高速高频舵机系统的设计准则研究
2014-11-29马瑜安
刘 流,马瑜安,邓 攀
● (1.海装上海局,上海 200000;2.中国船舶重工集团公司第704研究所,上海 200031)
高速高频舵机系统的设计准则研究
刘 流1,马瑜安2,邓 攀2
● (1.海装上海局,上海 200000;2.中国船舶重工集团公司第704研究所,上海 200031)
高速高频舵机的高速转舵控制和正弦转舵控制与舵机系统输出功率及截止频率密切相关。为了研究高速高频船舶舵机的设计准则,建立了基于ADAMS、AMESim和MATLAB的联合仿真模型。基于该仿真模型,分析了舵机系统输出功率及截止频率对舵机性能的影响,得出了高速高频舵机的设计准则。
舵机;设计准则;高速转舵控制;正弦转舵控制;仿真
0 引言
船舶舵机系统的作用是使船舶维持原来的航向或改变航向[1],由于液压系统具有出力大、响应快的特点[2],大型船舶一般采用液压舵机系统。大型液压舵机系统通常采用泵控闭式回路,通过控制变量泵斜盘机构来控制其输送到推舵液压缸的流量,利用油液难以压缩的特性控制推舵缸来实现舵的转动。
虽然现阶段国内研究机构对船舶舵机系统已经进行了较多研究[3-6],但对转舵速度高,跟踪性能好的液压舵机系统的研究相对较少[7]。开发高速高频船舶舵机系统,有必要研究其设计准则。
本文通过建立基于ADAMS、AMESim和MATLAB的联合仿真模型,分析舵机泵组输出功率和舵机系统的截止频率对舵机性能的影响,提出了高速高频船舶舵机系统的设计准则。
1 基于ADAMS、AMESim和MATLAB的舵机系统联合仿真模型的建立
根据给定的推舵机构机械结构参数,采用 Pro/E软件建立了舵机推舵机构的零件图,如图1所示。

图1 推舵机构的三维图
利用ADAMS软件和Pro/E无缝接口的功能,将推舵机构详细的三维装配图转换至ADAMS软件中,并添加约束和碰撞检查。定义输入接口为推舵液压缸所出的力,输出接口为舵柄的转角,以便在机械系统、液压系统和控制系统进行联合仿真时对模型进行调用。所建立舵机推舵机构的详细三维ADAMS动力学模型如图2所示。

图2 推舵机构的ADAMS模型
根据舵机液压原理以及所用主要元件的样本确定出舵机液压系统各部件的参数,在AMESim软件环境下建立液压系统的仿真模型。建立的双泵组、双柱塞缸舵机液压系统模型如图3所示。定义舵机液压系统AMESim模型的两个比例阀的电流控制信号为输入接口、柱塞缸所输出的力为输出接口。

图3 舵机液压系统AMESim模型
利用AMESim和MATLAB/Simulink的无缝接口,将AMESim液压系统模型导入至MATLAB/Simulink中,并基于Matlab/Simulink建立整个舵机系统的控制系统模型,转化后的AMESim液压系统模型中的主泵斜盘摆角控制指令、柱塞缸推力输出信号均与Simulink模块相连。所建立的舵机总体控制系统Simulink模型如图4所示。

图4 舵机总体系统Simulink仿真模型
2 舵机系统转舵性能影响因素分析
船用舵机转舵的高速实现与变量泵的输出功率紧密相关,而舵机的正弦舵角控制与泵控系统输出功率和系统的截止频率密切相关。本文分析了各种条件下舵机转舵的性能。在基于上述建立的联合仿真模型的分析中,期望舵机能实现的转舵速度为 5º/s、正弦转舵控制的幅值为 10º且频率为0.1Hz,折算到推舵油缸最大速度为0.0609m/s、正弦幅值为0.097m。
2.1 功率和系统截止频率均足够
不妨假定常规舵机的功率无穷(变量泵排量不限,推舵油缸工作压力不限)、舵机系统的截止频率也远大于正弦输入信号的频率。推舵油缸响应的位移仿真曲线见图5。

图5 功率和截止频率均足够的舵机响应曲线
由图5推舵油缸等速运行和正弦运行响应曲线可见,舵机系统输出功率和系统截止频率均足够大时,可实现期望的高速转舵和正弦转舵。
2.2 功率足够但截止频率较小
定常规舵机的功率无穷、系统截止频率小于正弦信号频率。若舵机系统截止频率为0.05Hz,则在常规PID控制下,推舵油缸响应的位移仿真曲线如图6所示。由图可见,正弦转舵幅值衰减90%,同时,舵速也不能快速达到设定转舵速度。其原因是,舵机系统频响低,响应慢。虽然可通过增加前馈控制的方法,使舵机实现一定的快速转舵和正弦转舵,但能力有限。

