基于定子电流的电力推进船舶螺旋桨故障诊断
2014-11-28褚建新沈爱弟
黄 辉, 褚建新, 沈爱弟
(上海海事大学 航运技术与控制工程交通部重点实验室, 上海 201306)
基于定子电流的电力推进船舶螺旋桨故障诊断
黄 辉, 褚建新, 沈爱弟
(上海海事大学 航运技术与控制工程交通部重点实验室, 上海 201306)
针对电力推进船舶建立船桨模型,研究螺旋桨和推进电机以及螺旋桨转距和推进电机定子电流之间的关系。通过提取推进电机中定子电流信号以及分析定子电流的频谱,对螺旋桨的故障进行诊断,仿真实验证明了该方法的有效性。
船舶工程;电力推进;定子电流;螺旋桨故障;频谱分析
电力推进船舶的推进系统通常由推进电机和螺旋桨组成,其中螺旋桨是船舶前进的最重要动力源。船舶航行的水域有时十分复杂,如码头附近有漂浮的硬物、航道上有沉船、冰区有浮冰。船舶在复杂的水域中航行时,螺旋桨可能会出现碰到水中漂浮物、发生搁浅、缠到缆绳或锚链等状况,造成卷边、桨叶变形,严重的甚至造成桨叶折断。因船舶螺旋桨故障而发生重大海上安全事故的案例屡见不鲜。例如2000年11月,法国“戴高乐”号航空母舰在北大西洋进行首次远洋试验时发生了螺旋桨桨叶折断事故,造成了严重的经济损失和政治影响。[1]
受工作环境的限制,对船舶螺旋桨进行状态监测和故障诊断十分困难。为保证船舶安全运行,通常会对其螺旋桨进行定期检查,但针对性和准确性不高,而且不能在船舶航行过程中实时发现问题,以便及时采取措施。因此,可采取间接检测的方式对螺旋桨的状态进行判断,即通过检测与螺旋桨相关的机械的或电的变化判断螺旋桨的状态。这种间接方式具有实时、准确等优点,是研究的重点。文献[2]对螺旋桨轴油液的常规理化性能检验、油液光谱分析和铁谱分析等油液检测技术进行了研究,通过分析螺旋桨轴油液,对螺旋桨轴进行故障分析。文献[3]通过提取导管内壁的压力脉动数据,建立了基于CFD的导管螺旋桨故障诊断系统;通过研究螺旋桨不同故障工况下的水动力性能和流场特点,提出螺旋桨故障监测与诊断的方法,取得了良好效果。文献[4]将非线性滑模观测器引到水下航行体螺旋桨的故障诊断中,从设计的非线性观测器中提取故障诊断信息,利用模糊诊断原理分析残差信号,通过分析残差序列水下螺旋桨进行故障诊断。对于电力推进船舶,其推进电机定子电流与螺旋桨负载的变化息息相关,对推进电机电子电流进行分析可间接得出螺旋桨状态的变化,电机定子电流的分析也已成为很多场合故障诊断的依据[5-7]。
