舰船动力系统动态建模仿真与分析
2014-12-19刘舒婷
刘舒婷
(长春建筑学院,吉林 长春130607)
0 引 言
近年来,随着我国舰船数量和质量的不断提高,特别是“辽宁”号航母的服役,舰船的动力和动力系统的研究吸引了广大专家学者的兴趣[1-2]。传统舰船的动力主要来源于依靠蒸汽机技术和内燃机技术所使用的化石燃料,电力所占的比重较低;舰船上的电力系统往往也独立于动力系统,动力系统通常由常规的热机和其他机械装置构成,电力系统一般只起辅助作用,与舰船推进并没有直接的关联[3-4]。然而最近几十年中,伴随着现代舰船的发展,特别是核动力航母的发展,电力技术正逐渐成为舰船的主要动力,将电力技术和舰船推进系统相结合,正显示出强大的优势和生命力,电力作为舰船推进动力逐步成为明晰的发展方向。对于电力系统的研究,也正越来越成为舰船动力系统的主要研究方向[5]。
舰船动力系统的主要动力来源是舰船电力,因此,舰船动力系统的设计主要就是将舰船的发电设备和用电设备有机地结合成一个统一的整体系统,从而对舰船发电、配电和用电等多模块实现统一的调配和控制。本文基于PSCAD/EMTDC 软件[6-7]建立船舶动力系统动态仿真模型,为检验系统接口动态电能品质提供分析平台。舰船动力系统仿真建模的关键是舰船发电机系统和舰船负荷的模型建立,对发电机系统的建模分析,可以有利于舰船负责人准确的把握舰船动力的产生以及工作的稳定状况;对负载模型的建立,有利于分析各个负荷对船舶电力系统所造成的实际影响。
1 舰船动力系统的组件模型
1.1 系统的发电机模型
同步发电机是社会经济活动中最常用的一种交流式发电机,常被用来分析电力系统的瞬时特性和稳态特性。EMTDC 模型库为用户提供了标准的发电机模型。在实际的发电过程中,工作人员设定的发电机电压值和实际产生的电压往往存在一定的差距,这就需要使用电压调节器对发电机产生的电压进行调整。自动电压调节器是一种可以自动调节电压的装置,主要包括电压测量及比较模块、PI 调节和PWM 波调制模块、电路系统驱动器和功率模块等组成,具体流程如图1 所示。
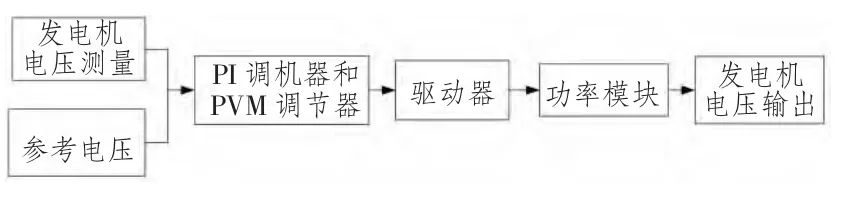
图1 电压调节装置流程图Fig.1 The flow chart of voltage regulation device
发电机工作时,确保发电机机组的转速在一定的误差范围是系统稳定的重要组成部分,因此,对机组的转速进行监测和控制调节很必要。汽轮机模型和柴油机模型是最常用的2 种发电机模型,为简化起见,本文采用汽轮机模型进行仿真设计。汽轮机调速系统主要包括转速测量放大、信号调节与伺服放大和执行等3 个主要功能环节。图2 所示为汽轮机模型的调速原理图。其中,调速系统的测量放大环节的增益K 决定了稳态转速的调节偏差。信号调节与伺服放大模块的主要作用是将处理后的调节信号进行一定倍数的放大,用于控制执行机构。执行模块采用反馈的设计方法,是整个调速系统的具体执行单元。
