一种用于水声通信的快速自适应均衡器设计
2014-12-18蒋楚欧潘元璋
邱 政,蒋楚欧,潘元璋
(91388部队93分队,广东湛江 524022)
水声通信是当代海洋资源开发和海洋环境立体监测系统中的重要组成部分,随着水下军事及民用数据通信量的日益增加,通过水声信道进行数据传输的要求越来越高。在随机时变多途传播的水下声信道中,如何实现可靠通信是对通信和信号处理技术的严重挑战。为克服水声信道的多径衰落效应引起的码间干扰,水声相干通信中普遍采用信道均衡技术[1-3]。传统的线性均衡器是采用由发射机发送训练序列来辅助实现信道的估计和均衡,这在宽带资源有限的水声信道中效率较低,因此需要性能更强的判决反馈均衡器来均衡,而盲均衡器是信道均衡的良好选择,与其它传统的自适应均衡器相比,其无需参考输入的训练序列,仅依靠接收信号本身和发射信号先验信息对信道特性进行均衡补偿,大幅提高了载波恢复和相位信号检测的能 力[4-6]。 在 各 类 盲 均 衡 算 法 中,Godard 和Treichler等人提出的恒模算法(CMA)以其计算复杂度低、易于实时实现和较好的鲁棒性等优点得到了广泛应用。本文在分析传统CMA盲均衡算法收敛性能的基础上,针对算法采用固定步长使得收敛速度和收敛精度之间相互制约的缺点,提出了一种利用时变步长来代替固定步长的自适应变步长CMA盲均衡算法,并进行了计算机仿真及湖试的数据分析。结果表明,改进算法收敛速度快、剩余误差小,能够克服实际水声信道传输引起的相位偏移,具有较广的实际应用价值。
1 恒模算法原理及性能分析
恒模算法是Bussgang类盲均衡算法中常用的一种,其通过调节线性均衡器的抽头增益来达到使代价函数减小的目的。恒模算法的基本原理是,先建立一个代价函数,使理想系统对应于代价函数的极小值点,然后采用某种自适应算法寻找目标函数的极值点[7-8],所以自适应算法性能的好坏较大程度上影响着系统的均衡效果。图1为判决反馈盲均衡器示意图。其中,x(n)是发送序列;h(n)是未知信号的冲激响应;y(n)为系统接收序列,同时也是盲均衡器的输入序列;n(n)为噪声信号;w(n)为盲均衡器的冲激响应,通常采用有限长横向滤波器,x~(n)为被均衡器恢复的信号;x^(n)为判决输出信号;e(n)为均衡器输出信号相对于估计值的误差。

