有将虚拟现实技术运用到车路协同仿真中,可视化效果差;仿真程序大都针对某一特定场景进行设计,不支持多场景仿真,通用性差等。因此,开发支持多场景、多算法的车路协同仿真与实验系统具有重要意义。
1 相关技术分析
根据车路协同的仿真与实验系统的设计需求,该系统包括各个模块间接口技术,与车辆通信技术以及仿真技术以及软件设计相关技术等。
1.1 模块间接口技术
程序之间的通信有多种方式,例如动态链接库、COM技术、API技术等。动态链接库(Dynamic Link Library,DLL)是微软公司在微软视窗操作系统中实现共享函数库概念的一种方式。与DLL相比,COM技术学习难点大,不容易掌握,而且COM组件可以被重用,一个程序升级COM组件可能导致别的程序都无法使用。DLL技术具有容易掌握、扩展了应用程序特性、可以用多种编程语言、节省内存、助于解决平台差异等优点。选取DLL技术作为车路协同仿真与实验系统与各个算法模块间的接口技术,可以降低系统开发技术难度,节省开发时间以及满足系统开放性和通用性的特点。
1.2 通信技术
车路协同的仿真与试验系统的通信主要是仿真与试验系统通过无线广播的形式采集数据,采用DSRC技术。车与车,车与路测设备之间用广播通信的方式,通信协议就采用DSRC协议。DSRC即802.11p协议或WAVE(wireless access for vehicular environments)协议,DSRC通信协议依据开放系统互联体系结构(OSI)七层协议模型提出的三层的简单协议结构。
1.3 软件设计技术
本系统包括多场景设计,因此软件开发涉及到多文档(Multiple Document Interface,MDI)技术和窗口之间的继承技术。系统多窗口采用MDI设计模式,由一个主窗口和多个子窗口构成,每个场景对应相应的子窗口,子窗口与子窗口之间相互独立。每个子窗口都从父类窗口中继承产生。这种设计方式减少了大量重复性工作,提高了工作效率。
2 软件开发
2.1 软件功能分析
本系统涉及了多个仿真与实验场景,每个场景都有自己的独立特性,包括参数、报警方式等不同,同时,每个场景的整体框架基本相同,都包括运行场景、数据显示和配置参数三个部分以及一个报警区和一个状态显示条。运行场景页面显示车辆实时运行状态,数据显示页面显示在运行场景下车辆WSU接收到的原始和解析后的数据,配置参数页面用来在仿真模式时配置车辆信息,报警区包括威胁指数显示条、报警指示灯、报警闪烁图标等内容,报警时报警指示灯闪烁,报警图标闪烁并发出声音,状态显示条主要显示本车和相邻车辆的一些重要参数。
系统运行模式分为仿真模式和实验模式,仿真模式用来对报警等算法进行仿真、调试。用户可以在每个场景的配置参数页面中对车辆初始状态相应配置。仿真系统通过调用算法程序,手动配置或者从外界文件中读取参数的方式将相关数据传输给算法程序,由算法程序计算出威胁指数,报警信息等参数,并反映在仿真界面上。车辆根据配置的参数在运行场景页面的地图上行驶。实验模式主要应用于实际运行系统,获取参数的方式与仿真模式不同:参数从车辆WSU获得。程序将WSU获取的信息进行解析并显示,车辆根据解析后的数据(如经度、纬度、速度等信息)在实际地图上行驶。多个威胁参数也是由算法程序计算得出。根据需求相关内容,
2.2 软件架构搭建