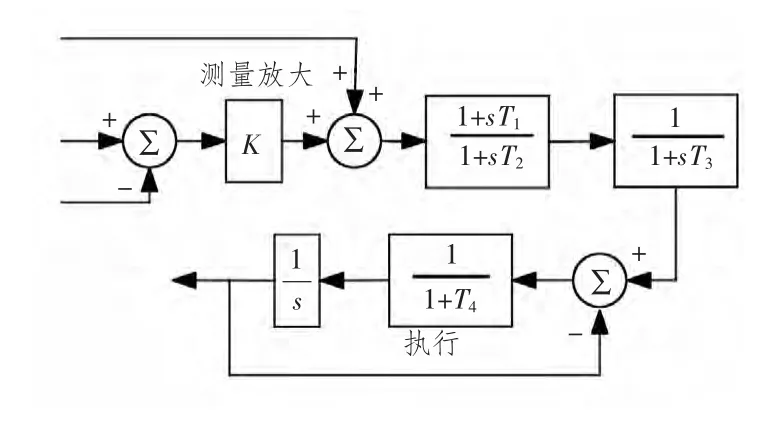
图2 汽轮机模型的调速原理图Fig.2 The steam turbine speed control principle diagram of the model
1.2 系统的负载模型
舰船电力系统中的负载种类和数量有很多,各负载的工作特性也有很大差异,目前典型的负载数学模型主要将系统的负载分为静态负载和动态负载两部分。静态负载主要是指ZIP 负载,动态负载主要是指异步电动机负载。
静态负载主要包括恒阻抗型、恒电流型和恒功率型以及这3 种互相组合的负荷,各负荷的比重依据实际情况有所不同。在EMTDC 中,恒阻抗负荷直接采用电阻电容电感模型构成,恒电流负荷可采用电流源控制模型,恒功率负荷,可以通过受控电流源模型的电压反馈来实现。
异步电动机是实际船舶系统中常用的负载装置,EMTDC 模型库提供了异步电动机的模型。软件中提供的参数输入方式有多种,考虑到本文的具体情况,采用的模型参数输入方式是基于电动机的转矩-转差曲线,通过设置电动机的实际运行参数,如额定功率、额定转差、效率、启动电流/额定电流、最大/额定转矩等参数。
2 舰船动力系统的组件仿真分析
2.1 发电机装置的调速系统仿真分析
首先对发电机的仿真参数进行设置,主要参数设置如下:发电机额定功率为1.5 MW,1.125 MVar,功率因子选择0.8,输出电压额定值为400 V。采用恒功率负荷模型进行分析,负载从0 增加至满载的动态过程,用正向斜坡限幅函数表示,范围为[0,1.5];负载从满载减少至0 的动态过程,用负向斜坡限幅函数来表示,范围为[0,1]。在调速系统的调速仿真之下,发电机装置的输出功率和输出电压随时间的变化曲线如图3 所示。
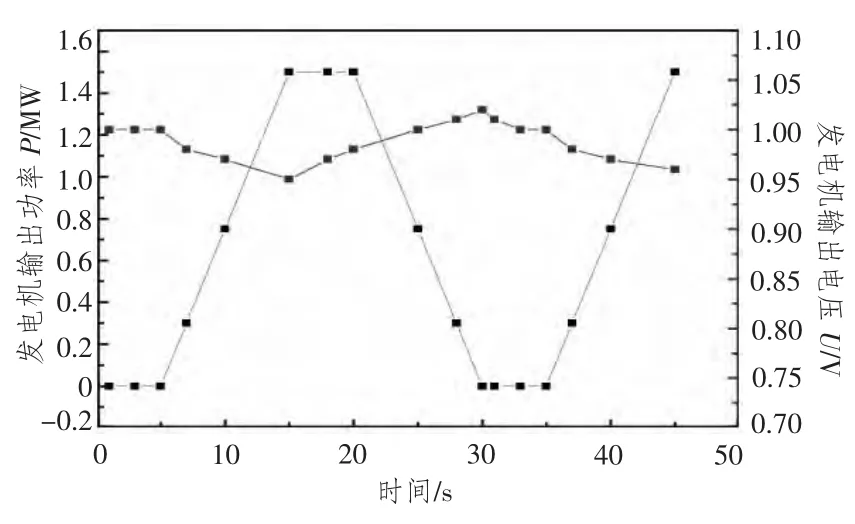
图3 发电机输出动率和输出电压随时间变化曲线Fig.3 The generator output rate and output voltage curve over time
由图3 的仿真结果可知,0 ~5 s 内,发电机在无负载的情况下稳定运行;发电机负载在5 ~15 s内由0 逐渐增加;15 ~20 s 发电机在满负载的情况下稳定运行;发电机负载在20 ~30 s 内逐渐减少为0;30 ~35 s 发电机无负载运行;之后重复前面的状态。发电机的输出电压基本稳定,偏差率约为5%。仿真结果表明调速系统基本满足发电机发电功率和发电电压的要求。
2.2 系统负载模型的仿真分析