图1 判决反馈盲均衡器原理图
根据信号传输理论[9-10]和图1可知,均衡器的输入为

由上式可以看出,步长因子μ在算法收敛过程中起着重要作用,当采用大步长时,每次调整抽头系数的幅度就大,算法收敛速度和跟踪速度加快,但当均衡器抽头系数接近最优值时,抽头系数将在最优值附近一个较大范围内来回抖动而无法进一步收敛,因而会有较大的稳态剩余误差和误码率。反之,采用小步长抽头系数每次调整的幅度则小,稳态剩余误差较小,同时算法的收敛速度和跟踪速度也会相应减慢,由此可见,传统CMA算法由于采用固定步长时,使得算法的收敛速度和收敛精度相互制约。
2 改进的恒横算法
针对原始算法在收敛速度和收敛精度相矛盾的缺陷,为进一步提高CMA算法的性能,提出了一种将剩余误差MSE的一种变换作为控制步长参量的变步长恒模算法[9-10],其具体实现如下:
考虑剩余均方误差MSE为

显然MSE(n)在收敛条件下随迭代次数的增加而减小,因此通过MSE对步长因子的控制可以达到变步长算法的要求。于是权值迭代公式变为
式中,ζ(n)为零均值,独立同分布的噪声信号。将上式代入剩余误差的表达式可得

式中,V(n)为权值误差矢量;β为比例因子,用于控制步长μ(n)的取值范围,显然当算法收敛后,MSE(n)趋于一个微小的值。用MSE控制步长的优势在于,当信道中有突发强干扰信号时,e(n)变大,但通过加窗取平均,就可以削弱干扰信号的影响,使MSE变化较小,这样可以减小因步长变化过大而引起的误调,故用其控制步长变化能满足自适应步长的要求。
3 仿真及实验分析
3.1 仿真分析
为验证改进算法的性能,通过计算机仿真上述算法,并与原始算法进行了比较。仿真条件:输入信号分别采用32QAM调制方式,信噪比为20 dB,波器阶数为13,实验运行总次数为3 000次,信道的冲击响应为H1(z)=0.005+0.009z-1- 0.024z-2+0.854z-3-0.218z-4+0.049z-5-0.016z-6。
