人体助力行走机器人关键技术分析
2014-12-03王玉林宋慧新
王 超,王玉林,宋慧新
(中国北方车辆研究所,北京 100072)
人类一般用轮式交通工具运载沉重物体,但传统轮式车辆虽然能够运载较大重物却难以适应山地丛林等复杂路况;足式机器人具有较好的道路适应性却在环境感知和决策能力方面难以达到实际使用要求.人体助力行走机器人由于能够有效地结合人的智能和机器人较大的运载能力,成为了当前各国研究的热点[1].
人体助力行走机器人是一种以人为主、机械为辅的人机一体化的可穿戴式机器人.通过穿戴在人体上的外骨骼式的机械结构,人体助力行走机器人实现了对重物的支撑;通过电机、液压驱动机构等动力装置,实现了对人体各关节的助力运动;通过姿态感知系统感知人体运动姿态,实现了对人体运动的跟随和辅助.
19世纪30年代国外便出现了助力机器人的概念,从上世纪60年代末美国便启动了基于军事目的的人体助力机器人研制工作,如 Hardiman[2],但由于受当时技术限制,导致Hardiman的体积和重量过大,无法进行实际应用.随后尽管人体助力行走机器人经历过一段时间的沉寂,但到20世纪末,科技的发展和需求的凸显使得人体助力行走机器人再次进入了蓬勃发展阶段,美国、日本和俄罗斯等国均针对人体助力行走机器人开展了大量的研究工作.下面分别介绍一些人体助力行走机器人方面较为成熟的研究成果.
1 人体助力行走机器人研究现状
1.1 美国的人体助力行走机器人研究
美军很早就注意到了人体助力行走机器人的军事用途.美国国防高级研究计划局 (DARPA)于2000年提出了“增强人体机能的外骨骼(EHPA)”项目,目的是研制一种可穿戴式的,具有自适应能力的外骨骼式人体助力行走机器人.此项目资助了多家研究机构,当前美国的几种人体助力行走机器人均始于此计划.
1.1.1 洛克希德-马丁公司的人体助力行走机器人(HULC)
HULC是洛克希德.马丁公司推出的一款采用液压驱动的人体助力行走机器人,如图1(a)所示.该系统全重24 kg(含电池重量27.6 kg),最大的负重量可以达到90.7 kg.HULC是模仿人体结构特点设计的可穿戴型助力行走机构,不但能够直立行进,还可完成下蹲和匍匐前进等动作.穿上HULC后将能够明显降低对氧气的消耗量,试验数据显示,在使用者借助HULC背负36.7 kg重的物资以3.2 km/h的速度行进时,其对氧气的消耗量可比不穿该装置时少大约15%[3].HULC通过两块总重量为3.6 kg的锂聚合物电池供电.在一次充满电后,HULC可保证穿着者以4.8 km/h的速度背负90 kg重物持续行进1 h.而穿着HULC的冲刺速度最高可达到16 km/h.
1.1.2 雷神公司的人体助力行走机器人(XOS)
雷神公司在收购了参与EHPA项目的SARCOS公司后,也推出了其研制的第一代全身型人体助力行走机器人XOS.XOS能够在背负68 kg且手持23 kg的负荷时以1.6 m/s的速度行进,并可实现弯腰、下蹲和跪地等动作.2010年第二代XOS机器人问世,如图1(b)所示.第二代XOS人体助力行走机器人的能耗较第一代降低了一半,而且较第一代具有更强的负重能力,系统的灵敏度和响应速度进一步提升.但其缺陷在于能量消耗依旧较大,至今仍依赖地面供电.
总之,美国对人体助力行走机器人各方面的研究最为全面深入,呈百花齐放的状态,其研究水平位居世界前列.
