横向补给状态下两船的摇荡运动特性
2014-12-07何学军谭智尤
何学军,谭智尤,余 鹏
(海军工程大学 勤务学院,天津300450)
0 引 言
目前,我国设计的综合补给船上干、液货横向装置采用的都是高架索法的形式,对高架索补给系统的研究也越来越多。航行于海洋中的船舶,在风、浪、流等外在激励的扰动作用下将产生摇荡运动。摇荡运动对船舶的航行安全及营运效率都会产生不利的影响,当摇荡幅度过大时甚至导致船舶倾覆事故。
根据船舶的耐波性[1]要求,要使船舶在波浪上具有优良的横摇性能,一是设法增加横摇阻尼,如安装减摇装置;二是航行中随时调整航速、航向。浮体运动分析从Froude 对横摇运动的研究,发展到无航速、有航速时船舶的摇荡三维流体动力学计算[2]。勾莹,滕斌等[3]应用边界积分方程方法研究了波浪与2个相连三维浮体的相互作用问题,并考虑了两浮体之间的水动力干涉。何林、黄胜[4]等分析补给航行中两船之间的水动力和对船舶操纵的影响,为舰船海上横向补给间距、航速以及补给站位的优选提供一定的技术指导。石丽娜[5]以拖船和一条无自航能力的被拖船所组成的拖航系统为研究对象,采用AQWA 程序对该系统进行仿真,研究和分析了影响拖航系统性能的各种因素。
1 两船有限元模型的建立
以两船横向补给系统为研究对象,以三维建模软件UG 建立仿真模型,利用多体水动力学分析软件AQWA 对其进行仿真分析。AQWA[6]具备完整的船舶与海洋结构分析能力,本文主要用其AQWA-Line、AQWA-Naut和AQWA-Drift 模块。两船具体参数如表1所示,进行适当的参数设置后得到的有限元模型如图1所示。

表1 补给船和接收船的主尺度参数Tab.1 Principal dimensions of two ships

图1 两船的有限元模型Fig.1 The FEM of the two ships
2 横向补给状态下两船耦合运动方程
高架索连接下补给船和接收船两船联立运动方程可表示为[7]:

式中:ω为入射波频率;Mijd,Mijr分别为补给船d和接收船r的质量阵;μij,λij分别为流体附加质量矩阵和附加阻尼矩阵;Cij为静水恢复力矩;ηj为浮体运动响应列阵;Fi为波浪激励力列阵;TF为高架索瞬时张力。
高架索瞬时张力在其船舶运动方程中可用系数矩阵表示为:
式中:HA=Tcosα;VA=Tsinα;HB=Tcosα;VB=Tsinα。其中HA,VA和HB,VB分别为补给门架和接收门架上的挂索点的水平张力及垂直张力;xA,yA,zA和xB,yB,zB为两船挂索点相对于各自舰船重心处的x,y,z 向坐标;T为高架索恒张力;α为索道与y 轴方向的夹角。
3 两船摇荡运动特性数值计算结果及分析
船舶航行时,作用于船上的波浪周期已不是波的真实周期,而应是遭遇周期。航速、航向改变了波浪遭遇周期,从而影响船舶在波浪上的摇荡运动性能。取高架索运送货物2 t,高架索恒张力T 取90 kN,索道与Y 轴夹角为α =180°-4.0°,发送柱高10 m,接收柱高5 m,补给点高度差为5 m。取两船船中在同一平面上,两站同时补给,两补给占位纵向相距50 m,船舷横向间距60 m,无限水深。
图2 分别是正迎浪补给时补给船在不同航速下的横摇、垂荡和纵摇辐射阻尼、RAO 频响曲线。相对于横摇运动,船速对船舶迎浪航行时的垂荡和纵摇运动影响较大。航速越大,横摇辐射阻尼的变化并没有引起峰值频率明显变化;垂荡、纵摇运动阻尼力不可忽略,其中航速对纵摇阻尼影响比对垂荡阻尼影响更明显,RAO 峰值频率也有明显变化。故不能把静水有阻尼垂荡、纵摇周期看作是有航速时的垂荡、纵摇固有周期。
随着航速的增加,横摇、纵摇运动幅值随之增加,垂荡运动幅值则变化不定;同时纵摇运动幅值峰值继续向低频区移动,更加远离其纵摇固有周期,不易发生共振。考虑船舶操纵性的需要,航速不能太低,同时横摇和纵摇都具有较小的摇幅,存在一最佳的航速范围。