图2给出了改进算法和原始算法的收敛曲线,从图中可以看出,在稳态误差基本相等的情况下,改进算法的收敛速度明显快于基本算法,而当收敛速度相同时,改进算法的稳态误差要小于基本算法的稳态误差。同时从均衡前后的星座图可以看出,改进算法进行均衡后的星座更加集中、清晰,分离效果更明显,具有更小的稳态剩余误差和误码率。

图2 算法的收敛曲线图
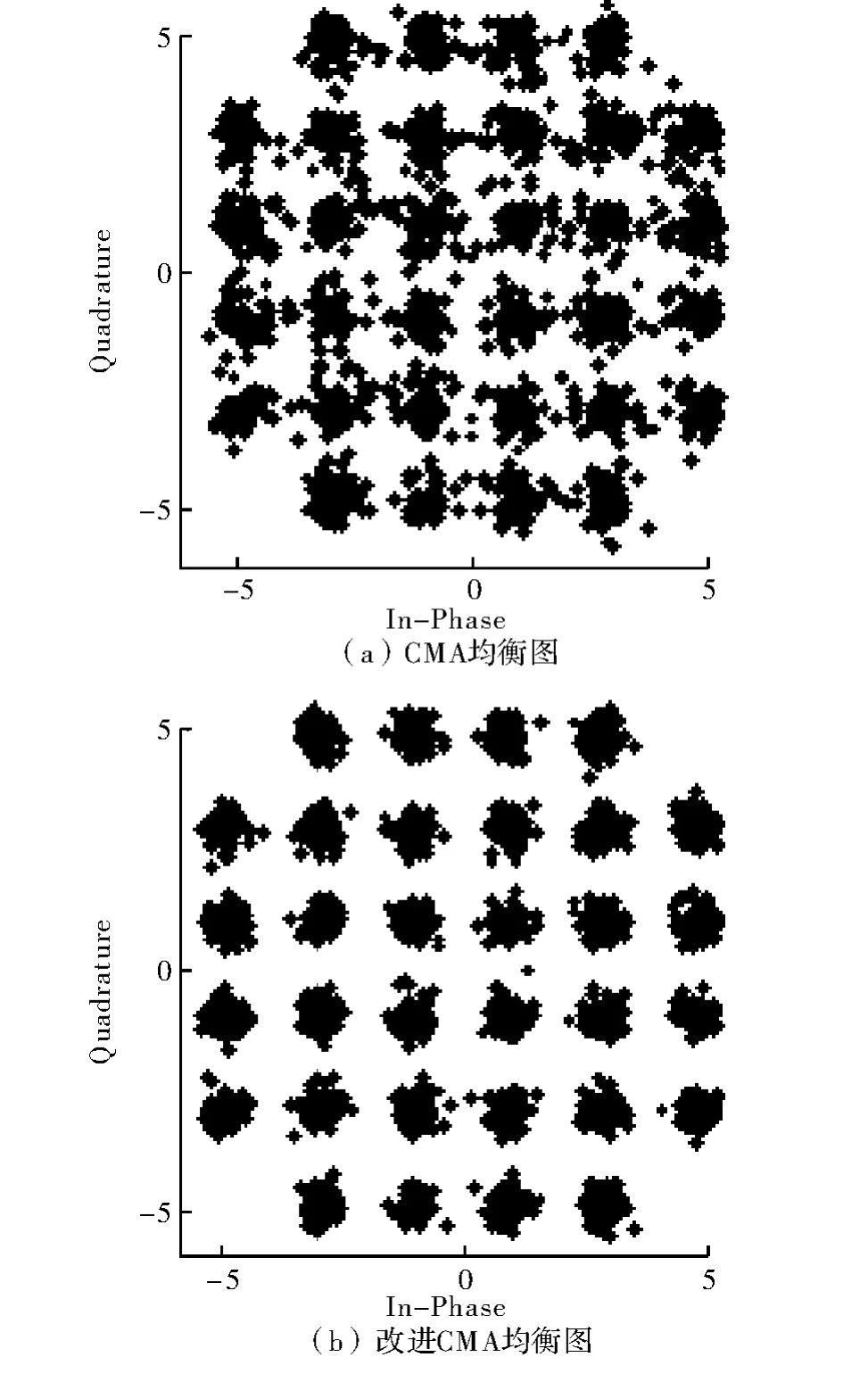
图3 均衡星座图
3.2 试验数据分析
通过仿真验证了改进算法具有更好的均衡效果,在算法设计实现后,将其应用于水声通信信道的试验,为直观起见,湖试数据以图像数据为主,数据接收后,对数据进行相关检测、解调、均衡、解码等处理,恢复出图像。图4和图5给出了均衡前后的星座图和图像信息,从图中可以看出,受到多径衰落等恶劣环境因素的干扰,不进行信道均衡时接收图像已严重失真,且星座图重叠模糊。当采用原始CMA算法进行信道均衡后,星座图已逐渐分开,取得较明显的图像恢复效果,但是图像有失真现象,误码率较高。而采用改进算法恢复的图像,图像能够清晰地被还原,星座图各部分已完全分离,最低失真度的恢复了图像,误码率达到10-3的量级,进一步证明了上述结论。
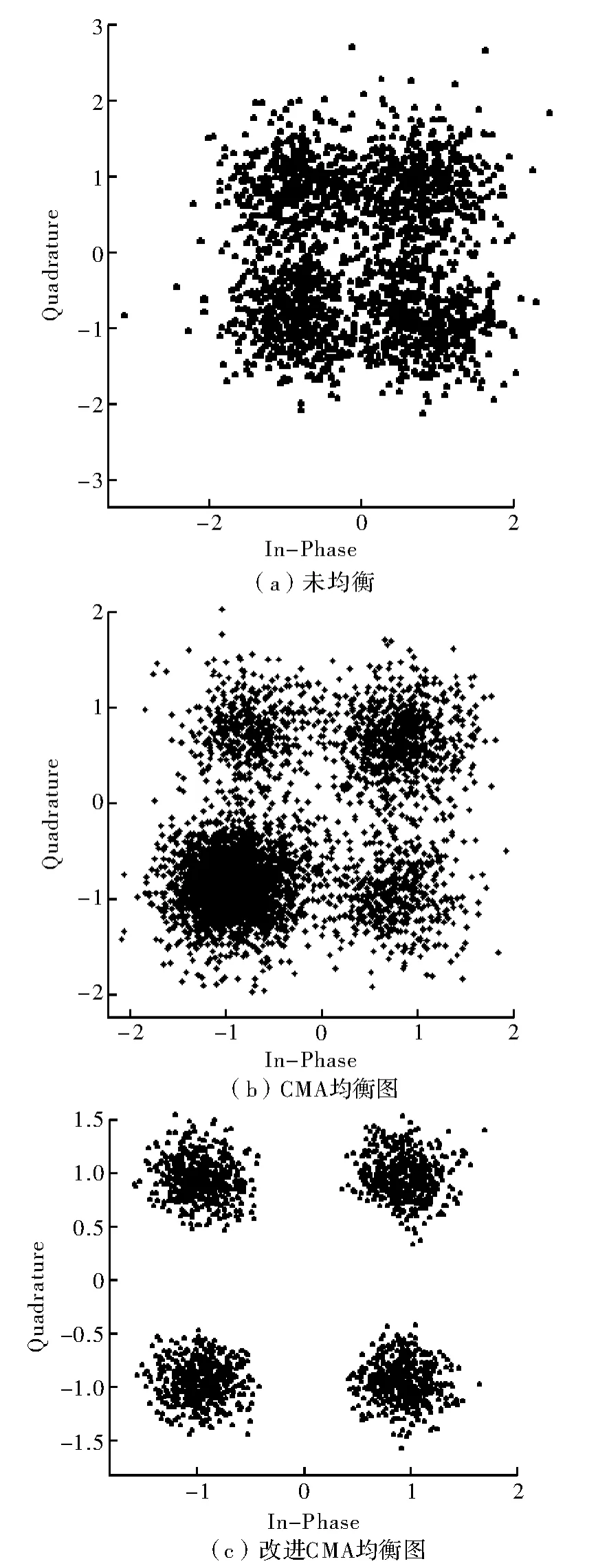
图4 均衡星座图
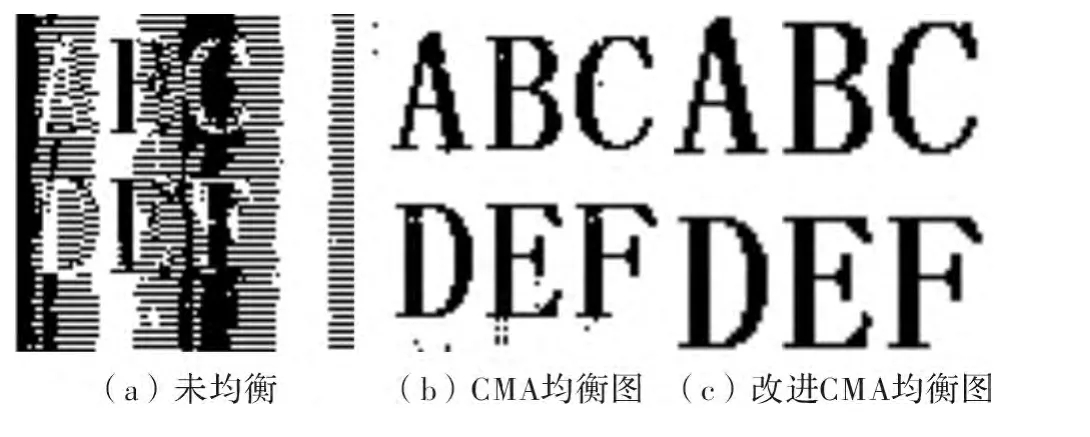
图5 均衡前后接收图像
4 结束语
信道均衡是高速水声通信系统中克服码间干扰的一项关键技术,如何提高均衡器的性能是目前研究的热点课题。本文分析了盲均衡器的特点,提出了一种利用时变步长来代替固定步长的自适应CMA盲均衡算法,并进行了计算机仿真及试验测试。结果表明,改进算法收敛速度快、剩余误差小,具有较好的均衡效果,能够有效抑制实际水声信道的码间串扰,同时可以广泛地应用于数字通信、雷达和图像处理等盲信号处理领域。
[1] SATO Y.A method of self-recovering equalization for multilevel amplitude - modulation systems communications[J].IEEE Transactions on Communication,1975,23(6):679 -682.