1.2 日本的人体助力行走机器人研究
日本筑波大学于2004年推出了世界上第一款商业人体助力行走机器人 (HAL),当前已发展到第五代助力机器人HAL-5,如图1(c)所示.HAL-5是一种全身型助力机器人,其特点在于通过遍布全身的肌电传感器实现对人体运动信息的采集,并通过电机实现对各关节的助力[4].HAL-5重约15 kg,其能源供给装置小巧、使用时间长,但是由于使用了肌电传感器导致其穿戴复杂,且易受干扰,目前仅用于民用领域.除此之外,日本神奈川理工学院研制的采用气压驱动的动力辅助服和本田公司采用非拟人设计的助力机械腿也已经进入样机制造阶段.
日本对人体助力行走机器人的研究主要从民事应用入手,在机器人助残、护理及劳动的应用领域展开了广泛的研究.但是由于高密度能量系统及机器人姿态感知系统的缺陷,仍不能大量推广应用.
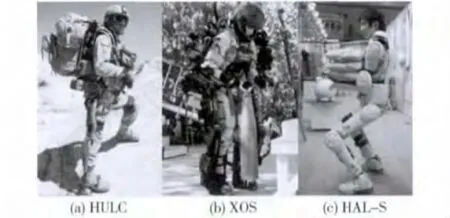
图1 国外代表性的人体助力行走机器人
1.3 国外其他国家的人体助力行走机器人研究
俄罗斯目前研制出了一款“战士21”的单兵作战服,其能够让士兵携带重物飞奔,且能够在电力耗尽时迅速脱下;法国防务公司与法国武器装备总署联合研制了名为“大力神”的协同可穿戴式助力行走机构,旨在使穿戴者能够轻松携带100 kg重物,其电池可使穿戴者以4 km/h的速度行进大约20 km.同时,韩国、意大利及新加坡等国家也有相关方面的研究,但由于均没有进行公开演示,故相关资料较少.
1.4 国内的人体助力行走机器人研究
目前国内开展人体助力行走机器人研究的主要有浙江大学、中国科技大学、华东理工大学及中国北方车辆研究所等大学和研究所.浙江大学主要进行人际耦合的层次式控制框架的研究,并设计完成了一种基于气动的助力行走机器人样机[5-6].中国科技大学在人体助力行走机器人的姿态感知及控制方法方面展开了大量研究,在相关姿态传感器方面获得了不少成果[7].华东理工大学也在做相关方面的研究,已完成了一套液压驱动的实物样机.中国北方车辆研究所在人体助力行走机器人的计算机虚拟建模及仿真方面做了深入研究,并在行走助力机器人用小型液压缸设计等方面有所突破.此外还有很多机构也展开了相关研究,如:海军航空工程学院对基于电机驱动的人体助力行走机器人进行了研究;北京工业大学在助力机器人机构设计方面进行了一定研究.
总体来看,由于国内在人体助力行走机器人研究方面起步较晚,大多处于理论研究阶段.同时由于资金支持力度较小,所设计的实物样机也均略显粗糙.
2 关键技术
人体助力行走机器人从功能上看,可分为以下几个子系统:助力机器人机械结构、动力输出及执行系统、姿态感知系统,控制系统.根据美国和日本对人体助力行走机器人的研究成果,并结合在进行人体助力行走机器人各系统设计过程中的经验教训,探讨助力行走机器人各系统的一些关键技术.
2.1 人体助力行走机器人的结构设计
人体助力行走机器人的结构设计直接影响机器人后续的各项性能指标,如何对助力行走机器人进行结构优化设计是机器人设计的重点和难点.