基于推进电机定子电流的电力推进船舶螺旋桨故障诊断方法,即当电力推进船舶的螺旋桨发生卷边、变形、断裂等故障时,其转矩会发生变化,从而引起推进电机转矩的变化,推进电机定子电流也会发生相应变化。因此,通过分析推进电机定子电流的异常,对电力推进船舶的螺旋桨进行故障诊断。
1 螺旋桨与推进电机的数学模型
在内河船舶电力推进系统中,推进电机一般选用4极异步变频电动机。在较大容量的电力推进系统中,推进电机直接连接螺旋桨,中间不配置减速齿轮箱,系统的结构见图1。
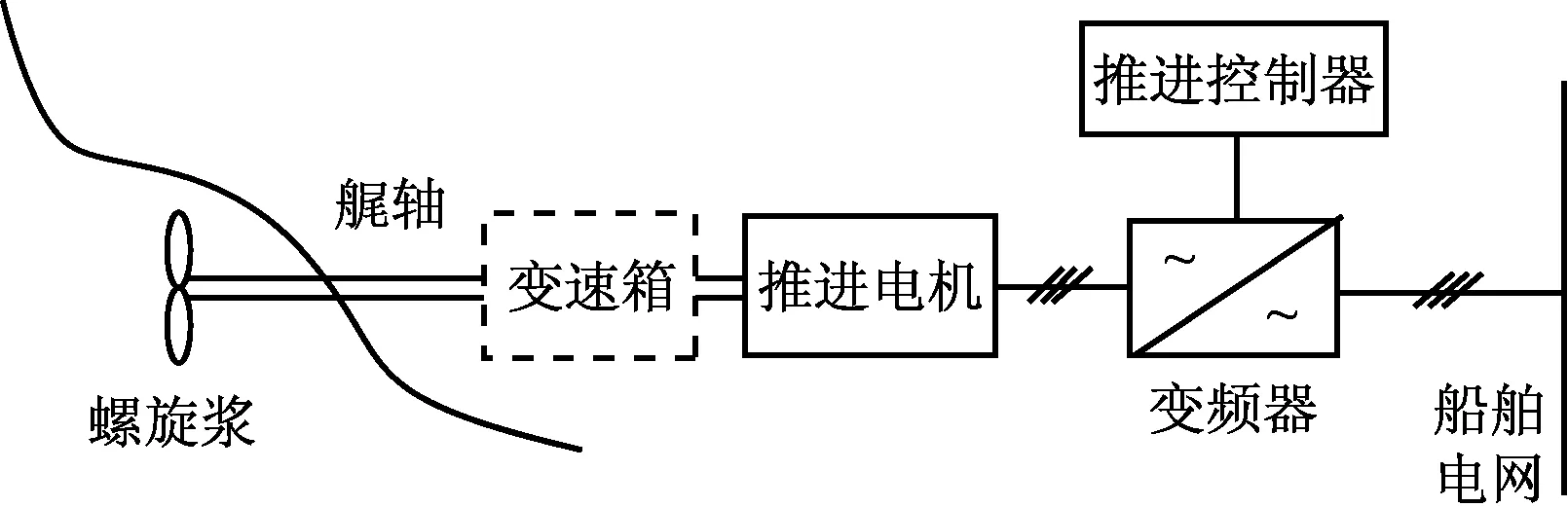
图1 推进系统结构
由船-桨系统的特点及其基本理论可知,桨的推力和转矩随进速系数的不同而变化。由于桨的转速可测、船速可由船-桨模型求得,因此可建立如下船-桨模型[8]:
(1)
(2)
(3)
(4)
KQ=KQ(J)
(5)
KT=KT(J)
(6)
(7)
式(1)~式(7)中:λ为附加质量系数;m为船体质量;vs为船舶相对于水域速度;t为推力减额系数;P为螺旋桨推力;TQ为螺旋桨转矩;Rf为船舶所受的阻力;n为螺旋桨转速;DP为螺旋桨直径;ρ为水的密度;ξ为船舶总阻力系数;w为伴流系数;KT为推力系数;KQ为转矩系数;J为进速系数。其中,式(5)和式(6)的曲线值可由螺旋桨的敞水特性获得。
推进电机驱动螺旋桨,水中转动的螺旋桨产生推力并作用于船体,使船舶发生运动。可见,船-桨系统中存在2个惯性子系统:螺旋桨旋转子系统和船舶平动子系统,两者之间有推力和转矩的传递。图2给出了船舶运动的船-桨模型框图[9]。
船舶直线航行时,输入的是螺旋桨转速,输出的是船舶航行的航速和螺旋桨转矩。船舶与螺旋桨之间的运动是相互影响的,船体对螺旋桨的作用称为伴流系数,螺旋桨对船体的作用称为推力减额系数。转矩受伴流系数的影响,而航速由螺旋桨推力(受推力减额系数的影响)产生。
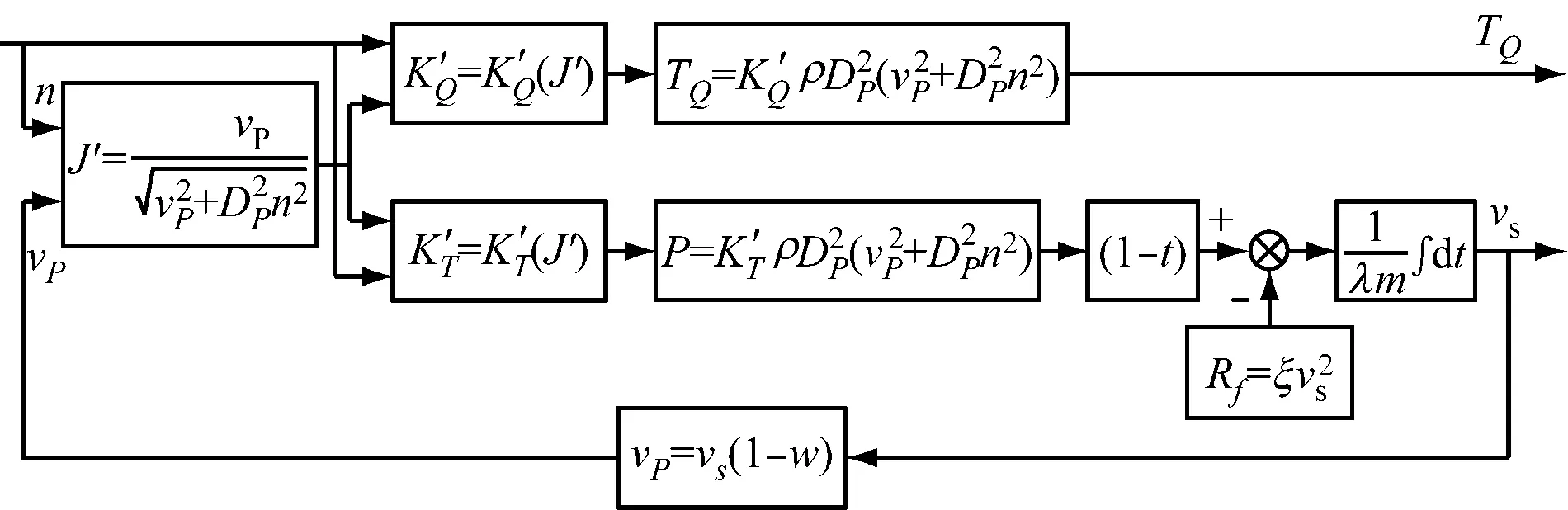
图2 船-桨模型框图
2 推进电机定子电流与螺旋桨转距关系
为分析转矩与定子某一相电流的关系,通过M-T同步旋转坐标变换建立推进电机的数学模型,分析其定子电流。经过M-T坐标变换后,把定子电流分离成了转矩分量和磁通分量2个独立变量。[10]

图3 推进电机M-T轴系动态等效电路
令M轴与定子磁通链的方向Ψs一致,M轴和T轴相互垂直。由于Ψs方向与M轴一致,因此Ψs在T方向上的分量ΨsT为0。isT是产生电磁转矩Te的有效(转矩)电流分量,isM是产生有效磁势、磁通的励磁电流分量。