[2] ALBERT B,MAURICE G.Blind equalizers[J].IEEE Transactions on Communications,1984(32):871 -879.
[3] SCHNITER P,JOHNSON C R.Dithered signed - error CMA:robust,computation,efficient blind adaptive equalization [J].IEEE Transactions on Signal Processing,1999(47):1959-1597.
[4] NELATURY S R,RAO S S.Increasing the speed of convergence of the constant modulus algorithm for blind channel equalization [J].IEEE Transactionson Communication,2002,50(6):872 -876.
[5] FRANCO M.Channel estimation and equalization for M -QAM transmission with a hidden pilot sequence[J].IEEE Transactions on Broadcasting,2000,46(2):134 -136.
[6] 张雄.基于Bussgang技术盲均衡算法的研究[D].太原:太原理工大学,2003.
[7] 姚春峰,陈健,阔永红.几种盲均衡算法的原理与仿真试验研究[J].电子科技,2007,20(5):30 -33.
[8] 张玲.无线通信中的恒模类盲均衡算法研究[J].通信技术,2007,40(12):72 -74.
[9] 肖瑛,李振立,董玉华.变步长常数模盲均衡算法研究[J].通信技术,2008,41(5):47 -49.
[10]朱小刚,杨荣震,诸鸿文.盲恒模均衡算法的比较分析和改进[J].通信技术,2002,6(4):16 -18.