由于人体助力行走机器人具有帮助人体承载的用途,在机器人机构本体设计时应具有一定强度以便完成各种复杂工作.为保证机械机构具有足够强度,在设计时应该对诸如大、小腿等关键受力部件进行强化,同时使用Ansys等有限元软件进行强度分析[8].由于助力行走机器人自身携带能源有限,在机器人机构本体设计时应尽量减轻机器人的重量同时要有较高的机械效率以减少能源消耗.在设计时借鉴现代设计方法的思想,并积极引入先进材料,如碳纤维、钛合金等材料,在保证机械强度的前提下减轻重量;保证各部件结合处有效的润滑,提高系统的机械效率,降低能耗.由于助力行走机器人是人机结合式机器人,在机器人机构本体设计时应贯彻“拟人化”的设计思路以保证机构的安全性、舒适性和穿戴快速性.设置一些限位装置限制机器人的极限运动范围,保证其不大于人体关节运动范围;在人机结合处适当地引入一些软性材料,并积极采用仿生学设计,保证助力机器人的穿戴舒适性和快速性.由于助力行走机器人要完成仿人步态运动,在机器人机构本体设计时应科学地设计机器人的自由度以保证穿戴者能够顺利行走.各主要关节常见运动形式的运动范围如表1所示.
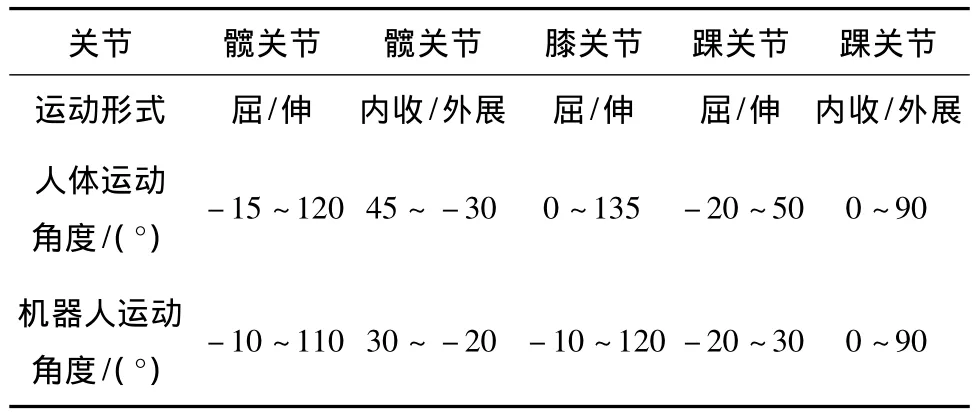
表1 人体及机器人各自由度运动范围
2.2 人体助力行走机器人的驱动单元
目前日本的HAL助力行走机器人采用电机驱动方案,美国的HULC助力行走机器人采用液压驱动方案,其两者各有优缺点.电机驱动方案的控制模式简单、直接,控制精度较高,后期使用费用低;但能输出较大扭矩的电机体积却较大,不宜布置,影响系统的灵活性.液压驱动方案的技术成熟、易于实现、过程稳定且易于控制;但是由于受其原理限制,制造及维护成本高,响应速度及控制精度相对较低.同时一些诸如气动肌肉等的新型驱动技术也被应用于机器人的驱动单元.相对而言,液压驱动单元的性能较为符合助力行走机器人的需求.
如何提高人体助力行走机器人驱动单元的性能是现阶段的工作重点,通过设计小型化高集成度的液压系统,降低油液在较长液压管路中的损失,提高系统效率;通过选用响应时间为毫秒级的高速电磁阀来提高液压执行器的响应速度;通过研制微小型专用液压油缸,实现对关节的助力,提高系统性能;通过采用基于PMW控制的高速开关阀来替代液压伺服阀[9],以降低系统成本.基于PWM高速开关阀的液压驱动系统的液压原理图如图2所示.