在同步旋转M-T坐标变换中,坐标轴与定子旋转磁场同步旋转,T轴和M轴相互垂直,M轴与定子旋转磁通方向一致,可把A,B,C三相电流在T轴和M轴上分解为
(8)
当异步电机同步旋转M-T坐标变换M轴与定子旋转磁通方向一致时,其状态方程为
(9)
由此可得
(10)
转子回路方程可表示为
(11)
电磁转距为
(12)


(13)
(14)
式(13)~式(14)中:ωs为转差角速度,ωs=ω-ωr。ω,ωr分别为旋转磁场旋转角速度和转子的旋转角速度。
在实际的电力推进系统船舶中,推进系统的传动轴较短,若忽略其转动惯量,机械运动平衡方程为
Te-Bmωm-Jmpωm=TQ
(15)
式(15)中:Te为推进电机电磁转矩;ωm为推进电机机械角速度;JP为螺旋桨转动惯量;Bm为推进电机黏滞摩擦系数;p为微分算子;TQ为螺旋桨转矩。
由式(13)~式(15)建立螺旋桨转矩与推进电机定子电流间的关系。将式(8)展开,可得到由isM,isT表示的A,B,C三相电流,例如A相电流为
isA(t)=i0sin(2πft+φ0)
(16)
isM及isT不能直接测量,利用坐标变换可得到由isM及isT表示的A,B,C三相电流,其中式(16)为正常状态下定子电流的表达式,故障时电流中包含了电网频率和螺旋桨故障振动的故障频率,可通过分析定子电流检测出螺旋桨故障。
3 仿真实验
假设船舶正处于正常航行状态,式(1)的附加质量系数λ取1.1,船舶正车航行时推力减额系数t取0.145 5,伴流系数w取0.157,阻力系数取10[11],仿真中螺旋桨与推进电机直接相连,电机转速取600 r/min。根据对螺旋桨水动力性能的分析, 可在MATLAB中仿真出螺旋桨故障诊断模拟系统(见图4)。
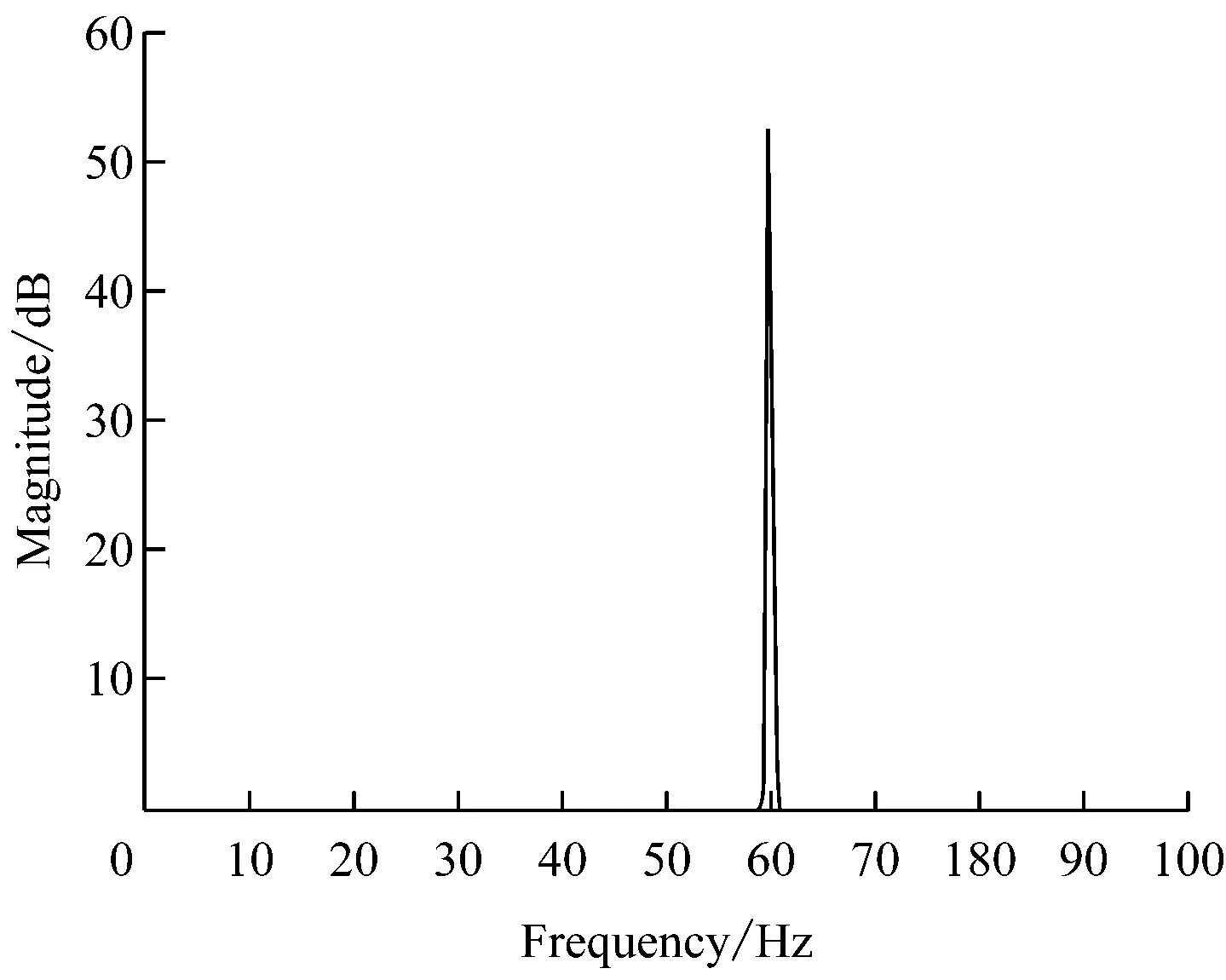
图5为螺旋桨故障前和故障后仿真所得的定子电流时域信号,可看出,当螺旋桨出现损坏时,推进电机定子电流时域信号并未出现较大歧变,根据电流的时域波形判断不出螺旋桨故障,其时域反应并不明显。图6为螺旋桨故障前和故障后的定子电流的频域信号,其中60 Hz为提供推进电机运转的交流电频率,故障前频谱中只存在这一频率。产生故障后,频谱中产生了间隔为10 Hz的边频带,这与仿真前设置的螺旋桨转速频率一致,故可判断螺旋桨出现了故障。

图4 螺旋桨故障检测示意图

(a) 故障前

