电磁技术的“章鱼”爬壁机器人的研究
2014-12-18姚洪平尚晓新
姚洪平,尚晓新
(1.河北联合大学 轻工学院,唐山 063009;2.河南省开封市技师学院,开封 475000)
0 引用
机器人类别众多,分类方式多样,其中爬壁机器人是一种将地面机械移动机器人与吸附技术有机相结合的机器人[1]。实现对高空抢险救灾作业,墙体清洗,石化管道外壁检测等,是一种新型的机器人[2,3]。
爬壁机器人的研究主要可分为:多体柔性永磁爬壁机器人,磁隙式爬壁机器人,小型吸附式爬壁机器人机械结构及平衡性以及柔性静电吸附技术的爬壁机器人[4~6]。柔性爬壁机器人的吸附系统的课调节性等多类问题得到了较好的解决[2]。国外,美国某大学已经成功研制出具有4个“腿轮”的爬壁机器人样机,日本宫崎大学也研制出具有两个旋转叶片的“飞行机器人”等[1],该类研究对机器人的研究具有一定的积极作用,使得爬壁机器人的研究迅速成为国际热点问题[7]。然而,爬壁机器人涉及的问题较多,学科交叉复杂,需要解决和完善的工作还很漫长。因此,本文基于爬壁机器人的发展需求,并通过章鱼腕足上的吸盘有助于章鱼身体的固定的类比,本文设计了“章鱼”爬壁机器人。通过“章鱼”爬壁机器人的研究,将对爬壁机器人的研究具有一定的参考作用。
1 设计原理及工作流程
吸附方式包括负压吸附、磁吸附、推力吸附等,结合每类吸附方式的优缺点,本设计选择灵活性高、可靠性强且适合本机器人运动的电磁式吸附[1,8]。电磁铁利用电磁感应原理,通电后产生磁场,在铁芯上产生电磁力。本文选用吸盘电磁铁,具有结构紧凑,体积小,吸力大,全密封,环境适应性强等特点[9]。
“章鱼”爬壁机器人的控制系统主要由三部分组成,分别是信息采集系统、主控系统和执行机构,其中信息采集系统主要由传感器模块和通讯模块组成;主控系统由主控板(STM32单片机)组成;执行机构由驱动模块驱动电磁铁、关节电机与液压系统工作,工作流程如图1所示。因此,爬壁机器人采用吸盘电磁铁作为机器人吸盘的动力来源,通过电磁铁的通断电来达到对被吸附平面吸附与否的控制,为机器人的运动规划控制提供固定约束依据。
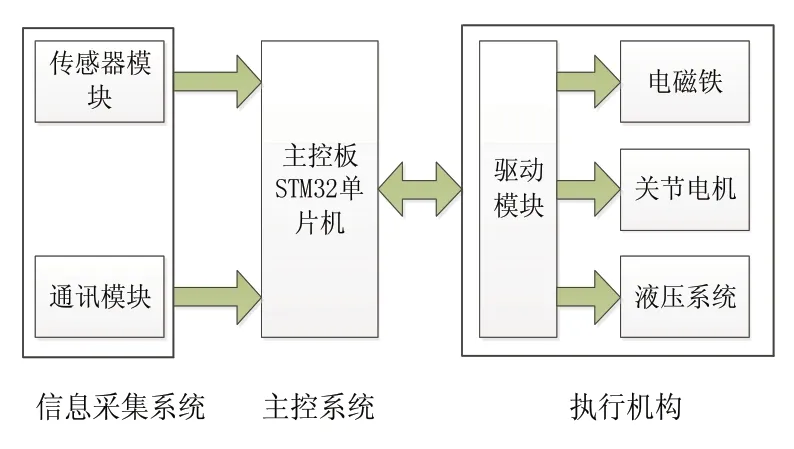
图1 工作流程图
2 “章鱼”爬壁机器人的设计与分析
如图2所示为“章鱼”爬壁机器人的示意图。
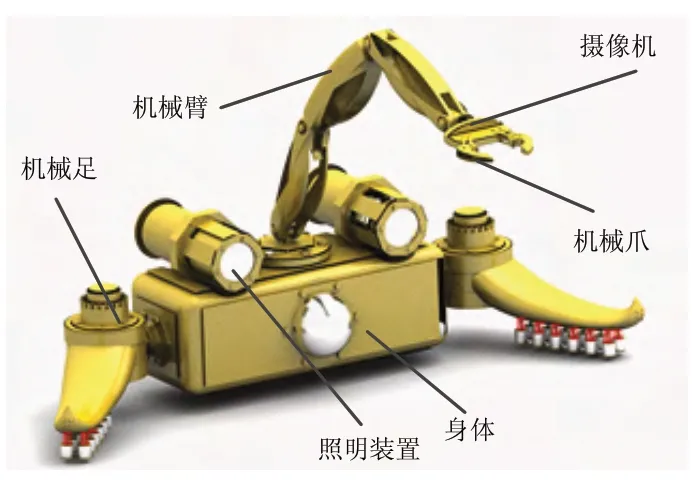