本软件需要搭建多个场景的仿真与实验平台,包括是十字路口、隧道和超车换道场景等。此外,由于实际实验场景非常复杂,为了解决这一问题,软件设计了场景动态生成功能,用户可以根据需求自己搭建仿真场景,匹配相应的仿真算法。动态生成仿真场景的配置窗口的数据保存在XML文件中,每次需要生成场景时,配置窗口的数据信息通过解析XML文件获取。软件架构采用了MDI设计模式,每个仿真场景都是主窗口的子窗口,减少开发程序时的重复性工作,是设计更加灵活。每个场景都有仿真模式和实验模式。当场景选择了运行模式(仿真或实验模式)后就要对参数进行配置,参数配置方式可以有三种方式:手动配置、从文件中导入以及接受无线传输数据包。
本系统将仿真模式和试验模式搭建到同一个软件平台上,减少很多重复性工作。系统在选择场景之后就会选择运行模式为仿真模式或者是实验模式,当选择仿真模式时,数据来源有两种,一种是直接手动配置,一种是系统从外界表格中读取相关数据。实验模式的数据来源是通过无线通信和车载CAN总线获取的。明确数据来源之后就要选择相应的算法,软件采用调用动态链接库的方式调用车路协同相关算法,使得算法调用非常灵活,方便算法升级。算法输入参数即为配置参数时设置的。算法可以自动选择配置参数作为自身参数的输入。仿真场景中车辆的运行轨迹参数由配置参数确定,车辆行驶时的威胁指数和抱紧参数由威胁评估算法计算产生。场景仿真结束后,仿真算法生成的数据保存在表格中,数据保存采用OLE技术,并对实验结果数据进行分析,验证算法有效性。
软件运行场景可视化采用自己设计地图和在线调用地图(本软件采用百度地图)的方式实现。生成仿真场景后,用户可以根据自己的需要选择相应的仿真模式。仿真时,软件从相应渠道采集数据,将数据输入给仿真算法,仿真算法计算后将相应参数输出,软件根据车辆的位置、速度、转向等相关信息把相应车辆标记在仿真地图上,并实时更新。并将相邻车辆中最具威胁的车辆信息显示在软件下方的工具条上,在数据显示模块详细的显示了附近车辆的实时的相关信息,并将该信息保存下来,为实验分析提供仿真数据。
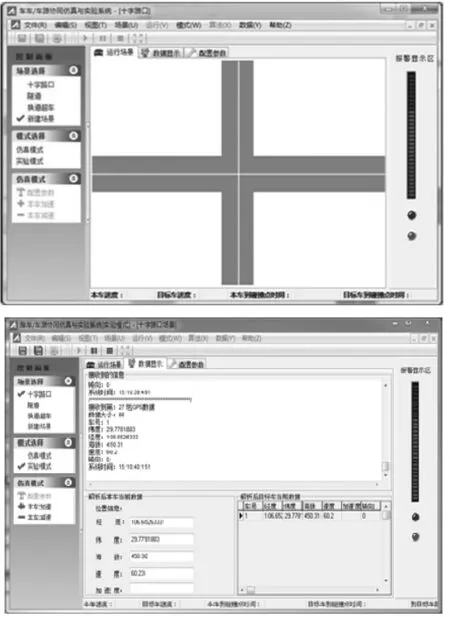
图1 仿真软件主界面及相应场景
3 系统测试验证
系统测试验证分为仿真模式测试和试验模式测试,主要包括调用算法模块测试、通信模块测试和整体功能测试。
软件是在windows操作系统下,使用C++builder集成开发环境开发的,经测试,仿真模式与实验模式地图调用正确,算法调用正确,数据保存正确,车辆显示正确,报警信息显示正确。各场景都能正常运行,动态生成场景运行正确,总体实现了车路协同仿真与实验软件开发的所有功能。本分测试如图1所示。
4 结论
大多仿真系统只针对某一算法原理进行设计,开放性差;没有将虚拟现实技术运用到车路协同仿真中,可视化效果差;仿真程序大都针对某一特定场景进行设计,不支持多场景仿真,通用性差等。本文针对以上问题开发了车路协同仿真与实验系统软件,解决了多场景多算法仿真问题。
[1]褚彤宇,王家川,陈智宏.车联网技术初探[J].交通工程,2011.
[2]董力伟.浅谈中国Telematics产业链核心环节的发展选择[J].汽车导航,2011.
[3]邓志东,余士良,程振波.通用分布式虚拟现实软件开发平台的研究[J].系统仿真学报,2008,20(12).
[4]张含,蔡伯根,上官伟,李四辉.基于多分辨率建模的车路协同系统仿真场景设计与实现[J].系统仿真技术,2013,9(1).
[5]梁忠杰,思敏,李婷.COM技术和动态链接库技术的应用研究[J].微计算机应用,2006,27(6).