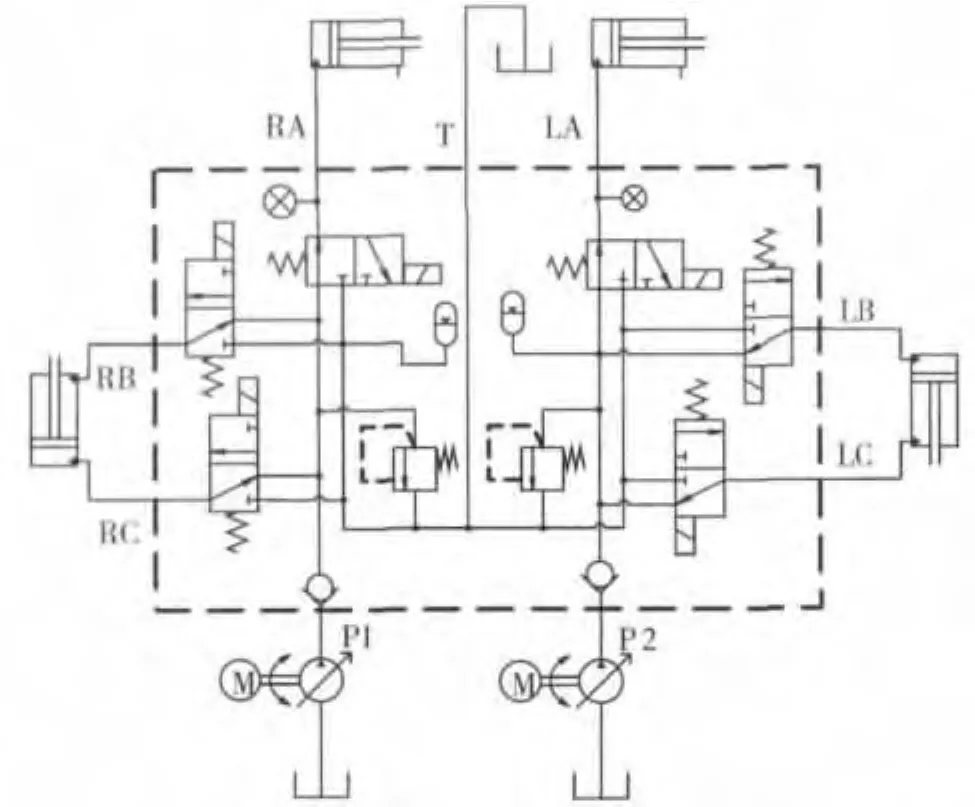
图2 助力行走机器人液压驱动装置原理图
2.3 人体助力行走机器人的姿态感知系统
为了实时感知穿戴者及助力行走机器人的姿态信息,需要在外骨骼及人体上安装多种类型的传感器.日本的助力行走机器人HAL-5主要通过贴在操作者皮肤上的肌电传感器采集穿戴者运动时肌肉产生的电信号,经过控制器处理后控制助力行走机器人跟随人体运动.但是采用肌电传感器存在诸多缺点:传感器布置时间长,易受外界干扰,肌电信号处理难度大.美国的助力行走机器人HULC则主要通过采集足部力信号来实现对姿态的感知.其足部安装有若干压力开关及一个压力油管和压力传感器,机器人通过采集压力开关的开关量及压力传感器的值来预测人体运动姿态,进而控制液压油缸的动作.此种姿态感知方式准确率高,穿戴方便,但对材料及控制的要求较高.
当前助力机器人的姿态感知系统可分为3个分系统:足底姿态感知系统,包括数个压力传感器及垂向加速度传感器,用于感知人体足底压力分布,测量足部加速度;下肢姿态感知系统,包括数个倾角传感器、角速度传感器及角加速度传感器,用于感知大小腿的位姿;躯干姿态感知系统,包含加速度传感器、角速度传感器及双轴倾角传感器,用于感知人体及机器人躯干部姿态.一种人体助力行走机器人的传感器布置方案见图3.
2.4 人体助力行走机器人的行走控制策略
人体助力行走机器人同其他机器人的最大区别在于穿戴者与机器人具有实际物理接触,通过控制实现人机耦合的一体化,形成人在回路中 (manin-the-loop)的系统[10],见图 4.