图2 “章鱼”爬壁机器人的示意图
该机器人的机械结构主要由三部分组成:身体、左右足(包括由吸盘电磁铁等零件构成的吸附机构)和工作机构(机械手爪、摄像机、探照灯等)。
2.1 吸附机构的设计
机器人的左右足的结构借鉴了章鱼腕足的结构,整体呈流线型,能有效减小粘滞阻力,吸盘电磁铁的灵感来源于章鱼肉质吸盘,电磁铁可在弹簧和液压系统的控制下伸缩。
电磁铁吸附的表面要求尽可能平整,则电磁铁的吸力会随着电磁铁与被吸附平面之间气隙的增加而显著降低,工作稳定性降低,甚至导致整个机器人从被吸附平面滑落[10]。所以减小电磁铁与被吸附平面之间的气隙大小是设计的重点之一。设计中,利用了平面曲率自由伸缩的弹簧与主动伸缩的液压杆两大机构来减小电磁铁与吸附平面的气隙,从而保证吸附的稳定。如图3所示为平面曲率自由伸缩的弹簧的示意图。
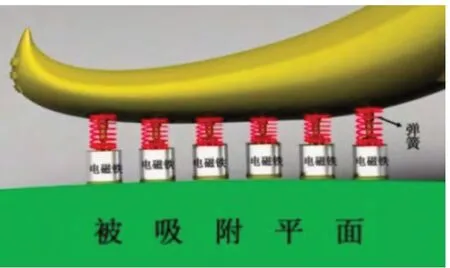
图3 自由伸缩弹簧的示意图
如图3所示,平面有一定的弧度,但由于吸附机构上有两排各六个弹簧,能够根据平面弧度自动调节伸缩长度,并最大限度的贴合被吸附平面,以减小电磁铁与平面之间的气隙,从而保证机器人的稳定性。如图4所示为主动伸缩的液压杆,液压杆的设计主要是弥补弹簧不能主动贴近被吸附平面的缺陷。对于弹簧不能紧密贴合的位置,可以采用液压主动伸缩的方式,使电磁铁与平面紧紧贴合,进而达到减小气隙的目的。
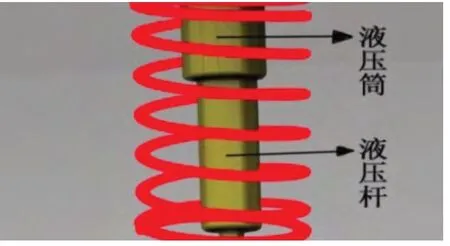
图4 液压杆
根据理论设计,保证足够数量的电磁铁吸附磁导性平面,再结合吸盘电磁铁吸力大的特点,能够满足机器人吸附稳定性的要求。
2.2 爬壁机器人分析
通过机械结构设计及理论分析,电磁铁通电后能产生足够的磁力吸住被吸附平面,使机器人的左足或者右足固定在被吸附平面上。机器人工作时,通电固定的吸附机构是受力矩最大的部位,同时由于尺寸较小,是应力最大的部位。因此,很有必要对吸附机构进行有限元分析,以确定机器人关键部位各零件的尺寸和材料。论文假设在液压筒的一端施以大小为50N的力,同时将电磁铁的一端端面固定,如图5所示。

图5 吸附机构受力图
在确定了约束等条件后,利用Inventor的有限元分析功能得到吸附机构的Mises等效应力图如图6所示。
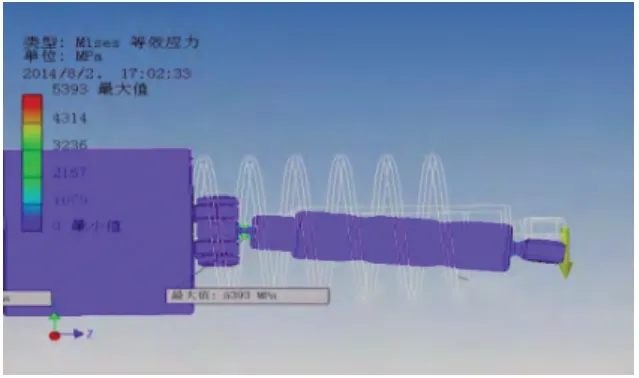
图6 Mises等效应力图
