面粉厂吸尘机器人方轮式全方位行走机构及定位纠偏设计
2014-12-20李光玲周宏雷张周新
李光玲 周宏雷 张周新
(1.江苏省信息融合软件工程技术研发中心,江苏 江阴 214405;2.江阴职业技术学院,江苏 江阴 214405)
面粉厂厂房内小麦的输送、破碎、磨研、筛分和包装等生产环节都是产生粉尘的源头,一方面工人长期工作在粉尘中会造成呼吸道方面的疾病;另一方面粉尘会给面粉厂安全埋下隐患。随着科技的进步,吸尘机器人将会越来越多地替代人工用于粉尘清扫。在此过程中,要求吸尘机器人既要实现粉尘的全面清扫,又要降低成本,提高效率,节约能耗,而实现这些要求的关键在于机器人的行走机构。由此,设计经济、高效、节能的吸尘机器人全方位行走机构越来越迫切。
国内外虽然对行走机构进行了长期的研究,但是全方位[1]的行走机构还仅局限于几种固有的形式:Swedish轮[2,3]、连续切换轮[4,5]、正交轮、偏心方向轮、球轮[6],上述几种机构的共性是结构和驱动复杂,电机成本高,电机无用功输出较多,在不平坦的场合使用时,自控能力差,目前大都处于摸索阶段,尚未能广泛地在生产中应用。
本研究拟通过创新设计轮子布局方式及方形轮子的配套组合等关键部件,进一步提高吸尘机器人行走机构的工作效率,降低成本;通过光电移动检测传感器解决吸尘机器人行进过程中因厂区不平造成的路线偏离问题;通过海绵接触型传感器避免吸尘机器人行进过程中与厂区内随意摆放的障碍物的碰撞问题,减小不必要的经济损失。
1 传统轮式机器人的不足
传统的轮式机器人普遍采用左右轮驱动加上万向轮辅助支撑的二自由度移动方式[7,8],它在向左或右运动时需有一个转弯的过程,目前的轮式机器人一次转弯相当于它平均行走0.785(π/4)个轮间距。这种行走方式最大的缺点是耗时又耗能,且最困难的是难以在转弯后与原方向保持垂直。
如图1所示,假设机器人在行进过程中遇到一垛斜向设置的墙,传统的二自由度移动机构所走的总长度为:

式中:
L——行走的总长度,cm;
L1——斜向墙在X方向的投影长度,cm;
L2——斜向墙在Y方向的投影长度,cm;
D——两行走轮的轮间距,cm;
S——行走机构的步进距离或坐标单位长度,cm。

图1 某一垛斜向墙示意图Figure 1 Schematic of a certain diagonal wall

假设机器人的移动速度为25cm/s,启动到停止用时0.4s,每次转过90°用时3s(转弯速度不能太快,否则惯性对转过的角度有较大的影响),则机器人在这个过程中所用的总时间约为105s,实际的有效行程仅为80cm,有效时间为3.2s。对于理想的全方位移动机构就应减少其中的转弯过程,如果考虑机器人启停时间,则所用的时间为15.2s。
由此可见,如果大功率机器人采用传统移动方式会浪费大量的电能,而且效率低。
2 方轮式全方位行走机构
2.1 行走轮
行走机构采用两组轴线互相垂直的轮系,在排列方式上轮子共4列,呈长方形排列,同方向转动的为一组;在轮子形状上将传统意义上圆形改成方形轮子,目的是利用它的长径抬高车位使其在垂直方向的轮子被抬离地面而不成为阻碍。
行走轮的工作原理如图2所示:当行走机构不动时,所有轮子由于惯性作用停留在一个平面上(即方轮的一条边与地面接触),也就是行走机构的最低位置;当一组轮子开始转动时,整个机构被渐渐抬离地面,另一组轮子也跟着被抬离地面,当转动的轮子转过其最高位置后,靠整个机构的重力惯性又回到它的最低位置(方轮的另一条边)。如此重复,两个电动机交差运行,加上正转反转,机构可随时向前后左右作直线运动。
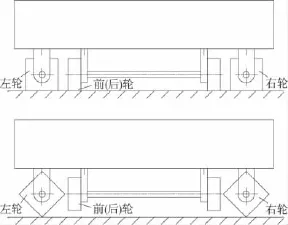
图2 行走轮工作原理Figure 2 Working principle of walking wheel
2.2 纠偏轮
为实现转向,行走机构增加纠偏轮,它是套装在行走轮一侧的轮轴上的单独驱动(差动)的比行走轮略小的非圆形或圆形偏心轮上。如图3所示,行走机构的轮子转动时,纠偏轮不转;行走结构不动时,纠偏轮可(正向或反向)转动纠偏。如此行走机构完全可以在前后、左右、转向3个动作上任意转换,并且转换过程不需要多余时间和动作。