舰船的负载主要包括静态负载和动态负载,本文重点对静态负载中的恒功率负载模型和动态负载中的异步电动机进行仿真分析。
恒功率负载模型是通过受控电流源模型的电压反馈来实现的。具体的实现方式是,设定负载的功率和功率因子,在系统正常运行的过程中,负载的电流随着负载的电压增大或减小而呈现相反的变化趋势,最终保证负载的功率基本维持不变。
恒功率负载的电压和电流值随时间的仿真变化曲线如图4 所示。仿真时间为4 s,输入端电压在2 s 时由380 V 突变至420 V,恒阻抗负载的功率为0.3 MW,额定功率因子为0.8。图5 中,恒功率负载输入端电流随着端电压的变化而变化且成相反态势,全过程中负载功率不变。
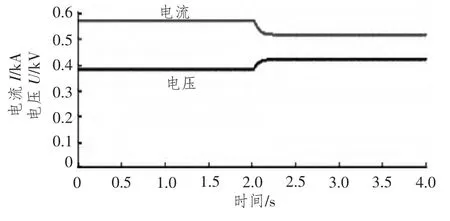
图4 恒功率负荷端电压、电流随时间变化曲线Fig.4 The constant power load terminal voltage,current curve of change over time
转速控制和转矩控制是异步电动机的常用控制方式,为简化起见,本文采用转矩的控制方式,并建立相应的模型。恒转矩异步电动机的仿真控制参数设置为:功率因子0.87,额定转矩2.0。仿真结果如图5 所示。

图5 电机转速和转矩随时间的变化曲线Fig.5 Motor speed and torque curve of change over time
从仿真结果可以看出,由于3 s 前电动机定子未通电,转速为0,3 s 后电动机开始启动,转速由0 上升,此时电动机电磁转矩很大,随后逐渐减小,与负载转矩相等时转速保持不变,为0.984。仿真结果表明,电动机模型基本符合需求,能够在设定参数下稳定地运行。
3 舰船动力系统的工况仿真分析
系统中有大量的A 类、B 类、C 类负载,各类负载的重要性不一,所有的负载并不是在同时运行的。为了模拟一个实际的稳态运行状态,选择工作负荷为:全部的A 类负荷、70%的B 类负荷、以及50%的C 类负荷。基于此,系统的负载主要包括各类静态负载、供电设备、消防泵、排水泵等,总功率为2.4 MW。
电力系统中,发电机往往先于负载启动。因此,发电机启动并稳定后,负载才可以开始启动工作。由于系统总负载较大,一次性加入全部负载会导致系统功率、电压、电流等指标出现剧烈突变而引起系统的不稳定,因此仿真过程中,将系统的全部负载分4 步添加到仿真系统中。当系统进入稳态后,配电控制板A 和B 及其各自的2 个子面板的电压和电流值的仿真结果如表1 所示。由表中可知,系统稳定时,各监测点的电压状态满足电压的暂态稳定性要求。
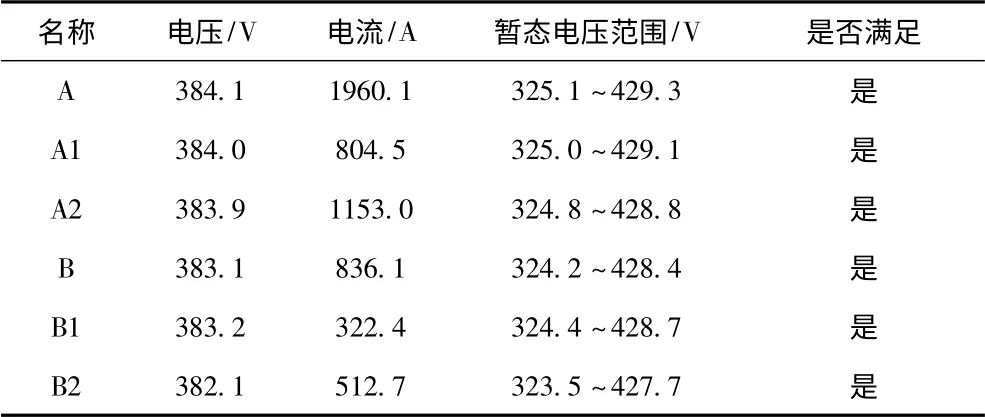
表1 配电控制板电压及电流值仿真结果Tab.1
