基于MATLAB的6自由度机器人假肢工作空间分析
2015-01-01朱雪梅姚有峰汪明珠
朱雪梅,姚有峰,汪明珠
(皖西学院基础实验中心传感网与信息处理综合应用创新平台,安徽 六安237012)
随着我国经济的发展,社会保障制度在逐渐得到完善,针对残疾人士的基本型辅助器具的研发也受到了重视,可替代人手的机器人假肢研究变得更加重要[1]。机器人学的研究一般在机械结构设计之初要进行机器人运动学分析,机器人运动学方程的建立是为了对所设计的结构进行数学分析,方便对机器人运动轨迹进行计算机仿真、机器人控制方程的设计以及机器人结构和运动设计的计算[2](P3-4),从而实现对机器人假肢的控制,增强控制系统稳定性,调高抗干扰能力[3]。解决机器人假肢运动学方程的主要方法有数值法和解析法,其中数值法计算方法简单,但计算速度慢,不能获得全部的解。解析法能得到所有可能的解,但是计算过程复杂。将数值法的蒙特卡洛法和计算机仿真软件MATLAB相结合,可以很好地解决机器人运动学方程解的问题。
1 建立假肢数学模型
机器人假肢主要是需要通过对机械结构的控制实现人体上下肢的基本功能,在对机器人假肢进行设计之初,要充分考虑设计所需实现的功能,根据各个杆件的结构以及自由度的数量设计出合理的假肢结构图。在机器人假肢结构图的基础上,根据各个关节参数建立其D-H坐标系,从而得到假肢运动学方程[4-6],建立机器人假肢的数学模型。对于机器人假肢控制系统的设计,则主要是在结构图及运动学方程的基础上对各个自由度及关节实现控制。
1.1 机器人假肢结构图
根据仿人形上肢的机器人上假肢的功能需求,充分考虑各个关节杆件的结构参数设计了6自由度上假肢图件,如图1所示,基础底部即肩部,又称作0杆,通过0杆将假肢与人体固定;肩部旋转构件称作1杆,通过该杆件实现人大臂的旋转功能;大臂构件称作2杆,即实现人的大臂支撑功能;小臂转动支撑称作3杆,即实现人的小臂支撑功能;小臂转动构件称作4杆,即实现人的小臂转动功能;假手构件称作5杆,即实现人的手部功能。该机器人上假肢包括6个自由度,其中5个是运动自由度,1个是手部局部自由度。根据其结构与动作特性,其各种参考如图1所列,其中a图是正视图,b图是侧视图。
