多联泵应用于道岔同步转换研究
2015-01-01杨树仁张立军黄天新刘尚超
杨树仁 张立军 黄天新 刘尚超
铁路道岔的转换是通过转辙机牵引道岔的尖轨及心轨,完成定位与反位间的位置转换。随着铁路速度不断提高,高速大号码道岔不断应用,道岔转换也需要多个牵引点同步牵引完成。如客运专线60kg/m钢轨42号道岔需要9点同步牵引,其中尖轨6点牵引,心轨3点牵引,多机多点同步转换控制成为铁路道岔转换系统的关键。
1 道岔多机牵引同步转换
道岔多机牵引的同步性能是指尖轨按不同开程的要求,在规定的同一时间内完成所需的位移,并且使尖轨在位移的全过程中,各牵引点不应互相阻碍,不应出现蛇形运动,造成附加阻力,导致尖轨产生不应有的变形。
由于道岔开程不等,道岔转换必然以尖轨变形点为中心,呈扇形转动。多个牵引点上的力作用在一个尖轨上,要求各个牵引点无交替牵动,做到匀速位移,同时到位。根据现场的使用实际情况,很难做到各个牵引点动作完全没有时间差。
2 电液转辙机道岔同步转换现状
国内外常用于道岔多点牵引的主要为电动转辙机及电液转辙机。在道岔多点牵引转换中,电动转辙机之间是通过控制电路进行连接,通过电气控制实现道岔多点牵引转换;而电液转辙机之间是通过油管进行连接,通过油路控制实现道岔的多点牵引转换。电液转辙机多点同步转换依赖于液压油路系统,由于液压控制本身的特点,电液转辙机的多点同步转换一直是一个难点,至今未能很好的解决。
目前国内使用的电液转辙机多采用单个油泵控制多个油缸的方式,完成道岔的多点牵引转换。油缸安装于转换锁闭器中,每个油缸对应一个转换锁闭器,驱动道岔的一个牵引点。
图1所示为ZYJ7型电液转辙机2点牵引的油路系统。当电机带动油泵工作时,泵出的高压油注入油缸的腔体内,压动油缸完成左、右两侧终端位置间的转换,从而完成牵引道岔定位与反位间的转换。由于油缸采用并联方式,每个牵引点的油压相同,不能单独调整,2个油缸之间互相影响,当某个油缸所在牵引点处的道岔阻力较大时,油路中的高压油就会流向道岔阻力相对小的一个牵引点,先推动阻力较小的牵引点动作,当阻力达到平衡时,2个牵引点才会同时动作。因此,道岔在进行定位与反位间转换时,会出现扭曲或蛇形运动的现象,虽然可以增加调节阀来调节各个牵引点的速度,但这种调节是有限的,无法克服油路本身所存在的不足,做到理想的同步转换。
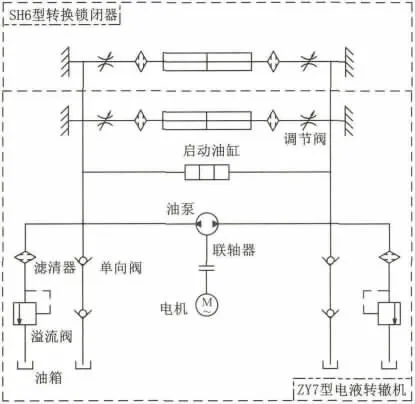
图1 ZYJ7型电液转辙机的油路系统
3 多联泵同步转换设计
为了解决目前电液转辙机转换同步性不好的问题,设计了一种采用多联泵进行多点同步转换的方案。将多个油泵连接在一起,只需一个电机就能同时带动多个油泵工作,每个油泵有独立的进油口、出油口及压力调节装置。
3.1 工作原理
图2所示为采用三联泵驱动3个油缸进行3点牵引的油路系统原理图。一、二、三级油泵分别连接第1、第2、第3牵引点油缸,由一个电机带动3个油泵同时工作,各个油泵泵出的高压油,通过各自管路进入到对应的油缸腔体内,压动对应的油缸完成左、右侧终端位置间的相互转换,从而完成牵引道岔定、反位间的转换。每个油泵单独控制一个油缸的压力和流量,各个油缸之间互相不影响,互不干扰,只要根据道岔各个牵引点处的阻力和开程,合理匹配对应的各个油泵和油缸的参数,即可做到完全同步,从而消除在道岔多点牵引转换过程中容易出现的扭曲或蛇形运动的现象。多联泵控制多个油缸完成道岔多点同步转换的原理同上所述。
3.2 多联泵与油缸配置方式
1.不同参数油泵驱动相同参数油缸。多联泵每级油泵的排量不同,各级油泵所对应的油缸参数相同。根据道岔各个牵引点处的阻力和开程,在油缸的活塞杆直径和缸体直径确定的条件下,计算出对应每个泵的排量,完成油泵与油缸的匹配。
