基于滑移率的路面附着系数估计
2014-12-23李宣政
李宣政
(重庆邮电大学 汽车电子与嵌入式系统工程研究中心,中国 重庆400065)
0 引言
以自适应巡航、主动避撞、ABS控制系统为代表的汽车纵向安全辅助系统对于改善整体交通环境、降低交通事故发生率、提高驾乘舒适性具有重要意义,其安全策略模型直接关系到系统的功能性、可靠性及用户认可度[1]。当路面附着系数未知时,主动安全系统的性能通常无法充分发挥[2-3]。如果能够实时估算出路面峰值附着系数,系统就可以根据当前路况调节控制策略,提高车辆安全[4]。
国内外都已经在路面附着系数识别领域做了很多研究。仪器测量法利用光学传感器、电磁波传感器等,通过检测路面附着物质(如水,冰,雪等)估计路面附着系数。该方法的优点是,在轮胎接触路面之前可以预先估计路面的附着系数。缺点是,不能反映影响路面附着系数的其他因素,如轮胎气压、轮胎磨损等[5-6]。该类方法对经过试验训练的路面具有较好的估计精度,对未经过训练的路面则难以得到满意的效果[7],试验存在可重复性差、成本较高及影响因素多等问题。基于车辆动力学的方法是根据车辆侧向动力学特性,利用车载GPS估计轮胎的侧偏角,然后根据车辆侧向动力学模型估计路面附着系数[8]。此方法在车辆侧偏角较小的情况下,难以正确估计路面附着系数。
目前,能够直接测量路面附着系数或是轮胎力的传感器造价高昂且可靠性较低,因而大多采用估计的方式获得。
车辆行驶在不同附着系数的路面上,滑移率和利用附着系数表现出不同的关系。利用这种特性进行路面附着系数识别是目前各类方法中最具实用前景的。
车轮滑移率s和利用附着系数ρ的定义[9]分别为:

式中,ω为轮速,r为车轮半径,v为车速,Fx为地面对车轮的纵向作用力,Fy为地面对车轮的横向作用力,Fz为车辆垂向载荷。如果忽略轮胎横向力Fy,则有:

不同附着系数路面上的s-ρ关系不同,如图1所示。图中μ为对应的路面附着系数,即最大利用附着系数。
由于爬坡阻力对车辆的运动状况有很大影响,本文将对已有的基于路面附着系数和滑移率关系曲线的路面辨识方法进行改进,针对非水平路况,利用路面附着系数和滑移率的关系,通过递推最小二乘算法实现了路面附着系数的实时估计。
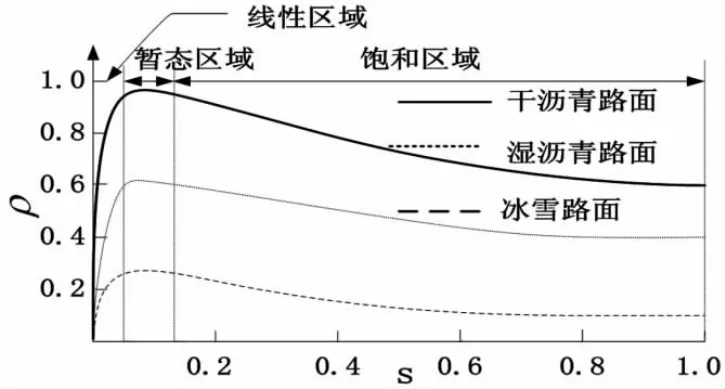
图1 滑移率与路面附着系数关系曲线Fig.1 Slip ratio and road adhesion coefficient curve
1 车辆模型
1.1 车辆纵向动力学模型
车辆在车轮牵引力作用下做直线运动时,车辆纵向动力学模型如下图2所示:

图2 车辆纵向动力学模型Fig.2 Vehicle longitudinal dynamics model
其数学方程如下:

式中:m为汽车总质量;ax为车辆纵向加速度;Fx为车辆牵引力,是前轮牵引力(左前轮、右前轮)Fxf和后轮牵引力Fxr(左后轮、右后轮)之和,表达式如下:

Rx为车辆滚动阻力,是前轮滚动阻力Rxf和后轮滚动阻力Rxr之和,表达式如下:

滚动阻力与轮胎法向力成正比,表达式如下:

其中,i=fl,fr,rl,rr,f为滚动阻力系数,β为路面坡度,DA为空气阻力,与车速的二次方成正比,表达式如下:

其中:Cd为空气阻力系数,A为迎风面积,ρ为空气密度,Vx为车辆纵向速度。
1.2 车辆负载转移模型
轮胎法向载荷可以通过负载转移模型获得,可假设左前轮与右前轮,左后轮与右后轮的法向载荷分别相等。车轮的法向载荷如下:

其中:Fz,fl,Fz,fr,Fz,rl,Fz,rr分别为左前轮,右前轮,左后轮,右后轮的法向载荷;Lf,Lr分别为车辆质心到前轴,后轴的纵向距离;ax为纵向加速度,h为车辆质心高度。
2 基于递推最小二乘法的路面附着系数估计
根据滑移率与路面附着系数关系曲线可知,可以按滑移率的大小将车辆行驶状态分为3个阶段,分别为线性区域 (滑移率满足0≤s<0.05),暂态区域(滑移率满足0.05≤s<0.3),饱和区域(滑移率满足0.3≤s<1)。车辆正常行驶过程中,轮速与车速基本相等,滑移率很小,通常小于0.05,而车辆在加速或者制动过程中,轮胎滑移率和纵向力关系曲线很快地由线性区域过渡到饱和区域,停留在暂态区域的时间非常短,可以忽略,因此,可仅考虑线性区域和饱和区域的路面附着系数估计问题。
2.1 线性区域的路面附着系数估计
在线性区域内,利用附着系数与滑移率成正比例关系。在小滑移率区域的范围内,利用附着系数可以表示为:

利用附着系数K(μ)为滑移率与路面附着系数关系曲线的斜率。在高附着路面上,K(μ)值越大,在低附着路面上,K(μ)值越小。若识别出刚度系数K(μ),就能得到路面附着系数的估计值。
考虑四轮驱动车辆,将(5)、(6)、(11)代入(4),整理得:

整理为递推最小二乘的基本形式:

其中,系统输出观测信息:
y(t)=max+mgsinβ+Rxf+Rxr+DA;系统输入观测信息:;待辨识未知参数:θ(t)=K(μ);e(t)为系统估计误差。 通过辨识斜率 K(μ),进而估计路面附着系数。
2.2 饱和区域的路面附着系数估计
当滑移率过大,车轮会发生空转或抱死的情况,线性区域的路面附着系数估计方法已不适用,此时轮胎力已达饱和,由动力学方程牵引力可以表示为:

将(14)代入(4)式整理得:

整理为递推最小二乘法的基本形式:

其中,系统输出观测信息:

系统输入观测信息:φ(t)=1;待辨识未知参数:θ(t)=μ。通过辨识μ得到路面附着系数的估计。
2.3 递推最小二乘法的计算步骤
为了跟踪时变参数,提高估算精度,有必要采用递推最小二乘法。递推最小二乘法进行辨识时每获得一次新的观测数据,就在前一次估计结果的基础上,利用新引入的观测数据,根据递推算法对前一次的估计结果进行修正,从而获得新的参数估计值。与批处理最小二乘法比,具有计算量少,节省计算机存储量等优点。带遗忘因子的递推最小二乘法具有加强新数据提供的信息量、降低旧数据对系统模型无关性的影响、防止数据饱和等特点。
带遗忘因子的递推最小二乘法的计算步骤如下:
步骤 1:初始化参数 θ(0),P(0),及遗忘因子 λ。
一般取θ(0)=0或极小的数,这里取θ(0)=0,P(0)=106(值越大收敛速度越快),遗忘因子λ取值范围为0.9<λ<1,这里取0.98;
步骤2:测量系统输出y(t),计算回归矩阵φ(t);
步骤 3:计算估计误差:e(t)=y(t)-φT(t)θ(t-1);
步骤4:计算增益矩阵K(t):

步骤6:更新估计参数向量:

步骤7:每个时间拍重复步骤2—6。
2.4 Simulink仿真结果与分析
为了验证路面附着系数估计算法的有效性,在Matlab/Simulink仿真环境下进行了验证,车辆参数如表1所示:

表1 整车参数设定

图3 路面附着系数为0.2时的估计值
图4 路面附着系数为0.8时的估计值
分别在路面附着系数为0.2和0.9的路面上进行了仿真验证。初始车速设为36km/h,路面附着系数估计结果如图3、图4所示。从图3、图4可以得出,递推最小二乘估计算法能够较为准确实时地估计出路面附着系数,在路面附着系数为0.2时,估计值比0.2稍大,在路面附着系数为0.8时,估计值在0.8上下波动。由于模型误差、噪声干扰等原因,仿真结果的初始阶段出现了一些较大的波动现象,其后估计值比较稳定,不影响正常估计。
3 总结
本文利用滑移率和路面利用附着系数之间的关系,建立车辆纵向动力学模型,通过递推最小二乘算法对路面附着系数进行估计,并在matlab/Simulink环境下进行仿真验证。从仿真结果上看,递推最小二乘算法能正确实时地估计出了路面附着系数,验证了算法的有效性。
[1]吴利军,王跃建.面向汽车纵向安全辅助系统的路面附着系数估计方法[J].汽车工程,2009,31(3).
[2]丁惜瀛,张钦爽,覃艳丽.基于转矩分配的电动汽车横摆稳定性控制[J].大功率变流技术,2011(5):41-44.
[3]赵林辉,刘志远,陈虹.一种车辆状态的非线性估计方法研究[J].系统仿真学报,2009,21(6):1710-1715.
[4]余卓平,左建令.基于四轮轮边驱动电动车的路面附着系数估算方法[J].汽车工程,2007,29(2):141-145.
[5]Gridsada P.State,parameter,and unknown input estimation problems in active automotive safety applications[D].Minnesota: Univ.of Minnesota,2011.
[6]Phanomchoeng G,Rajamani R.Real-time automotive slip angle estimation with nonlinear observer[C]//Proceedings of the American Control Conference.San Francisco,2011.
[7]MtiUer Steffen,Uchanski Michael,Hedrick Karl.Estimation of the Maximum Tire.Road Friction Coefficient[J].Journal of Dynamic Systems,Measurement,and Control,2003,125:607-617.
[8]Hahn J,Rajesh Rajamani,Lee Alexander.GPS-based real-time identification of tire-road friction coefficient[J].IEEE Transaction on Control Systems Technology,2002,10(3):331-343.
[9]RajeshRajamani,GridsadaPhanomchoeng[J].IEEE/ASME TRANSACTIONS ON MECHATRONIOS,VOL.17,NO.6,DECEMBER 2012.