1.2 建立D-H坐标系
6自由度机器人假肢运动学主要研究机器人假肢的运动,包括上假肢的各个手部杆件机构姿态以及各个关节运动角度等运动的学科[7](P98-100),在已知机器人假肢的所有连杆长度和关节角度等的基础上,计算出机械结构末端手部的位姿[8](P49-50)。如果想要实现假肢手部末端抓取物体的功能,即控制手部末端到期望的位置,并且实现抓取及其他相关动作,则必须知道假肢的连杆长度和各个关节所需转动的角度,这就叫做逆运动学分析[9]。由此可见,正运动学方程解的结果是唯一的,而逆运动学方程具有多解性,这就给假肢姿态问题的求解带来很大的困难[10]。首先要根据机器人假肢结构图建立D-H坐标系(图2)。

图1 机器人假肢结构图
机器人假肢的运动学坐标系如图2所示,以大地坐标系为基础坐标系,则机器人假肢的固定基坐标x、y、z构成的绝对坐标系,原点位置设在基座与杆件的交点上,即大臂与手臂的支撑杆件的交点处。而坐标x0、y0、z0构成的坐标系o0以及坐标x1、y1、z1构成的坐标系o1的原点也是在此交点处,这样建立固定基的便利之处是可以减少支撑处到大臂长度d0的影响;由坐标x2、y2、z2构成的坐标系o2与小臂连杆相连,坐标z1和坐标z2的距离是a2;由坐标x3、y3、z3构成的坐标系o3与坐标x2、y2、z2构成的坐标系o2在一个原点,可以减少小臂抬起的过程中位移的影响;由坐标x4、y4、z4构成的坐标系o4与手部相连,小臂长为d4;由坐标x5、y5、z5构成的坐标系o5的位置与手部工作中心点重合,其坐标系是由手部的运动方式来确定的,坐标系o4与坐标系o5之间的距离为a5。在建立坐标系时,一定要注意第一个和最后一个坐标系的原点的位置,它们将决定机器人的总变换方程。
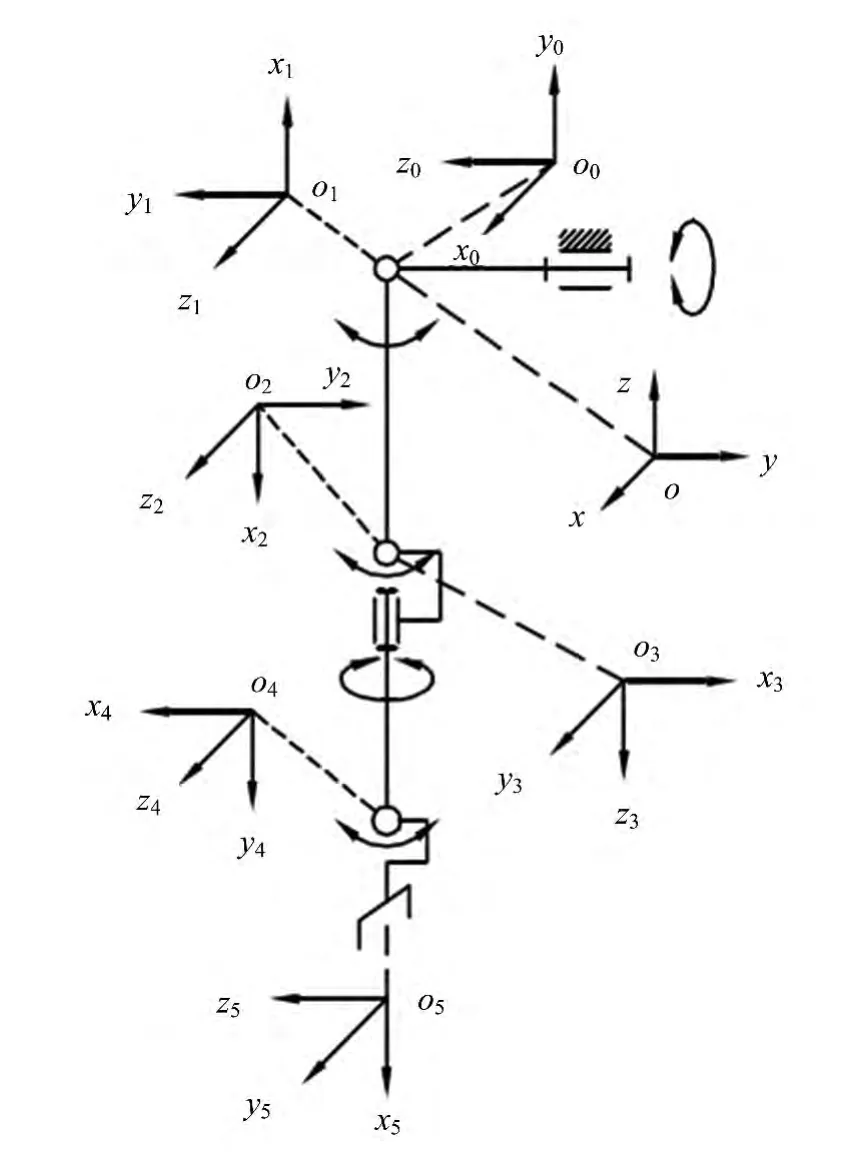
图2 机器人假肢的D-H坐标图