图6 功率满足但系统截止频率不满足的舵机响应曲线
2.3 系统截止频率足够但功率不够
1)缸出力足够,变量泵输出流量不够的情况 。假定舵机系统截止频率高于正弦转舵频率,但舵机因输出流量小,使系统输出功率不满足需求功率。设舵机的变量泵排量为125ml/r、电机转速1500r/min,并假定舵机输出力能满足正弦运行工况要求。 推舵油缸位移响应仿真曲线如图7所示。可见,125L/min的泵输出流量最大可满足0.0332m/s的缸速度,无法实现0.0609m/s速度推舵;正弦转舵时,近似为三角波。因此,舵机系统截止频率满足要求、输出推舵力足够大,而舵机输出流量不足时,不能实现高速转舵和正弦转舵。

图7 变量泵输出流量不够时油缸位移响应曲线
2)变量泵输出流量足够但缸出力不够。在系统截止频率满足条件下,设舵机最大输出力矩为810kNm,而实际负载力矩为850kNm。此时,推舵油缸的位移响应仿真曲线如图8所示。可见,舵机系统截止频率大于正弦频率、输出流量足够和输出力不足的条件下,可实现高速舵机转舵,但无法实现正弦转舵。

图8 变量泵流量足够而推舵缸出力不足时油缸位移曲线
3)变量泵输出流量和缸出力均不足。系统截止频率足够的条件下,变量泵输出流量和推舵油缸出力均不足的情况下,设舵机输出力矩为 810kNm,实际负载力矩850kNm,泵的排量 125mL/min。此时,推舵油缸的位移响应曲线如图9所示。可见,系统截止频率满足要求,而变量泵的输出流量和推舵油缸的输出力均不足时,舵机无法实现高速和正弦转舵。
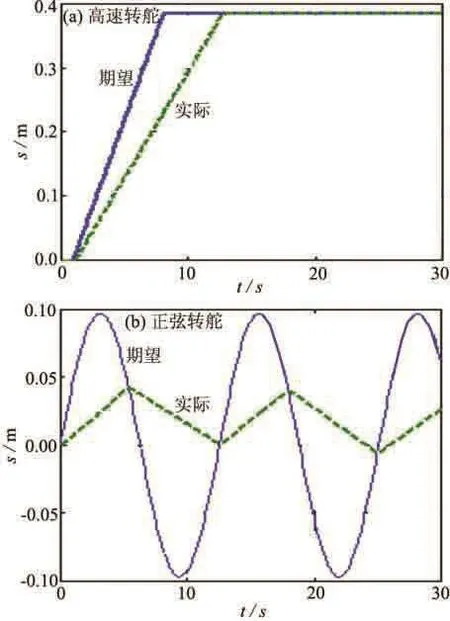
图9 舵机输出流量和输出力矩均不够时油缸位移响应曲线
3 结论
1)在舵机系统输出功率大于系统运行要求的功率且系统截止频率高于正弦转舵频率的条件下,可实现高速转舵和快速正弦转舵。
2)在舵机系统截止频率和变量泵排量足够,而推舵油缸出力不够的条件下,可实现高速转舵,但无法实现正弦转舵。
3)在舵机系统截止频率和推舵油缸输出力足够,而变量泵排量不够的条件下既不能实现高速转舵又不能实现正弦转舵。
4)舵机系统截止频率足够,而变量泵排量和推舵油缸输出力均不足的条件下,既不能实现高速转舵又不能实现正弦转舵。
通过以上结论,得出实现舵机高速转舵和正弦控制的设计准则为:所有运行工况下,泵控系统瞬时输出功率大于负载瞬时功率;舵机系统的截止频率大于正弦转舵输入信号频率。
[1] 苏东海,黄鑫.船舶舵机液压参数设计[J]. 液压气动与密封, 2008 (6): 14-16.
[2] 李洪人.液压控制系统[M]. 北京:国防工业出版社,1988: 1-20.
[3] 黄勇亮,卢晓春.船舶舵机的模糊 PID 控制[J]. 装备制造技术, 2009(7): 27-29.
[4] 霍学亮,任光,张均东.基于Simulink的船舶舵机系统的建模与动态仿真[J]. 大连海事大学学报, 2007,33(Sup): 74-76.
[5] 江小霞,朱钰.船舶舵机单神经元自适应 PID 控制的究[J]. 船舶工程, 2009, 31(4): 56-58.
[6] 张礼华,卢道华,刘芳华.船舶舵机个体Agent的研究与构建[J]. 船电技术, 2004 (6): 26-29.
[7] 祝惠一.船舶液压舵机系统设计研究[D]. 重庆:重庆大学, 2010: 1-10
Research on Design Criterion of High Speed High Frequency Steering Gear
LIU Liu1, MA Yu-an2, DENG Pan2
(1. Armament Department of PLAN Shanghai Bureau, Shanghai 200000, China; 2. No.704 Research Institute, CSIC, Shanghai 200031,China)
High speed steering control and sine steering control are relative to the output power and cut-off frequency of high speed high frequency steering gear.In order to figure out the design criterion of the Gear, Combined simulation model based on ADAMS,AMESim and MATLAB is built. Based on the model, the article analyses the impact of output power and cut-off frequency on the performance of steering gear, and the design criterion of high speed high frequency steering gear are obtained.
steering gear; design criterion; high speed steering control; sine steering control; simulation
TH39
A
刘流(1982-),男,工程师,助理员,海军装备研究院上海局综合计划处。