图3 人体助力行走机器人传感器布置图
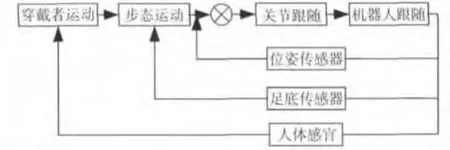
图4 人体助力行走机器人控制系统框架
一般在人体助力行走机器人控制中,会借鉴自主式两足机器人控制中的层次式控制法,通过将助力机器人的控制系统分解为3个相对独立又相互联系的功能层,实现对助力行走机器人的控制.行走规划层主要实现对人体运动信息的采集、分析和预测.步态综合层接受行走规划层传来的如步长、步速等的步态参数后,经过预定算法综合分析后,生成控制各关节处助力机构的指令.关节控制层就是在接受到步态综合层的指令后,实现对单个液压缸、电机等装置的控制,最终实现人体助力行走机器人的步态行走.在助力机器人行走时,传感器测得的各种数据也及时反馈到各层相应控制器中,以形成各层相对应的闭环控制.总之,在人体助力行走机器人控制系统设计时,需把握4个原则:降低行走干涉,降低系统复杂度和成本,具备自适应学习能力,简化控制策略.
3 发展趋势
随着科技的进步和机器人相关制造工艺的发展,人体助力行走机器人也将会变得越来越智能化、小型化.
1)具备较强的学习能力.
目前所使用的助力行走机器人的控制算法仅适合专人专机,难以根据不同人身体尺寸和行走习惯的差异作出自适应的调整,因此限制了其人体助力行走机器人的大量生产.所以发展具有较强学习能力的人体行走助力机器人成为了一个重要的发展趋势,只有具备了较强的学习能力,助力行走机器人才能够针对每个使用者学习出一套最适合该使用者的助力行走模式.
2)具备全身助力能力.
现阶段的人体助力机器人普遍仅对人体下肢进行助力,下一步应该逐步发展全身型的助力机器人,以进一步提高助力机器人的使用范围.
3)具备高性能能源和驱动方式.
当前采用的锂电池+电机驱动/液压驱动的方式虽然能够实现助力行走,但是现有锂电池的能量密度较低,导致系统持续工作时间较短,同时传统驱动方式的一些固有缺陷也限制了系统的灵活性.因此提高电池的能量密度,发展新型的驱动方式是以后的一个发展趋势.
4 结束语
人体助力行走机器人技术是一项涉及到生物力学、人机耦合、自动控制、机械设计、能源及传感器等多个学科的综合性技术,虽然近年来人们在许多方面取得了一定进展,但距离实用还有很长的路要走.相信随着科学技术的不断发展和人们认识的深入,人体助力行走机器人将得到更深入而广泛的研究.
[1]赵彦峻.人体下肢外骨骼工作机理研究 [D].南京:南京理工大学,2006.
[2]Dollar A M,Herr H.Lower extremity exoskeletons and active orthoses:Challenges and state-of-the-art[J].IEEE Transactions on Robotics,2008,24(1):144-158.
[3]Justin Ghan,Ryan Steger and H.Kazerooni.Control and system identification for the Berkeley lower extremity exoskeleton(BLEEX)[J].Advanced Robotics,2005,(9):989-1014.
[4]Kota Kasaoka,Yoshiyuki,Sankai.Predictive Control Estimating Operator’s Intention for Stepping-up Motion by Exo-sckeleton Type Power Assist System HAL [C].//Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and System,2001:1578-1582.
[5]李晓明.基于外骨骼技术的机器人远程控制 [D].杭州:浙江大学,2004.
[6]刘志娟.多自由度下肢外骨骼控制系统研究 [D].杭州:浙江大学,2011.
[7]田双太.一种可穿戴机器人的多传感器感知系统研究 [D].合肥:中国科技大学,2011.
[8]王新亭,张峻霞,苏海龙,等.下肢外骨骼虚拟样机设计研究 [J].机械设计与制造,2013,(5):140-142.
[9]温成卓,吴张永,王娴,等.高速开关阀控插装阀的特性研究 [J].机床与液压,2012,40(23):61-63.
[10]杨智勇,张静,归丽华,等.外骨骼机器人控制方法综述 [J].海军航空工程学院学报,2009,24(5):520-526.