图6 为系统从启动到稳定的全过程中,配电控制板A 及子面板A1 的电压随时间的变化曲线图。由图可知,分步加入负载后,系统中各点均能在不到5 s的时间内完成自我调节,最终保证电压值得稳定。由仿真结果可知,系统的瞬时电压始终处于暂态电压范围内,因此,系统的暂稳态特性满足要求。
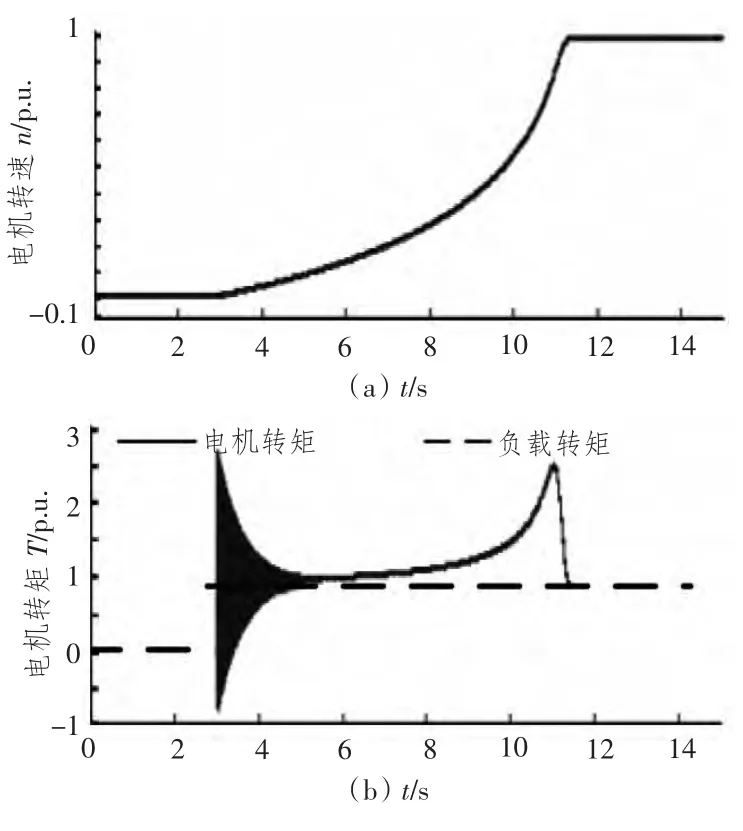
图6 配电控制板A 及A1 的电压随时间变化曲线Fig.6 The voltage of distribution panel A and A1 curve over time
4 结 语
随着舰船电气化水平的不断提升,电力正越来越成为舰船的主要动力。本文基于PSCAD/EMTDC软件,对舰船动力系统进行了动态仿真,首先对舰船动力系统的关键组件——发电机和负载进行了建模仿真,最后对整个系统进行了工况稳定性仿真分析。仿真结果表明,发电机、电动机等系统的各组件工作稳定,满足其组件特性;整个动力系统在工况下运行平稳,逐次添加负载后均能在5 s 内回归稳定状态。本文的研究成果可为舰船动力系统的设计与仿真分析提供一定的参考。
[1]马伟明. 舰船动力发展的方向——综合电力系统[J].海军工程大学学报,2002,14(6):1 -6.
[2]CLAYTON D H,SUDHOFF S D,GRATER G F. Electric ship drive and power system[C]. Power Modulator Symposium,2000.Conference Record of the 2000 Twenty-Fourth International.IEEE,2000:85 -88.
[3]闻雪友,肖东明.现代舰船燃气轮机发展趋势分析[J].舰船科学技术,2010,32(8):3 -6.
[4]肖杨婷,赵跃平,曹爽.国内外综合电力系统技术研究动态[J].舰船科学技术,2010,32(8):24 -29.
[5]GONG Yan-feng,HUANG Yan,SCHULZ N N. Integrated protection system design for shipboard power system[J].IEEE Transactions on Industry Applications,2008,44 (6):1930 -1936.
[6]纪锋,付立军,陈海建,等.基于EMTDC -Simulink 的综合电力系统混合仿真[J]. 船电技术,2008,28(1):1-4.
[7]吴韡,李光中,肖强晖.基于PSCAD/EMTDC 的舰船电力系统智能保护仿真研究[J].湖南工业大学学报,2011,25(4):64 -69.