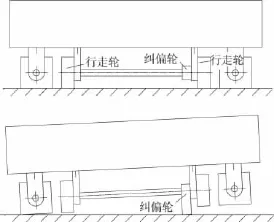
图3 纠偏轮工作原理Figure 3 Working principle of correcting wheel
2.3 辅助行走轮
在设计过程中进一步发现,多边形轮子在边长相等的情况下,边数越多,跨越的高度越小;同形轮子为了提高跨越高度,只能增大轮子的尺寸,但相应的步距也同比增加。在对步距精度要求高的场合,需对行走机构做进一步改进:在每组轮子(行走轮)的轮轴上再增加一组非圆形轮,其长径略大于多边形轮子的短径,且有独立的驱动机构,在此称它为辅助行走轮。其具体工作原理(图4)为:当行走轮转动时,辅助行走轮不转,行走机构大步距移动;当机器人需要小步距调整时,行走轮不转,辅助行走轮转动,将行走机构略微抬升移动。
辅助行走轮类似于纠偏轮,但与纠偏轮的区别在于纠偏轮是空套在行走轮轮轴上的单侧轮(也可以是各自独立的双侧轮),而辅助行走轮则是对称分布在行走轮轮轴上的同轴双侧轮;纠偏轮是可以只存在在前后轮或左右轮中的一组上(也可以两组上都有),而辅助行走轮则是在前后驱动轮轮轴和左右驱动轮轮轴上都有。
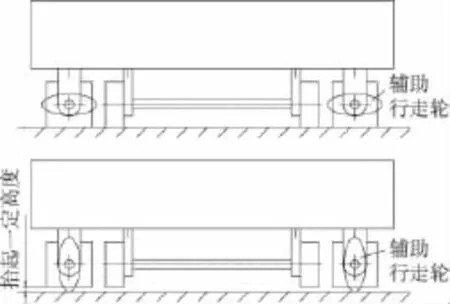
图4 辅助行走轮工作原理Figure 4 Working principle of auxiliary wheel
3 定位纠偏方案
3.1 多套光电传感器配合
在实际使用中,吸尘机器人的工作空间会由于地表不平等因素在移动中都会偏离预计的路线。本设计利用新的移动平台和多冗余度光电感知系统,并结合特征点匹配(比如充电座、比如障碍物的转角)的软件辅助定位方案,并对这些数据进行融合处理,结合模糊控制算法[9],实现机器人定位纠偏的精度提高。
传统移动机构移动中位置变化相对稳定的只有两个驱动轮连线的中心位置,最多能搭载一套光电移动检测传感器,容易产生误差。而本研究采用不需转弯的行走机构,因而可以在机器人底部4个角附近安装4套光电移动检测传感器,机器人每移动一步,传感器均能记录其在横向移动了多少、在纵向移动了多少。同时,可利用对光电传感器的检测,自动调整驱动行走轮、辅助行走轮、纠偏轮转过固定角度所需要的脉冲宽度(PWM)。可供选择的移动检测传感器还包括超声波、激光测距传感器方案[10,11]。
3.2 海绵接触型传感器
面粉厂由于原料、货物、人员流动性较大,造成厂房内障碍物位置的随意性增大,为避免吸尘机器人与工作空间内的货物、生产设备发生碰撞,造成不必要的损失,本研究设计了海绵接触型传感器。它是在吸尘机器人外壳上覆盖一层有一定厚度的海绵,并在海绵下安装薄膜式微动开关。当安装接触传感器的机器人遇到障碍物时,表面的海绵受压,压力迅速被海绵吸收并传递到反面的塑料薄膜式微动开关上,相当于微动开关被直接压下,这样吸尘机器人便可感知某一方向上或某一部位遇到了障碍物。这种接触型传感器可利用海绵本身的张力固定在吸尘机器人表面所需安装的部位,具有工艺简单、安装方便、重量轻、成本低等特点。
4 方轮行走机构实例及性能分析
4.1 定位纠偏行走机构实例
按照上述原理设计的8个方轮的全方位行走机构[12,13]结构图见图5。
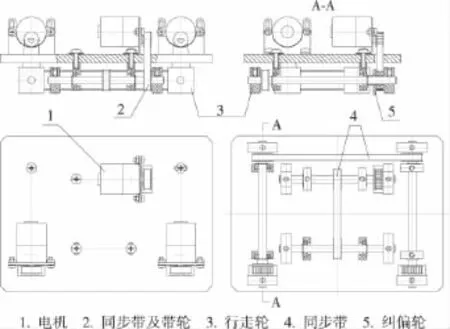
图5 八方轮行走机构结构设计图Figure 5 Structure diagram of 8quartet-wheels walking mechanism
经过变型设计,也可以设计成两轮驱动的方轮行走机构,结构见图6,实物见图7。
4.2 性能分析
按照行走机构的应用需求,既可选用步进电机驱动,也可选用直流电机[14]。若需实现控制精准则选用步进电机,但其成本高、驱动复杂、负载能力低;而采用普通直流电动机,则可降低成本、控制简单、易于实现大功率驱动。
由于采用“双向驱动”加上“凸轮纠偏”的设计,行走机构完全可以使其在前后、左右移动和调整方向3个动作上任意转换,不需要多余的时间和动作,遇到障碍时可以直接横向移动实现转向,省略了原地转向的动作,缩短了时间,提高了效率,节约了电能。
