基于ANSYS的静电微执行器吸合现象分析
2014-11-16郑丽云龚友平刘彦辉
郑丽云 龚友平 刘彦辉
(杭州电子科技大学机械工程学院,浙江 杭州 310018)
随着微机电系统技术(MEMS)的发展,静电力被普遍选作为MEMS传感器、执行器的驱动方式,它将点电荷之间的电场力转化为驱动力。通常以单端固定的横梁作为传感器的机械力驱动部分,在横梁下设置有固定电极,用极板间的电场力驱动横梁运动。采用电压或者电荷控制驱动器时,当结构的可动电极运动位移达到特定值时,呈线性变化的弹性力和呈非线性的静电力处于平衡状态,由于电场力变化的速度远大于横梁弹性力变化的速度,当施加电压或电荷超过某临界值时,就会产生横梁被固定电极突然吸合的现象。了解静电力驱动的基本原理以及吸合现象的产生是提高静电力驱动器件研究水平的关键内容。
1 平行板电容器静电力驱动的基本原理
1.1 静电驱动的基本定理
由库伦定理可知,当点电荷处在真空中时,相互间的电场力与其所带电量的乘积成正比,与其之间距离的二次方成反比,作用力的方向沿着这两个点电荷的
连线。同样处于空间介质中的两个点电荷同样适用于库仑定律。
1.2 微开关电容器简化模型

图1 平行板电容模型
如图1所示,当给两个平行极板形成的电容器两端施加电压V时,电容极板间带有极性相反的电荷量Q并由因此产生静电吸引力Fe。此时,电容器存储能量为:

式中电容C为:

式中:A是两板之间正对面积,ε是真空介电常数,εr是相对介电常数,d0是极板间初始距离。
由此可以得到电容器存储能量与电容极板距离之间的关系为:

上式中,W对极板间距离d0求一阶偏导,即可得到极板之间的静电吸引力Fe为:

从式(4)中可以看出,极板之间产生的静电力与极板两端的电压的平方成正比,跟极板间距离的二次方成反比,产生的静电吸引力随极板间距离减小而增大。
2 静态吸合分析
2.1 模型假设与简化
为了分析静态吸合现象,我们需要对所提出的电容模型做一定的假设和简化:即忽略惯性阻尼等因素的影响,极板间施加电压变化缓慢以至于可动极板在电场力、上极板回复力共同作用下在任意时刻都能够保持在稳定状态,可动极板的速度以及加速度都为零且期间不会存在震荡现象;极板的运动是理想化的,即为可动极板只能随弹性梁和敏感质量块在固定极板的上方做垂直运动。
2.2 微开关的静态吸合现象
对于常见的MEMS加速度计系统,静电力驱动结构常常是由固定极板、可动极板、弹性梁和敏感质量块组成。可动极板往往和弹性梁以及敏感质量块连接在一起,当极板间发生静电作用时,弹性梁会产生弹性力来平衡静电引力,假设极板间距缩小x,此时,系统达到平衡,则:

将上式化简成关于x的函数可得:

假设在施加电压V0时,系统达到平衡,做功为零,则由将(6)式两端分别对x求导得:

最终求得平衡临界位置xp( 0<x<d0):

该位置就是极板的吸合点,与吸合位置对应的电压即为极板的吸合电压:
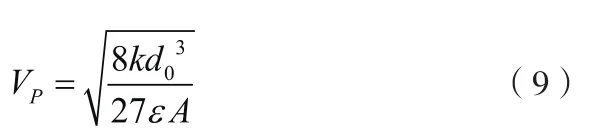
由式(6)利用Matlab软件可得到电容极板两端施加的电压与平衡位置的关系曲线如下图。由图2可知随着施加在电容器极板两端的电压逐渐增大,可动极板的位移逐渐增大,系统此时处于稳定平衡状态,当平行板电容器极板两端的电压增大到吸合电压时,即系统达到临界平衡点,也就是图中的曲线的最右侧位置;此时系统也处于平衡状态,如果继续增加电压,系统就会瞬间崩塌,可动极板和固定极板将迅速吸合在一起。结合式(8)、式(9)可知为使系统保证平衡稳定状态,驱动电压不应超过临界电压Vp,其对应最大平衡点位置为

