阵列感应测井仪与CAN 总线测井成像系统的挂接
2014-12-24严正国王海强
严正国 王海强
(1. 西安石油大学 陕西 西安)(2. 西京学院 陕西 西安)
0 引 言
CAN 总线是一种具有国际标准的现场总线,由于其可靠的通信能力、良好的错误检测能力以及独特的设计,成为国际上应用最广泛的总线之一。测井仪器系统是一种分布式实时测控系统,CAN 总线的特点能够有效地支持分布式测控系统。随着CAN 总线技术的普及和石油仪器组合化的发展,CAN 总线已经成为井下快速组合测井平台常用的总线。因此为了实现组合化测井,各种型号的仪器就需要标准的CAN 接口来实现与CAN 总线测井仪器系统的挂接。本文主要介绍了阵列感应测井仪与CAN 总线测井成像系统的挂接实现。
在测井成像系统中,CAN 总线通信方式主要应用于高速电缆遥传与井下仪器之间,可以采用多主通信方式,也可以采用单主多从的通信方式。本文介绍的CAN 总线通信采用单主多从轮询的通信方式,每隔80 ms向井下仪器发送远程帧请求数据,80 ms 分成若干时间段分配到井下各支仪器。在不同的时间段,仪器收到相应地址的远程帧的向总线传送数据,然后就等待下一个远程帧的到来。遥传在向单支仪器请求数据的时间段,不需要应答信号,等待若干时间就向下一支仪器的请求数据。
阵列感应测井仪可以提供从浅到深的电阻率测井曲线读值,其垂直分辨率很高,一致性好,已成为电缆感应测井的标准。由于仪器能够提供丰富的地层信息,因此需要处理的数据量也比较大,数据采集模块采集、处理、传输仪器数据需要的时间也较长。因此遥传请求数据和仪器更新数据之间存在时序上的差异,需要在接口板的软件设计中协调两者的工作时序。
1 接口的设计
1.1 接口的硬件设计
CAN 总线的接口主要是实现阵列感应仪与CAN总线测井成像系统的稳定可靠通信,是系统与仪器连接的桥梁。接口不仅需要协调仪器的数据采集模块与遥传、地面系统的通信连接,同时不能干扰系统中其它仪器的正常工作。接口与系统连接结构示意如图1所示。

图1 接口与系统连接结构
一个CAN 总线接口由3 个部分组成,它们分别对应于CAN 总线的物理层、数据链路层和应用层。最上层为微控制器,主要负责上层应用及系统控制,包括CAN 协议的应用协议的实现,协调各系统设备的工作。中间层为CAN 控制器,负责处理数据帧,完成数据的打包、解包、错误界定,并提供报文缓冲和传输滤波。最底层为CAN 收发器,主要是进行接口电平的转换、接口电气特性的处理。独立的CAN 控制器需要外接一个微处理器,在CPU 的控制下才能运行。