行走机构部件模块化、参数可调整、可重构特点使其具有很大的灵活性。如可根据使用规模、地面环境,采用不同功率和不同电压电机、不同长度和不同粗细轮轴、不同大小、不同形状、厚度及材质的行走轮、辅助行走轮和纠偏轮,得到适用的全方位行走机构[8]。
5 结论
以此全方位行走机构设计的吸尘机器人不仅能实现粉尘的全面清扫,而且具有行走准确,转弯便捷,成本低、控制精确、高效节能、配置灵活等优点;多套光电移动检测传感器和海绵接触型传感器配合,解决了机器人的移动控制和定位纠偏难题和与障碍物碰撞的难题。此全方位行走机构不仅可应用于面粉吸尘机器人,还可推广应用于自动地面打腊机、自动清扫机、自动拖地机、自动打磨抛光设备、自动割草机、扫雷机器人等装置,具有广阔的应用前景。
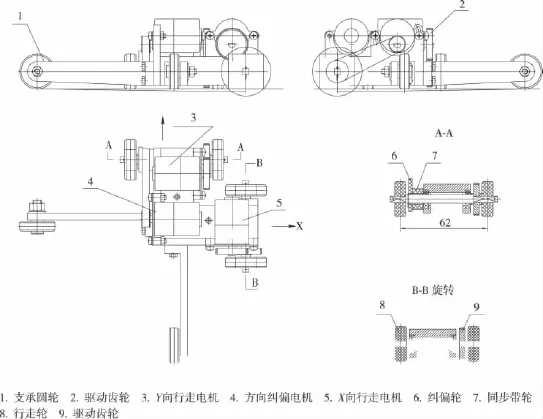
图6 两轮驱动的四方轮行走机构图Figure 6 Diagram of two-wheel driving for quartet-wheels walking mechanism
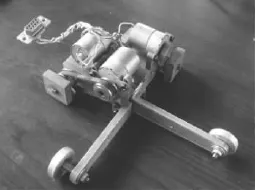
图7 两轮驱动的四方轮行走机构实物Figure 7 Diagram of the practical omni-directional and correcting position for mobile robots
1 宗兆辉,张海洪,李治斌.一种轮式机器人全方位移动机构的研究[J].机械制造,2011,49(3):14~16.
2 刘洲,吴洪涛.Mecanum四轮全方位移动机构运动分析与仿真[J].中国制造业信息化,2011,40(5):43~46.
3 王一治,常德功,钱晋武.适应不平地面的Mecanum四轮全方位小车结构及运动学模型[J].中国机械工程,2009,20(9):1 130~1 133.
4 周卫华,王班,郭吉丰.连续切换轮及其移动机器人的自锁特性[J].机器人,2013(7):449~455.
5 Kyung-Seok Byun,Sung-Jae Kim,Jae-Bok Song.Design of continuous alternate wheels for omnidirectional mobile robots[C]//IEEE International Conference on Robotics and Automation.Piscataway,USA:IEEE,2001:767~772.
6 Mark West,Haruhiko Asada.Design and control of ball wheel omnidirectional vehicles[C]//IEEE International Conference on Robotics and Automation.Piscataway,USA:IEEE,1995:1 931~1 938.
7 南景富,刘延斌,牛广林.轮式移动机器人的运动及定位分析[J].机械设计与制造,2007(7):148~150.
8 周晓东,胡立德,刘建.一种小型移动机器人行走机构的设计与分析[J].机械,2009,36(4):14~17.
9 潘永惠.吸尘机器人系统设计与避障算法研究[J].电子技术应用,2013,39(6):130~135.
10 罗胜.吸尘机器人的现状及其智能系统的若干关键技术[J].传感器与微系统,2007,26(11):5~9.
11 (美)丹尼斯·克拉克,迈克尔·欧文斯.机器人设计与控制[M].北京:科学出版社,2004.
12 张少文,吴学梅.新型烹饪机器人锅具运动机构的设计及运动学仿真[J].食品与机械,2013,29(4):92~94.
13 张周新.物体的行走机构:中国,CN200910025202.0[P].2010—08—25.
14 王三武,刘进.清扫机器人移动驱动机构的研究[J].机械制造与自动化,2008,37(5):105~107.