(b) 故障后
综上所述,推进电机定子电流对由转矩引起的波动十分敏感,当故障电流信号在时域表现不明显时,可对其进行频谱分析,在频域中观察频谱变化、判断运行状态。
通过分析推进电机定子电流,对螺旋桨进行监测。螺旋桨故障种类有很多,最直接的表现为转矩的变化导致定子电流频谱的变化。如果需要更详细地检测螺旋桨损坏程度(如卷边程度、断裂程度等),需通过大量试验提取故障数据以及更深入的分析手段,通过分析故障数据掌握螺旋桨各种故障从轻微到严重时定子电流的变化规律,掌握故障早期的信号特征,以便及时采取措施。
对于推进系统的其他故障,也可通过分析推进电机定子电流得出,每种故障对应一种信号,比如,若齿轮出现点蚀磨损,定子电流中会出现与齿轮齿数及转轴频率乘积对应的故障频率,由此可进行故障的判断。如需确切知道故障的程度,同样需要进行大量的试验与分析。
(a) 故障前
(b) 故障后
4 结 语
鉴于螺旋桨工作环境的特殊性,直接对螺旋桨进行故障诊断比较困难,这方面研究也较少。本文采用间接检测推进电机定子电流的方法对螺旋桨进行故障诊断,仿真实验结果证明了该方法的有效性,可为进一步进行螺旋桨的故障诊断工作提供帮助。
[1] 王致成. 海上吞金兽为何伤病瘫痪[J]. 航海, 2001(3): 42-43.
[2] 孟昭玉. 船舶螺旋桨轴状态监测技术[D]. 上海: 上海海事大学, 2005.
[3] 欧礼坚. 船舶螺旋桨及推进装置故障诊断关键技术研究与应用[D]. 广州: 华南理工大学, 2010.
[4] WANG Jianguo. Thruster Robust Fault Diagnosis of Underwater Vehicle[C]. Proceedings of the 31st Chinese Control Conference, 2012.
[5] 杨江天, 赵明元, 张志强,等. 基于定子电流小波包分析的牵引电机轴承故障诊断[J]. 铁道学报, 2013, 35(2): 32-36.
[6] 肖蕙蕙, 熊隽迪, 李川,等. 基于定子电流监测方法的电机故障诊断[J]. 电机与控制应用, 2008, 35(1): 54-57.
[7] 余为清. 基于小波神经网络的牵引电机齿轮故障诊断研究[J]. 煤矿机械, 2013, 34(4): 290-292.
[8] 李殿璞. 船舶运动与建模[M]. 哈尔滨:哈尔滨工程大学出版社, 1999.