1.3 机器人假肢的运动学方程
结合图2“D-H法”建立的坐标系图,可以推导出机器人假肢的运动学方程,具体方法如下:首先根据坐标图确定各个关节的参考坐标系,然后确定各个关节连接杆件相对于所选择的基础坐标系的空间几何关系,即关节坐标系之间的变换,最后计算出机器人上假肢手部末端坐标系和基础坐标系之间的变换矩阵,得到整个机器人上假肢的运动学方程。其中,根据变换矩阵的需要,表明坐标间关系的四个参数为[8](P11):
ai:是从zi-1轴和zi轴间的最小距离;
αi:是由zi-1轴转向zi轴绕xi轴的偏转的关节角度(按右手规则);
θi:是由xi-1轴转向xi轴绕zi-1轴的偏转的关节角度(按右手规则);
di:是从第i-1坐标系的原点到zi-1轴和xi轴的交点沿zi-1轴的距离。
由前面的原则可得,通过D-H法建立6自由度机械手臂运动学坐标系参数,如表1所示。
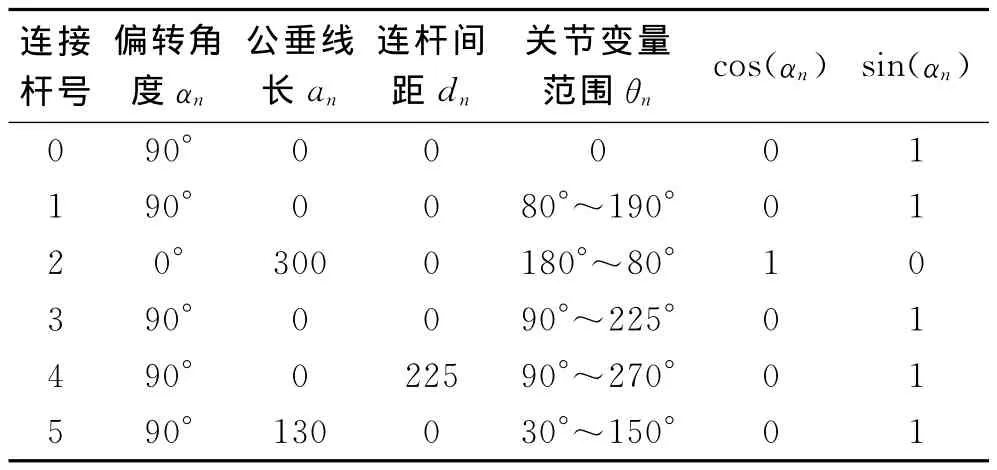
表1 机器人假肢连杆与关节参数
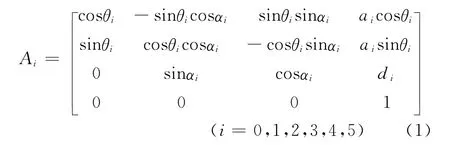
根据表1所示的参数得到A矩阵,并用A矩阵来表示T矩阵。机器人假肢的手部末端装置即为连杆6的坐标系,它与连杆i-1坐标系的关系可由i-1T6表示为[4](P53):

其中:
根据式(1)可以列出其各杆件的A矩阵并将表(1)数据代入该矩阵可得:
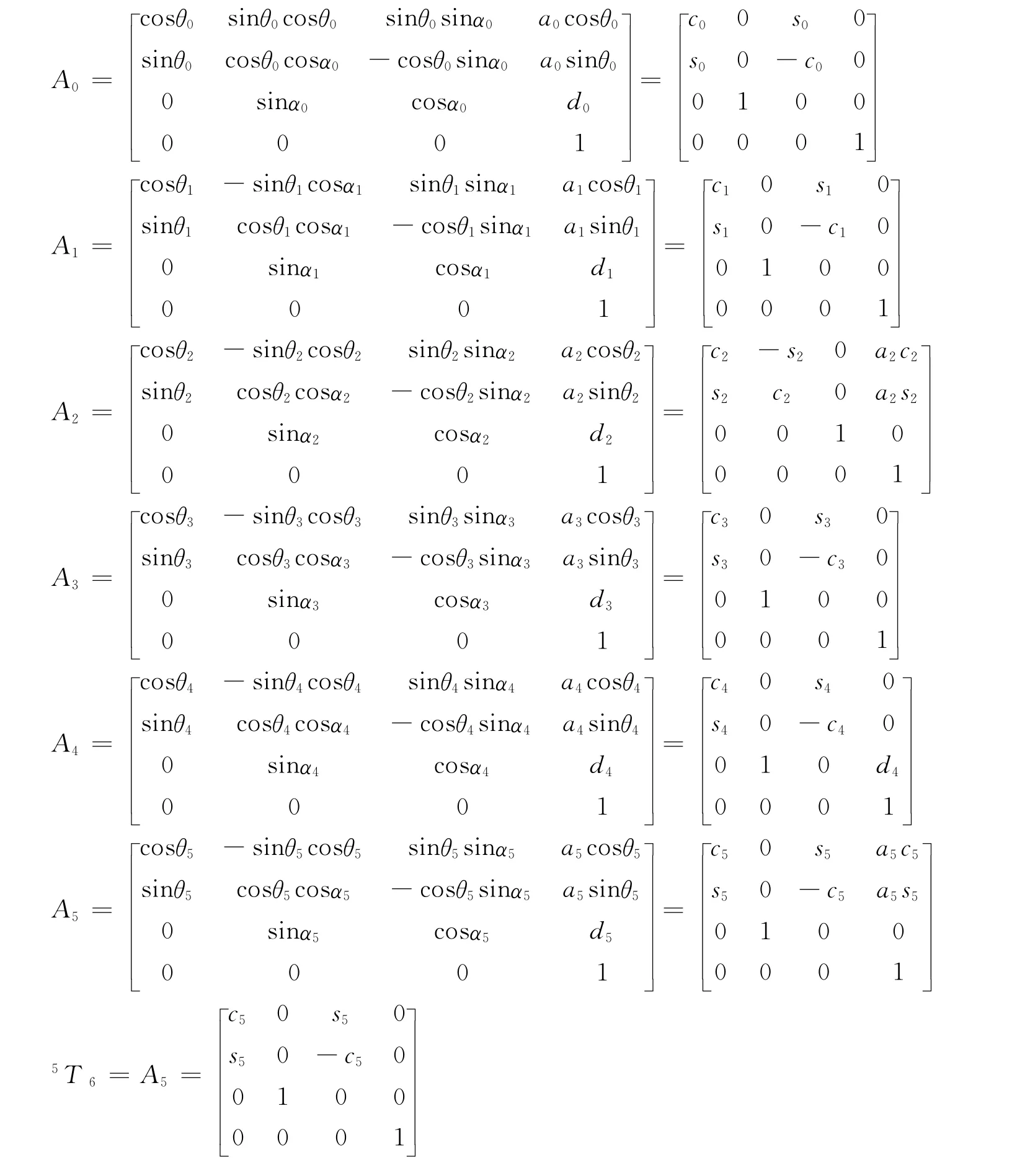
用公式iT6=AiAi+1…A5类推:
于是,可求得机器人假肢的T变换矩阵

2 机器人假肢工作空间的确定
机器人假肢的工作空间就是机器人假肢正常受控制执行动作时,手部末端构件坐标系的原点所能达到位置点的集合,是由整个上假肢自身的关节杆件长度和旋转角度等特性指标决定的。对于机器人假肢,其机械结构、连杆长度、各个关节的坐标系以及运动学方程都是已知的,则机器人假肢末端的手部能到达的点的集合就称为机器人假肢的工作空间,可以通过数学方程结合机器人的连杆和关节的约束条件,求出每个关节的运动范围。