2.相同参数油泵驱动不同参数油缸。多联泵每级油泵的排量相同,各级油泵所对应的油缸参数不同。根据道岔各个牵引点处的阻力和开程,在油泵确定的排量下,计算出道岔每个牵引点处所对应油缸的截面积及体积,进而计算出每个牵引点所对应油缸的活塞杆直径和缸体直径的大小,完成油泵与油缸的匹配。
综合以上2种配置方式,优选第一种方式,油泵的排量相对好调整,由于活塞杆、缸径以及密封圈等规格的限制,油缸的参数不好调整。
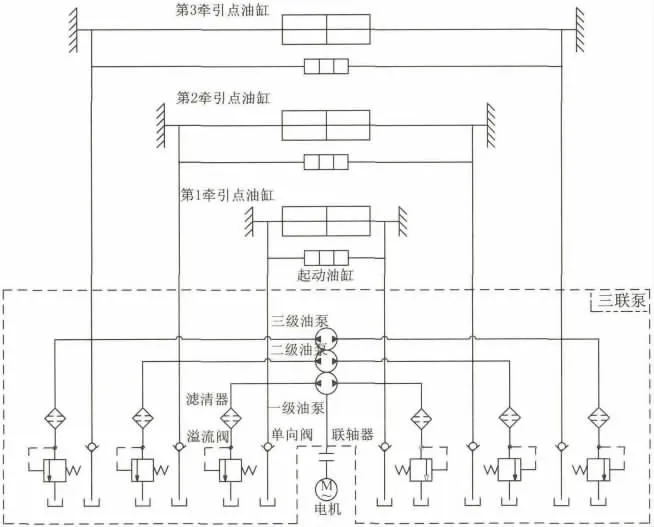
图2 三联泵控制三点牵引的油路系统
4 试验验证
为了验证方案的可行性,进行了多台样机试制及大量试验。试验采用三联径向柱塞泵,并且选用了不同参数油泵驱动相同参数油缸的配置方式。
图3所示为采用三联泵动力单元驱动3个带有油缸的转换锁闭器,模拟道岔3点牵引的同步转换试验过程。
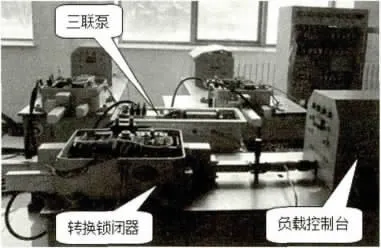
图3 模拟道岔3点牵引的同步转换试验过程
根据现场使用的三点牵引道岔转换所需的力值调整负载。转换锁闭器的油缸动程为经过解锁、锁闭及转换动作,走完每个牵引点道岔实际开程所需的位移。记录正、反转试验每个油缸到达终端位置的时间,即模拟道岔从定位到反位,以及反位到定位的动作时间。具体试验数据如表1所示。

表1 采用三联泵进行三点同步试验测试表
由表1数据可知,电机带动油泵正转完成转换时,3个牵引点油缸到位的最大时间差:
△t正=tmax-tmin=14.8-13.9=0.9s
电机带动油泵反转完成转换时,3个牵引点油缸到位的最大时间差:
△t反=tmax-tmin=14.5-13.7=0.8s
由此可知,电机带动油泵正转及反转过程,3个牵引点油缸到位的最大时间差均小于1s。
对于道岔同步控制,道岔各牵引点到位时间差应控制在0.1倍动程差之内。上述试验所模拟的3点牵引道岔,第1牵引点与第2牵引点动程差为50mm,第2牵引点与第3牵引点之间的动程差为20mm,选取最小的20mm为基本动程差,按照0.1倍的动程差计算得到该组道岔3个牵引点之间的转换时间差,应控制在2s(0.1×20=2s)以内,而采用三联泵进行三点牵引的转换时间差最大值不到1s,满足道岔多点牵引同步原则。在这种很小的时间差内,道岔各个牵引点基本上是同步到位,不会出现道岔的扭曲及蛇形运动的现象,不会对道岔尖轨及心轨造成附加阻力从而引发故障。
实际生产过程中,控制好油泵及油缸的精度,减小零件尺寸偏差,减小内部泄漏,使得油泵的排量和油缸的体积等参数的理论计算与实际数值接近一致,还能进一步减小转换时间差,提高同步性能。
5 结束语
采用多联泵进行道岔的多点同步牵引,只需一台电机带动多个油泵工作,单个油泵控制单个油缸,各个牵引点油路单独工作,互不影响,可以消除电液转辙机传统同步转换方式容易出现的道岔扭曲及蛇形运动,有效地解决电液转辙机的道岔同步转换问题。此外采用多联泵进行道岔的多点同步牵引,不仅结构简单、稳定可靠,而且可以节省成本,便于生产制造。
[1] 丁安秋.道岔双机牵引同步性能的探讨[J].铁道通信信号,1996,29(7):10-11.
[2] 纪晏宁,万良元.电动液压道岔转换系统[M].北京:中国铁道出版社,2004.
[3] 黄天新,孙晓勇,张玉林,等.一种应用于液压转辙机内的多联泵[P].中国:ZL 2013 2 0799655.0,2014.
[4] 王平.高速道岔设计理论与实践[M].成都:西南交大出版社,2011.
[5] 安高成,刘小红,王明智.转辙机专用径向柱塞泵的研制[J].机床与液压,2006,8:117-121.