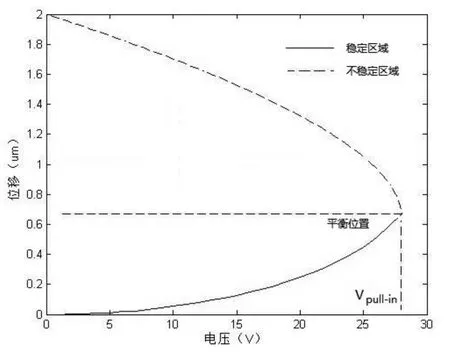
图2 电容器极板吸合电压与上极板位移变化曲线
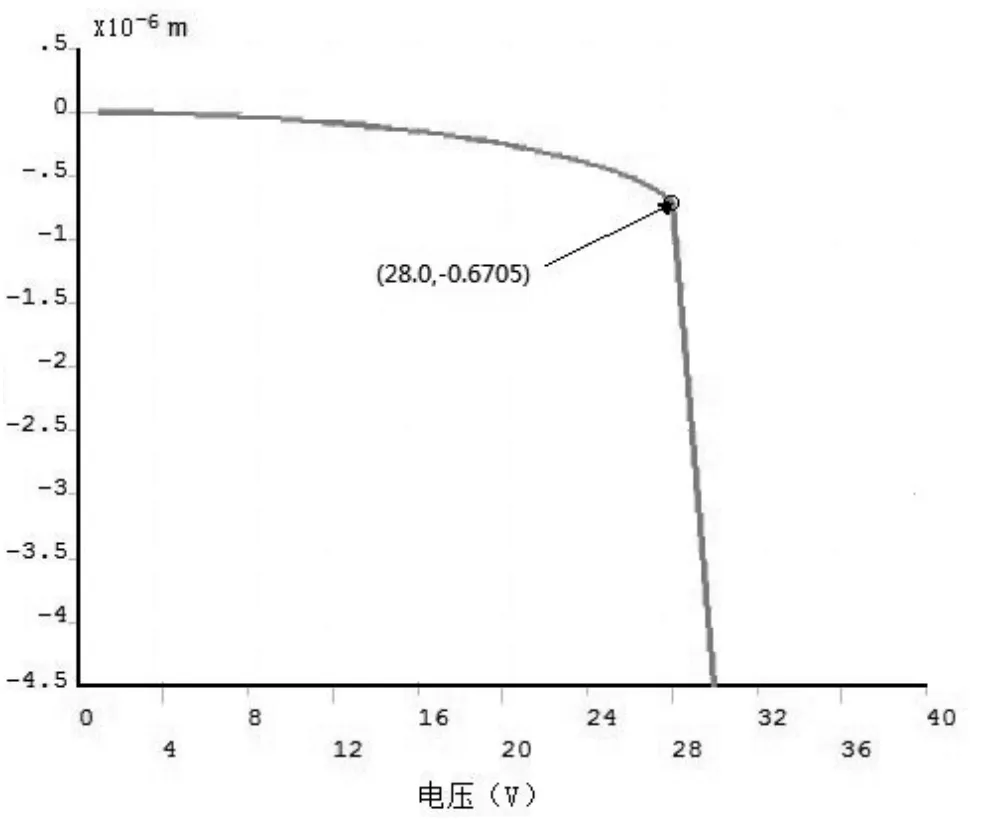
图3 驱动电压和悬臂梁端点位移关系

表1 微开关的参数模型
3 有限元仿真分析
在MEMS传感器、执行器设计中,通常以单端固定的横梁作为传感器的机械力驱动部分,在横梁下设置有固定电极,用极板间的电场力驱动横梁运动。而静电吸合现象是静电力驱动微执行器的一个重要特征,将直接影响整个微器件的性能,引起了业界广泛关注和研究,本文将采用有限元法对其进行耦合分析。
3.1 机电耦合理论分析
在微开光中悬臂梁在静电力的作用下发生偏转。当采用有限元方法来研究这一运动过程时,涉及到电磁场和结构场学之间较复杂的耦合分析,当在微驱动器上施加驱动电压后,悬臂梁受到电场力作用而向下偏转,使得悬臂梁与固定电极之间的距离减小,极板间距离的变化反过来影响电场分布,从而使得静电力的大小随之变化。在分析中涉及到结构场和静电场的耦合迭代分析,需要将前一个场的分析结果作为边界条件和载荷传递到下一个场分析中,因而我们选用有限元分析中顺序耦合法来进行微驱动器的结构场和静电场耦合分析。
3.2 ANSYS模型建立及求解
微开关结构模型参数如表1。
悬臂梁建模选用SOLID45单元,静电场建模选用TRANSl26单元,该单元支持在节点X、Y和Z方向上的运动,可以联合多个单元来表示设备的全三维平移响应。因而可以通过一个完全表征了耦合电子机械响应的降解单元来模拟静电驱动结构。典型应用包括微加速度计、微开关和微镜设备中。
通过采用有限元分析软件的力-电耦合分析,对微驱动器在施加电压条件下的运动进行模拟分析。图3显示了驱动电压V和微开关悬臂梁边缘点偏移量Y的关系。
3.3 结果分析
由图可得,电压从0开始,以5 V的步长线性递增到30V,随着驱动电压逐渐增加,微开关悬臂梁端点逐渐向下运动,当电压到达28V时,悬臂梁端点被迅速吸合到固定极板上,此时悬臂梁边缘沿Y方向位移为-0.6705 um,该点即为吸合现象发生时对应的驱动电压和位移。
将参数代入理论公式中,可以得到系统的吸合电压为28V,对应吸合点为上极板边缘位移Y=0.6667um。由此可以得出在不考虑边缘效应的情况下,对于微开关中悬臂梁的吸合现象理论分析结果和ANSYS仿真分析结果分析基本一致。
结语
本文对平行板式静电微执行器的典型应用微开关进行理论分析,得到了描述吸合现象的基本方程。结合静电力驱动膜片结构,对光开关中的悬臂梁机构,采用ANSYS仿真的方法得到了悬臂梁的末端位移曲线,并与解析法相比较取得了一致的效果,为静电微驱动控制提供了一定的理论依据。
[1]马海阳.光开关中静电驱动的微悬臂梁耦合分析[J].光学仪器.2003(3):17-20.
[2]李成诗.基于ANSYS悬臂式RF MEMS开关的力学模拟和疲劳分析[J].半导体技术.2004 (10):22-26.
[3]石文尚.考虑漏电容的平板式微执行器Pull-in机理分析[D].南京邮电大学.2011.
[4]胡雪梅.微机械电容式加速度计的系统分析[D].西安电子科技大学.2006
[5]李成诗.基于ANSYS悬臂式RF MEMS开关的力学模拟和疲劳分析[J].半导体技术.2004 (10):22-26.
[6]张日浩,吴永根.基于ANSYS的受变化静电力微结构的动态特性分析[J].机电信息.2013(3):106-108.