2.1 机器人假肢的工作空间分析
机器人假肢有6个自由度,其工作空间的形成可以看做是各个自由度相对上个自由度旋转运动所形成的空间,具体过程:手部末端执行器的坐标系o5绕杆件4坐标系o4的z4轴旋转到的坐标位置,这些坐标点在坐标系o4中形成的空间W4(p);然后W4(p)随杆件4的坐标系o4一起绕杆件3坐标系o3的z3轴旋转,则在坐标系o3中形成了工作空间W3(p)。同样的,在坐标系o2、o1、o0分别旋转后可以形成假肢各个关节杆件对应的工作空间。由于各个关节的旋转角度和杆件参数的限制,在机器人假肢各个关节自由度运动时可能会出现手部末端杆件不能达到的坐标点,这些坐标位置点在工作空间之内形成的空间称为空腔,而穿透工作空间的坐标点形成的空间则称为空洞。
将机器人假肢运动学方程结合表1的杆件参数和关节可变化的范围,解出手部末端机构坐标系原点的全部解,表1中连接杆件的长度参数是确定的,则手部末端机构的工作空间则主要是由各个关节角度变化量θi(i=1,2,3,4)决定的,用齐次坐标表示为:

2.2 机器人假肢的工作空间仿真


图3 机器人假肢工作空间的蒙特卡洛分布图

将随机选取的关节变量值θi代入步骤(1)建立的机器人假肢运动学方程数学模型,即可得到假肢手部末端机构在工作空间的任意可到达的点。(4)利用MATLAB仿真软件的绘图工具将这些点绘制成图形显示出来,即机器人假肢手部末端机构工作空间的蒙特卡洛分布图。
可任意设置计算的循环次数并绘图,选取的计算次数越多,则计算所得到的末端随机点越多,但也增加了计算的数据量和仿真的时间,因此选择合适的计算次数即可。综合考虑选择把计算循环次数设为5 000,对应地可以得到假肢末端手部对应的5 000个随机点,分析结果如图3所示。
从程序仿真运行结果可以看到,机器人假肢末端手部机构的工作空间为一近似缺椭球的形状,基本实现人类手臂在大臂固定时手部能到达的空间范围点。且该空间范围内部空间紧凑,无空穴和空洞,蒙特卡洛法可以把机器人假肢的工作空间用图形直观显示出来,不仅可以直观地看到所设计的假肢的理想效果,精确了轨迹规划,而且有利于后续的控制系统的设计等工作。