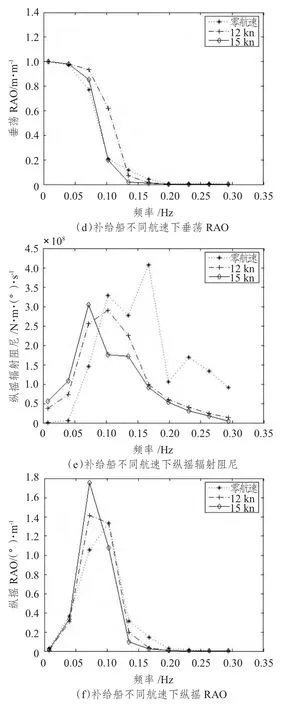
图2 补给船横摇、垂荡、纵摇的辐射阻尼、RAO 频响曲线Fig.2 Frequency response curves of Radiation Damping and RAO in the rolling,heaving,pitching direction
图3 给出了补给船各方向RAO 在不同浪向角下的频响曲线。相对其他浪向角,迎浪180°时具有较小的运动幅值响应。浪向角为145°时,补给船处于迎风面,其纵向运动幅值要大于-145°时的幅值,体现了大船对小船的遮蔽效应;但对横向运动则相反,其原因是大船对小船的水动力作用更明显,侧向力较大。其中垂荡和纵摇是六自由度运动中最为激烈的。
取P-M 波谱,有义波高取为3 m,跨零周期7.2 s。浪向角为-170°时,有、无高架索各自由度方向上的运动幅值时间历程响应作对比,其中无高架索即自由两船耦合运动幅值时间历程响应如图4所示。高架索下两船耦合运动幅值时间历程响应如图5所示。在高架索补给条件下,补给船的各运动幅值要小于自由两船耦合运动幅值,说明高架索张力的存在会减弱两船的耦合程度。


图3 不同浪向角下各自由度RAO 频响曲线Fig.3 Frequency response curves of RAO under different wave-to-course angles

图4 自由两船耦合横摇、垂荡和纵摇运动幅值时间历程Fig.4 Time history motion amplitude of two free-coupling ships
取浪向角-170°与正迎浪180°的时间历程进行对比分析,如图5~图7所示。由图可知,3个自由度方向上的幅值响应时间历程差别很小,迎浪180°只在横荡、垂荡方向上比首斜浪-170°时的略大,也再次说明了首斜浪-170°时大船对小船的纵向运动方向上的遮蔽效应。

图5 180°与-170°横摇幅值响应时间历程对比Fig.5 Time history motion amplitude comparison of rolling
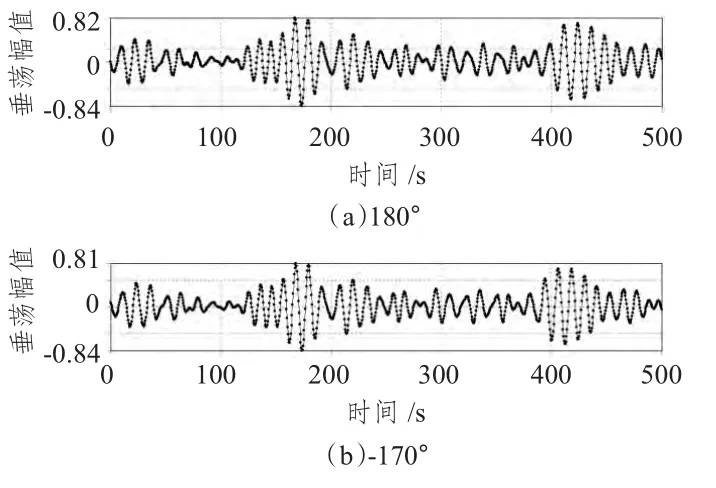
图6 180°与-170°垂荡幅值响应时间历程对比Fig.6 Time history motion amplitude comparison of heaving

图7 180°与-170°纵摇幅值时间历程对比Fig.7 Time history motion amplitude comparison of pitching
4 结 语
1)随着航速的增加,横摇、纵摇运动幅值随之增加;相对于横摇运动,船速对船舶迎浪航行时的垂荡和纵摇运动影响较大。考虑到船舶操纵性的需要,航速不能太低,补给过程存在一最佳的航速范围。
2)航行补给时,应尽可能地减小小船(补给船)的运动幅值,特别是垂荡和纵摇运动幅值,即是考虑小船在背风面补给,兼顾大船和小船其他自由度方面的运动需求,建议浪向接近迎浪。考虑到高架索的架设、货物在风浪中的摇荡安全和两船相离时的操纵性,取浪向约为-170°补给船在背风面进行补给。
[1]李积德.船舶耐波性[M].哈尔滨:哈尔滨工程大学出版社,2007,10.
[2]戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京:国防工业出版社,2008,1.
[3]勾莹,滕斌,宁德志.波浪与两相连浮体的相互作用[J].中国工程科学,2004,6(7):75-80.
[4]何林.补给航行中大型船舶受力分析及对航行性能的影响[D].哈尔滨:哈尔滨工程大学,2009.
[5]石丽娜.基于AQWA的大型浮体拖航性能研究[D].大连:大连理工大学,2011.
[6]邓文彬.船舶与海洋工程设计的领航员AQWA&ASAS[J].中国制造业信息化,2006(8):58-59.
[7]邓凯,李红涛,余建星.高架索航行补给中船舶在波浪中的运动性能研究[J].船舶力学,2009,13(2):217-225.