本文介绍的CAN 总线接口采用的C8051F060 集成了微处理器和CAN 控制器,大大简化了应用系统的硬件设计,系统的可靠性也有很大的提高。CAN 收发器采用TI 公司生产的SN65HVD230 型电路,适用于较高通讯速率、良好抗干扰能力和高可靠性CAN 总线的串行通信。CAN 总线的两端需要接一个匹配电阻,提高通信的抗干扰能力和可靠性。为了降低仪器节点对总线的干扰,采用电源隔离和数据隔离。接口电路结构示意如图2 所示。
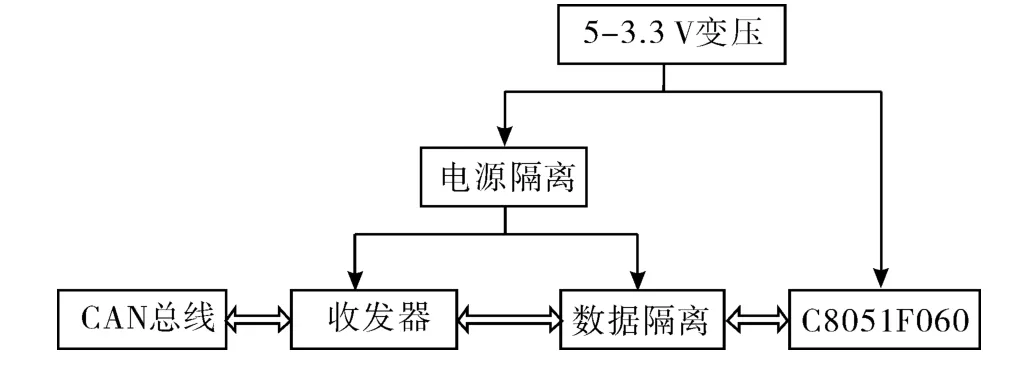
图2 接口电路结构图
1.2 接口的软件设计
接口板的软件设计主要是协调单片机集成的CAN控制器与异步串行口UART 之间的通信,实现仪器与总线之间的数据传输。
单片机通过串口与仪器的数据采集模块通信,数据采集模块每隔一定时间更新一次数据,更新后的数据存放在缓冲区,等待接口板请求数据。同时,通过CAN 接口与总线通信接收总线上的信息,包括地面系统发送的命令帧和遥传发送的远程帧。地面系统随机向下发送命令帧,不请求数据,只改变仪器工作状态。遥传每80 ms 发送一次远程帧,只请求数据。因为数据采集模块更新数据和远程帧请求数据的时间不匹配,为了保证两者的数据正确传输,需要在软件设计上同步两者的时序。本文采取的措施是在接口板上设置存储缓冲区,缓冲区用来接收来自数据采集模块更新的数据。遥传的远程帧到来时,把缓冲区存放的数据发送到总线,接口板不立即向数据采集模块请求数据,设置缓冲时间,等待若干个远程帧后再向数据采集模块请求数据,从而更新总线上的数据。程序的主要流程如图3 所示。
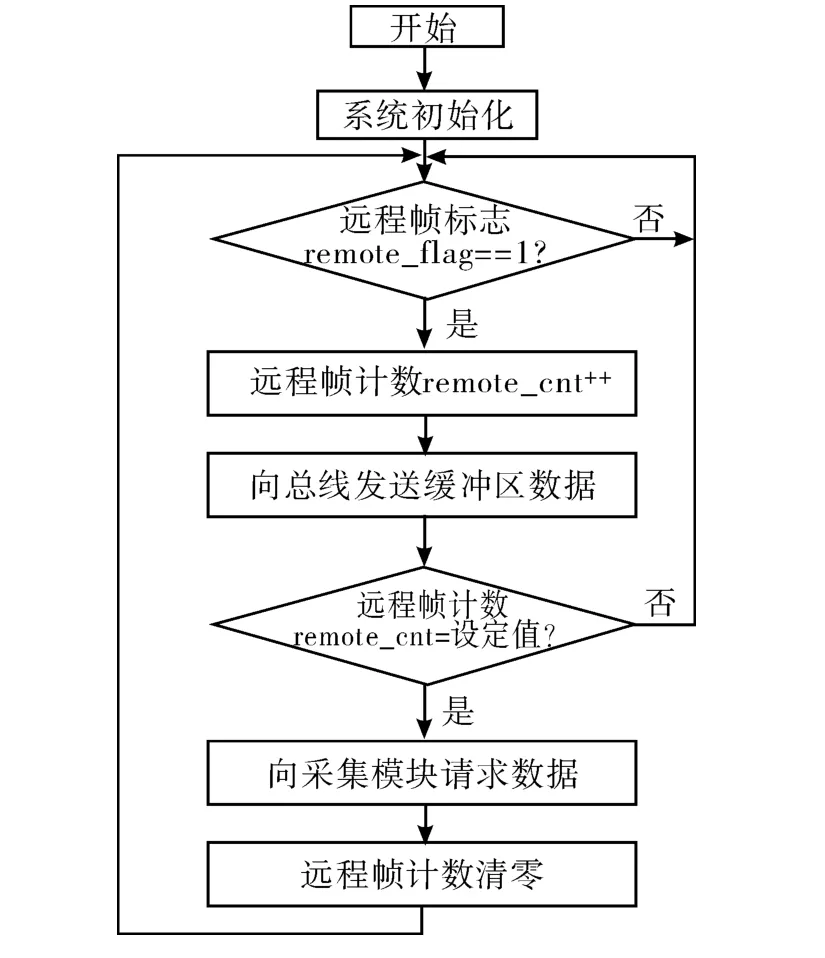
图3 程序流程图
流程图中的标志位remote_flag 的置位在CAN 的接收中断中实现,当总线上远程帧到达该仪器节点,程序就会进入接收中断,置位远程帧标志位。否则,程序就会进入等待状态。
2 挂接的实现
2.1 仪器与地面系统的配接
仪器在挂接到CAN 总线系统调试过程中,需要保证仪器与地面系统的正常通信,这样能够排除总线上的干扰,容易配接。同时很容易定位问题,找到接口板设计存在的缺陷。仪器与地面系统的配接包括四个模块的通信,包括地面系统、遥传、接口板和数据采集模块。
在仪器与地面系统配接过程中,首先地面系统不发命令,接口板不向数据采集模块请求数据。遥传向接口板请求数据,此时缓冲区中存放初始化的数据,这样能够确定接口板的CAN 接口与遥传的正常通信。根据C_CAN 用户手册,当仪器节点收到远程帧,接口板的CAN 控制器中的相应的消息对象有三种设置来处理远程帧。一般最常用的设置是,接收到远程帧后,CAN 控制器自动发送具有同一标识符的数据帧。第二种配置是忽略远程帧,节点不做响应。此处采用第三种配置,把远程帧类似于数据帧来处理,接到远程帧后,节点不自动发送数据,只改变远程帧标志位,通过判断标志位节点主动发送数据,远程帧的标识符和节点发送的数据帧的标识符不相同。