3 结语
针对仿人形上肢机器人假肢的基本功能需求,提出了一种基于6自由度机器人上假肢运动学和工作空间分析方法。根据所设计的假肢结构图数学模型,建立D-H坐标系,并结合各个关节参数和角度变化进行运动学方程的建立和工作空间的求解。借助蒙特卡洛方法,通过MATLAB进行机器人假肢的工作空间的仿真分析。此方法不仅精确了机器人假肢轨迹规划,而且对机器人假肢的设计具有实用价值。
[1]肖源.我国残疾人辅助器具技术发展现状及其原因的剖析[J].科技创新导报,2011,3(28):246-246.
[2]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[3]田西勇.机器人轨迹规划方法研究[D].北京:北京邮电大学(硕士学位论文),2008.
[4]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[5]A.Green,J.Z.Sasiadek.Adaptive Control of a Flexible Robot Using Fuzzy Logic[J].Journal of Guidance and Dynamics,2005,28(1):36-42.
[6]孟庆鑫,王晓东.机器人技术基础[M].哈尔滨:哈尔滨工业大学出版社,2010.
[7](美)克来格(Craig,J.J.).机器人学导论[M].贠超,译.北京:机械工业出版社,2006.
[8](美)尼库(Niku,S.B.).机器人学导论——分析、系统及应用[M].孙富春,译.北京:电子工业出版社,2004.
[9]王海,蔡英凤,张为公.一种7DOF机械臂逆运动学解析算法及应用[J].江苏大学学报,2011(5):254-259.
[10]熊大柱.一种7自由度生机电假肢手臂的结构设计及运动学分析[D].武汉:华中科技大学(硕士学位论文),2013.