为了增加应力分析的准确性和更加全面的了解机构在受力情形下的位移情况,同时得出机构的第一个主应力图、第三个主应力图、位移图、安全系数图分别如图7~图10所示。
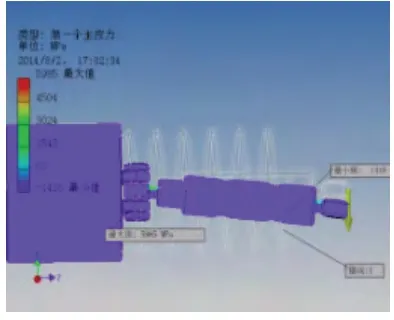
图7 第一个主应力图
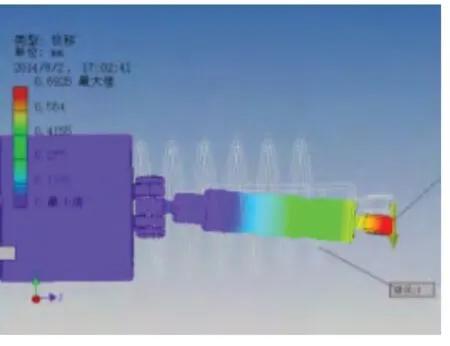
图9 位移图
从有限元的分析中我们看到吸附机构在液压杆的过渡处应力最大,安全系数也最低,最容易发生强度破坏。因此,对于液压杆在过渡处直径的大小设计和材料选择就比较重要,其机械结构材料选择牌号为Q345E的低合金高强度结构钢,并能够满足液压杆的强度需要,但同时应该适当增大液压杆过渡处的直径大小。
3 机器人的控制系统
爬壁机器人的控制系统主要由信息采集系统,主控系统以及执行机构系统三部分组成,如图1所示。
3.1 信息采集系统
信息采集系统是爬壁机器人收集信息的主要途径,机器人配有摄像头传感器,而其他的传感器可以根据实际应用需要增加,例如需要在深海探测时可加上声纳传感器等。
该机器人的通讯模块采用短距离、低功耗的无线通信技术(Zigbee)。广泛应用于自动控制和远程控制领域,可以嵌入各种设备。该机器人的Zigbee模块如图11所示。
图11 Zigbee通讯模块
3.2 主控系统
该机器人的主控系统采用STM32系列单片机。STM32系列单片机具有低成本、低能耗和高性能等优点[10,11]。其中CAN总线易于增加节点,从而使得增加传感器相对简单,对于改进机器人的工作机构非常有利。而STM32单片机多达一百个引脚和高速度的处理能力足以控制整个机器人的运动与工作。
3.3 执行机构
如图12所示为吸盘电磁铁驱动模块电路,由于电磁铁只有开和关,两种状态,所以使用三极管组成电子开关作为电磁铁的驱动模块。
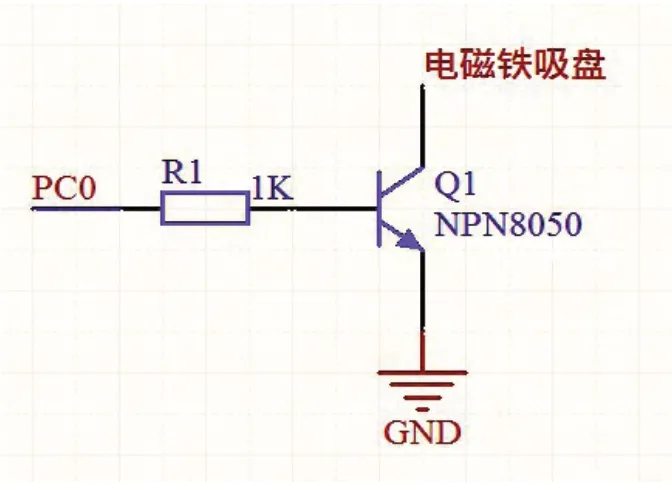
图12 电磁铁吸盘驱动电路
电机驱动模块根据机器人对运动定位的精度要求,因此,图13所示的电机驱动方式,此驱动方式与STM32主控机能很好地兼容,可以控制速度、方向并且体积小,重量轻。图13为两肩部电机的驱动电路。
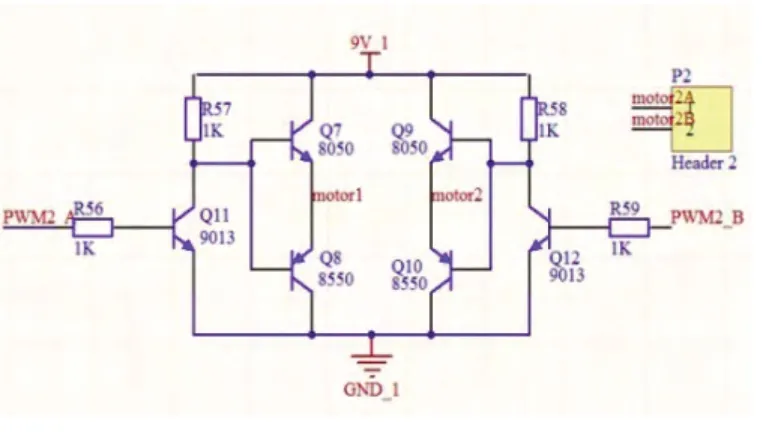
图13 电机驱动电路
4 结论