[9] 沈爱弟, 黄学武, 郑华耀,等. 半实物吊舱式电力推进仿真系统的设计[J]. 扬州大学学报:自然科学版, 2005,8(1): 74-78.
[10] 苏恒, 洪迈生, 熊诗波. 通过监测电机的定子电流实现齿轮的故障诊断[J]. 上海交通大学学报, 2000, 34(10): 1 413-1 416.
[11] 鲍毅, 许定生. 船舶阻力的相关系数及其应用[J]. 船舶工程, 1996(6):27-30.
DiagnosisofPropellerFaultofElectricPropulsionShipBasedonStatorCurrent
HUANGHui,CHUJianxin,SHENAidi
(Key Laboratory of Marine Technology amp; Control Engineering Ministry Communications, Shanghai Maritime University, Shanghai 201306, China)
The ship-propeller math model of the electric propulsion ship is established, and the relation between the propeller torque and the motor stator current is studied. The spectrum analysis of the motor stator current is performed to diagnose the fault of the propeller of the electric propulsion ship. The method is proved effective by simulation test.
ship engineering; electric propulsion; stator current; propeller fault; spectrum analysis
2014-05-12
科技部2012年度国际科技合作与交流专项(2012DFG71850);上海市科委地方院校能力建设专项(11170501700)
黄 辉 (1982—), 男, 安徽滁州人,博士生,从事电力推进系统建模仿真与故障诊断研究。E-mail: huihui3000@163.com
1000-4653(2014)03-0028-04
U664.33
A