地面系统与仪器的通信过程中,数据采集模块启动采集可能需要较长的时间,这时候地面系统在仪器上电的过程中发送命令帧,容易导致数据采集模块的不正常工作。因此,一方面要保证数据采集模块的主控芯片的可靠复位,另一方面,接口板需要延迟命令下发的时间。通过对CAN 总线发送数据的次数计数,延迟第一次命令下发的时间,从而确定地面系统下发命令,通过遥传和接口板的透传,数据采集模块的正常工作。
接口板与数据采集模块的串口通信影响着数据的更新速度和正确传输。数据采集模块采集到数据之后就把数据放在缓冲区等待接口板的命令,当采集没有完成,接口板就请求不到数据,如果接口板的串口接收过程处理不当,把这个过程放在主程序,接收中断服务程序只改变标志位,就会导致程序死机。为了保证接口板数据的连续转发,需要把接口板的串口接收过程放在串口的接收中断服务程序中,从而保证程序的连续执行,事实也证明这种处理也解决了拷机过程中丢帧乱帧的现象。
2.2 仪器与总线系统的集成
仪器在与地面系统成功配接后就可以进行仪器与CAN 总线测井成像系统的集成。CAN 总线上挂接着来自不同厂家的不同型号的仪器,都是通过CAN 总线接口挂接在总线上,按照CAN 总线通讯协议实现协调工作。每个挂接到总线上的仪器都需要遵守CAN 总线通讯协议,与其它仪器的共同工作。
由于总线上各种仪器硬件上的差异和仪器集成后延长了通信距离,总线上不可避免出现各种干扰。干扰表现在各种方面,通常表现为接入新仪器后总线上时序混乱,仪器都不能正常工作或部分不能正常工作。本文从硬件和软件两个方面去解决总线中的相互干扰。
首先,在硬件电路上需要调节终端电阻,终端电阻主要是解决信号在通信线路中由于阻抗的不连续和不匹配造成的信号反射。信号的反射降低了通信的抗干扰性和传输能源效率,在通讯线路处在空闲方式时,可能造成整个网络数据的混乱。阵列感应接在测井成像系统的最末端,对输出功率要求比较严格,因此调节终端电阻显得更加重要。终端电阻的理论值是120 Ω,但是在具体使用中应结合现场具体情况调节合适的阻值。
其次,程序设计中在设置消息对象之前,宜将相应的消息对象Msgval 设置为无效,配置完成后再将Msgval 设置为有效。同时,其它不用的消息对象也要设置为无效,防止在使用过程中,没有使用的消息对象的不可预测的行为造成的总线干扰。