论文借鉴章鱼腕足的结构设计了仿生爬壁机器人,对其机械机构进行了概述。同时对爬壁机械足的结构进行了有限元分析,该分析结果有助于爬壁机器人的结构设计与材料的选择。
同时对机器人的控制部分的组成进行了分析,其结果能够有效的满足机器人的运动。该爬壁机器人的设计为爬壁机器人的研究提供了参考作用。
[1]付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008,25(4):1-4.
[2]桂仲成,陈强,孙振国.多体柔性永磁爬壁机器人[J].机械工程学报,2008,44(6):177-182.
[3]Santos,D.;Heyneman,B.;SangbaeKim;Esparza,N.;Cutkosky,M.R.;“Geckoinspiredclimbing behaviors on vertical and overhanging surfaces”,2008.ICRA,2008:1125-1131.
[4]黄之峰,王鹏飞,李满天,等.基于柔性静电吸附技术的爬壁机器人研究[J].机械设计与制造,2011,6(6):166-168.
[5]Yamamoto,A.;Nakashima,T.;Higuchi,T.;“Wall Climbing Mechanisms sing Electrostatic Attraction Generated by Flexible Electrodes”,Micro Nano Mechatronics and Human Science,2007:389-394.
[6]薛胜雄,任启乐,陈正文,等.磁隙式爬壁机器人的研制[J].机械工程学报,2011,47(21):37-42.
[7]刘明芹,戴永雄,黄文攀,等.小型吸附式爬壁机器人机械结构及平衡性[J].机械设计与制造,2011,5(5):146-148.
[8]崔旭明,孙英飞,何富君.壁面爬行机器人研究与发展[J].科学技术与工程,2010,10(11):2672-2676.
[9]张培锋,王洪光,房立金,等.一种新型爬壁机器人机构及运动学研究[J].机器人,2007,29(1):12-17.
[10]武丽君,吴善强.间隙式单吸盘爬壁机器人动力特性分析[J].科学技术与工程,2012,12(31):8271-8274.
[11]张国平,杨杰,高婧宇.爬壁机器人真空吸附及运动方式探讨[J].液压气动与密封,2007,1(1):11-13.