最后,一般需要设置掩码滤波寄存器,通过掩码滤波屏蔽该节点不需要的地址标识符,从而使总线不能够响应其它节点的远程帧。但是在配接过程中,C8051F060 集成的CAN 控制器经常出现对其它节点的地址标识符的错误应答,掩码滤波无法屏蔽这种接收应答,影响到了其它仪器的正常工作。根据C_CAN 用户手册,本文通过使用测试模式下的静听(Slient)模式解决了当前节点的错误应答,成功实现了阵列感应仪在测井成像系统上的挂接。
CAN 控制器可以在正常模式和测试模式下工作。正常模式用于正常通信,测试模式往往是为了检验总线上的错误,通过设定特定的工作模式来定位问题所在。在静听模式下,CAN 控制器能够接收到有效地远程帧和数据帧,但是它只能够向总线上发送隐性位,不能启动数据传送。尽管CAN 总线一直处在隐形状态,如果CAN 控制器需要一个显性位(应答位,过载标志,激活错误标志),该位在内部自动更改以至于CAN 控制器内核可以监听到这个显性位。静听模式可以通过屏蔽该节点发送的应答和错误帧用来分析总线上的运行状况。静听模式下的CAN_TX 和CAN_RX 与CAN核的连接如图4 所示。
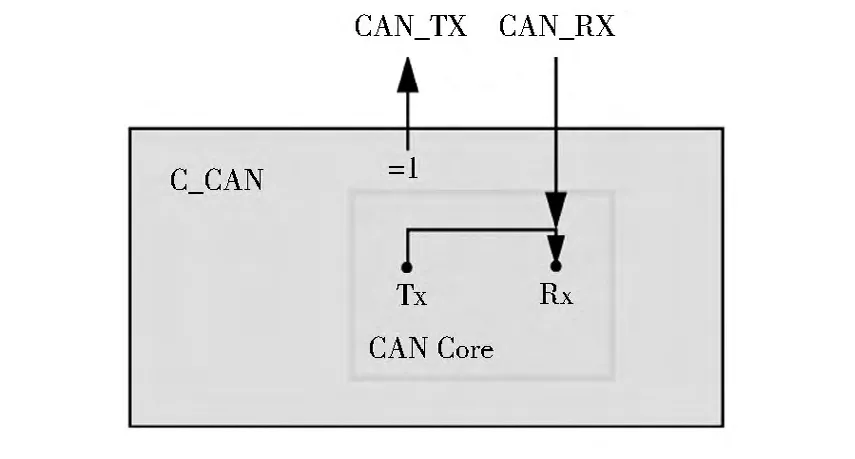
图4 静听模式
在静听模式下,CAN 控制器Tx 状态不影响总线,对CAN_TX 输出始终为1。但是,Rx 不仅能接收总线上CAN_RX 上的信号,还能接收到自身Tx 上的信号,其Tx 与CAN_RX 对控制器Rx 的作用为与运算,即若Tx 发送显性电平0,CAN_RX 发送隐形电平1,则控制器收到的电平为0,不过Tx 的状态不会反馈到总线上。通过设置CAN 控制器工作在静听模式,消除了新接入的仪器对总线的干扰,保证了当前节点不会对总线产生影响。当仪器节点收到该节点的远程帧后,主程序就需要把CAN 控制器切换到正常工作模式,发送数据,发送结束之后立即返回静听模式。这样在主程序中发送数据过程的前后设置模式转换实现了当前节点的正常通信。在实际使用中,这种工作方式稳定可靠,满足了使用要求。
3 结 论
CAN 总线组合测井是当前测井行业的发展趋势,传统仪器与总线系统的挂接成为仪器厂家必须面对的问题。挂接过程涉及的仪器种类繁多且来自不同的厂家和地区,给挂接带来许多困难和麻烦。本文介绍了阵列感应测井仪与CAN 总线测井成像系统的挂接过程中出现的各种问题,并给出了比较可靠的解决方案,为其它仪器的挂接提供了参考,具有一定的实用价值。
[1]杨 明,郭海龙. CAN 总线在测井仪器中的应用[J]. 石油仪器,2009,23(4)
[2]童长飞. C8051F 系列单片机开发与C 语言编程[M]. 北京:北京航空航天出版社
